电力牵引货运列车节能运行研究(二):速度跟踪组合控制方法
2016-05-07 02:46贾利民付云骁罗云凤
铁道学报 2016年6期
杨 杰,贾利民,付云骁,罗云凤
(1.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;2.江西理工大学 电气工程与自动化学院,江西 赣州 341000)
在给定目标速度曲线的前提下,如何实现对速度曲线的高品质追踪控制,直接影响列车运行控制的安全性和节能性。列车运行过程是典型的非线性、大滞后、多约束、多目标的复杂时变过程,对这个过程的控制采用既有的基于线性模型和线性控制器的方法往往难以收到理想的控制效果。
目前,关于列车节能运行控制的研究主要分为目标速度曲线优化和目标速度跟踪控制两大环节。其中,目标速度曲线是控制系统跟踪的对象。列车速度跟踪控制主要是针对列车运行控制的特点,设计节能性好、鲁棒性强、适用范围大、运算速度快、安全稳定的智能控制系统。该领域国内外相关研究所采用的方法树状图如图1所示。

图1 列车节能运行控制国内外研究方法树状图
列车节能运行控制问题最早提出于20世纪60年代[1]。半个多世纪以来,国内外专家学者对该领域的发展进行了广泛的研究[2-9]。20世纪80年代起,随着计算智能的发展, 许多学者开始尝试运用人工智能解决列车运行控制问题。日本学者Yasunobu[5,10]最早取得实质性的突破,成功将模糊控制技术应用于仙台地铁系统,奠定了模糊控制在本方向发展的重要基础。近五年来, 文献[11-14]从不同角度运用不同方法对列车节能运行控制问题展开了积极探索,并取得了丰硕的成果,为本领域的发展起到了积极的推动作用。
文献[15]基于模糊逻辑提出了用机器语言实现优秀司机专业知识与决策过程的表达与建模,并逐步将模糊预测、两层递阶控制、智能多目标优化理论应用到了中国铁路的自动控制领域。文献[16-21]对本领域展开了持续、深入的研究工作,并取得了许多重要成果。为本领域的发展奠定了重要基础。
基于人工智能的控制方法对模型的依赖性比较低,能够解决或者减弱列车系统的非线性问题,且通过程序设计比较容易处理各种约束条件。但该类方法往往存在计算量与计算精度之间的矛盾。同时,控制策略的工程可行性要求控制级位变化频率不宜太高、变化幅度不能太大,且要考虑电气、机械系统的响应时间。况且,我国铁路交路长,机车型号多,线路复杂,行车密度大。我国针对特定线路和列车制订“列车操纵示意图”不具普遍意义,国外已有的节能运行控制系统也难以适应中国复杂的路网环境。另一方面,限于我国铁路行业对安全生产等方面的考虑,研究成果在现场测试和应用是比较困难的,这也在一定程度上影响了理论研究成果与实际工程应用之间的充分对接。
综上所述,基于前人成果,充分借鉴控制、优化、通信、IT等领域的最新方法,借助于软件仿真和半实物联合仿真等技术手段,研究开发新一代智能速度跟踪控制系统具有重要的学术意义和实际应用价值。
1 问题描述
列车是一个庞大的系统,在不同维度上分为ATS(列车自动监控系统)、ATC(列车自动控制系统)、ATP(列车自动防护系统)、牵引传动系统、制动系统、受电系统、牵引供电系统、辅助供电系统、转向架系统、故障诊断系统、通信系统、司控系统和人机界面等多个子系统,如图2所示。

图2 机车构成(部分)示意图
本文基于前期关于目标速度曲线优化的研究成果[21],依据给定的车、路、时条件,在满足运行约束的前提下,实现货运列车运行速度对于目标速度曲线的准确跟踪控制。列车控制系统结构原理示意图如图3所示。

图3 列车控制系统结构原理示意图
控制目标主要体现在节能性、安全性、运行品质三个方面。其中,节能性主要是指在给定的运行条件和运营约束条件下,以最小的牵引能耗完成行车任务。安全性目标主要包含纵向冲动限制和防止撞线制动两种情况。运行品质则要求列车的操纵行为要尽量保持稳定操纵、速度平滑、准点运行和精确停车。
2 仿真平台设计
为了便于在算法设计过程中对算法效果进行直观的验证、对比和仿真分析,本文在MATLAB环境下基于GUI界面设计、M文件和Simulink模型混合编程设计了如图4所示的列车运行控制仿真平台。

图4 软件仿真平台构成示意图
利用GUI图形界面设计开发了人机界面。可以对各种参数、模式、精度、线路等信息进行设置,并传递给M文件和Simulink模型进行相关的计算。仿真结果如图5所示。
如图5所示,人机界面的主窗口分为上下两个区域,上半部为各种仿真参数的设置。下半部为两个图形显示窗口,左边的是目标速度曲线优化[21]的结果显示,右边的是列车运行速度跟踪控制的仿真结果显示。由于版面限制,为了保证插图的清晰度,后文中的仿真图没有直接采用软件仿真平台的人机界面截图,而是在Matlab环境下将数据提取出来,重新对速度跟踪控制效果进行单独绘图。

图5 软件仿真平台人机界面设计
3 算法设计
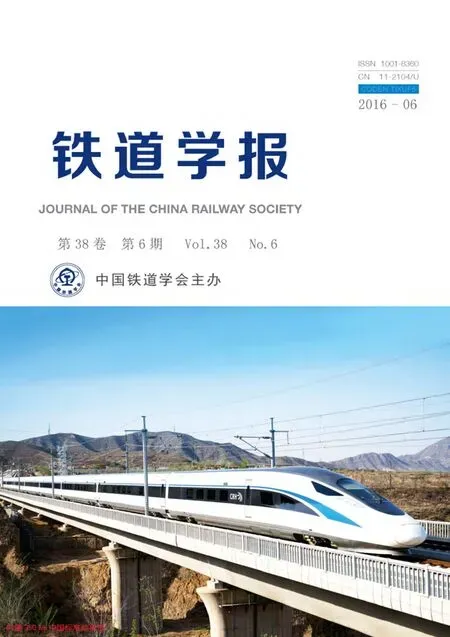
由于列车是典型的大惯性、大滞后系统,我国现有机车主要采用了相对比较成熟的PI(比例积分)控制技术。该技术是一种比较经典的线性控制器,它根据给定值与输出值之间的误差,通过权值Kp和Ki对比例和积分项进行线性组合,形成控制量,具有简单、易用、稳定等优点。但列车系统是典型的非线性、多约束复杂系统,随着时代的进步,单纯采用PI算法的控制效果如图6所示,已经难以满足系统对控制精度的要求。
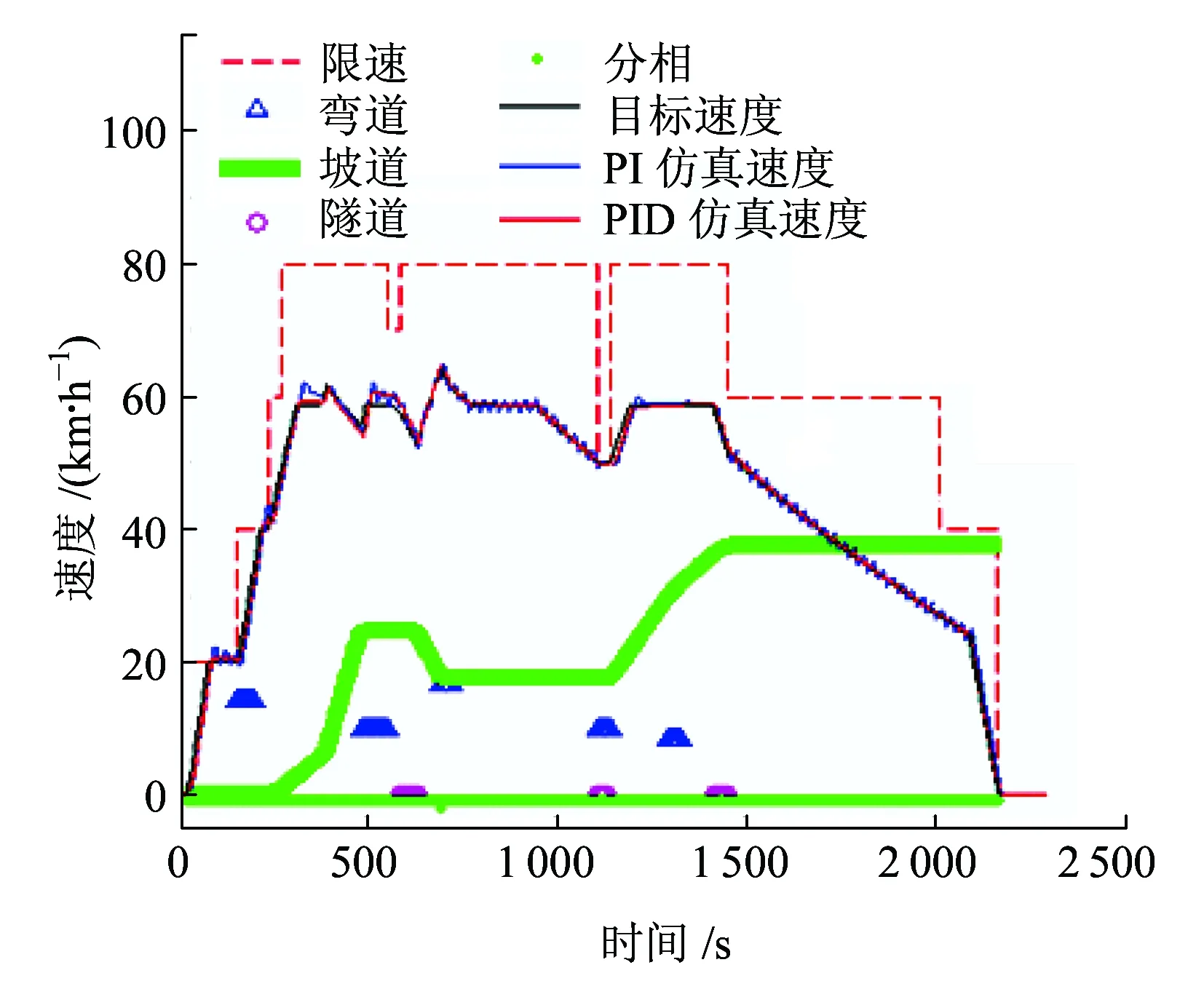
图6 PI控制器的速度跟踪控制效果仿真
在图6中,蓝色三角形用以标识该处为弯道,三角形在图中的纵坐标是弯道半径的倒数乘以1 200。多个蓝色三角形重叠在一起时,看上去会像是梯形。绿色粗曲线是该处的海拔高度,坐标数值以坐标轴纵轴为准,以表征线路的坡度情况。横坐标上有粉色圆圈的地方代表此处为隧道。绿色直线下方多了一点,表示此处为分相。
3.1 模糊PID(FPID)控制器
模糊控制可以形式化地表达和实现人的控制策略、知识和经验。不需要对被控对象的精确建模,具有鲁棒性强、容错能力强和运算量相对较小的优点,对于PID算法无法处理的非线性、强耦合、时变、大滞后问题能够较好地应对。通过针对性地设计,模糊规则可以充分融入优秀司机的驾驶经验,使得控制器具有更好的鲁棒性,控制系统能够合理应对列车运行过程中的控制目标变化、动力学特征变化、约束条件变化以及运行环境特征变化等线性控制系统无法处理的情况。但单纯使用模糊控制对列车运行进行控制则控制精度不高、动态特性较差。
FPID控制器充分结合PID控制和模糊控制的优点,通过模糊控制在对象描述方面的优势,在模糊规则的设计中融入人类关于快速响应、抑制超调、快速收敛的先验知识, 动态调整PID控制器的参数, 从而改进PID控制器的动态性能,具有较好的动态性能。PI、PID和FPID控制器对带有时滞特性的系统关于单位阶跃信号的响应如图7所示。

图7 PI、PID和FPID对阶跃响应的对比
由图7可知,对于大滞后系统而言,FPID在上升时间、峰值时间、调节时间等动态特性上都具有明显优势,加速快、超调小、收敛迅速。而PID算法对于大滞后系统的控制,在超调量上略小于PI,但在调节时间方面并不比PI算法的控制效果具有明显优势。本文针对列车系统的运行特性和控制要求,在Simulink平台中设计了如图8所示的FPID控制器模型。
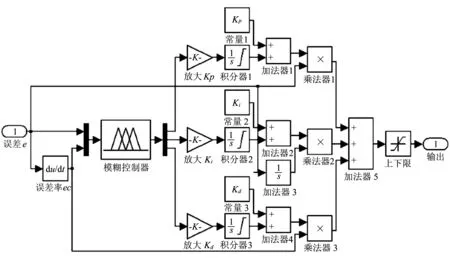
图8 FPID控制器模型
如图8所示,控制器对给定值与输出值之间的误差求导数,并根据误差和误差的导数按照模糊规则输出Kp、Ki和Kd的修正变化率Kpc、Kic和Kdc。修正变化率经过积分累加后分别与Kp、Ki和Kd进行求和,改变PID算法的Kp、Ki和Kd参数,从而改变输出的走势。
模糊规则的设计需要充分考虑被控对象的特点,借鉴人类智能在系统操纵领域的先验知识进行设计。本文的模糊规则见表1~表3。

表1 FPID控制器模糊规则(Kp)

表2 FPID控制器模糊规则(Ki)

表3 FPID控制器模糊规则(Kd)
值得一提的是,在对Kpc、Kic和Kdc进行积分时,必须设置上下限,否则,随着时间的推移,积分结果会出现累计效应,使得Kp、Ki和Kd出现无法预测的大范围漂移,影响控制效果。同时,上下限的设置即不能太大,也不能太小。太大的话无法对Kp、Ki和Kd的漂移进行很好的约束;太小的话又会限制Kp、Ki和Kd的变化范围, 失去了FPID的优势。设计人员需要在设计过程中结合模糊规则的设置反复斟酌、推敲。本文对该算法的限制范围是初始值的0.2~5倍。
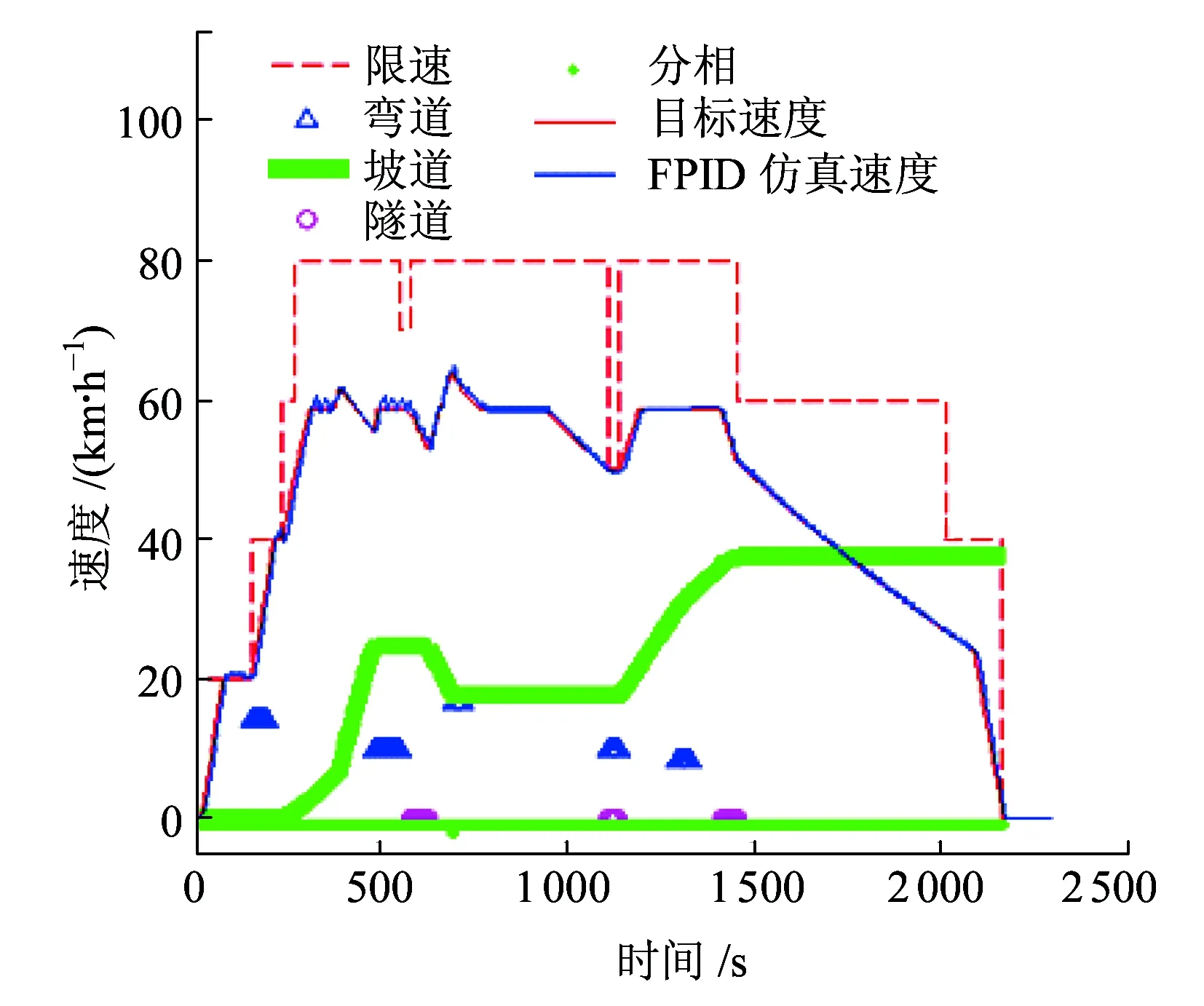
图9 FPID控制器的速度跟踪控制效果仿真
如图9所示,FPID控制器的速度跟踪控制仿真效果比PID控制器略有进步,跟踪精度有所提高,但还是存在不可避免的局部震荡、超调等问题。例如:横坐标t=100~200 s间的超调会引起超速制动;横坐标t=300~400 s间的超调也比较大;其他地方也普遍存在速度波动。
3.2 牵引力前馈环节
列车的大滞后特性是控制系统实现高品质跟踪控制的重要障碍。在前期进行目标速度曲线规划时,后台程序已经按照数学模型对运行过程进行了仿真计算,理论上每一个计算步长内的最佳牵引力已经计算出来了,只是因为模型精度等问题,会与实际值有一定误差。本文在加载控制输入(目标速度曲线,图10中的Speed_TV)时,将后台程序存储的牵引力一并加载(图10中左上角的F),作为控制器的前馈,仿真效果如图11所示。
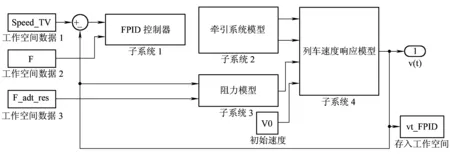
图10 带牵引力前馈环节的FPID控制器模型结构图
对比图9和图11可以发现,采用前馈环节的FPID控制器可以在一定程度上缓解列车系统的大滞后问题,但仍然无法在保证响应速度的同时很好地控制超调量,也没能对局部低限速区段的“撞线”问题进行有效解决。
控制器的超调量与响应速度在某种程度上是一对相互矛盾的关系,Kp较大则响应速度快,但超调量较大。通常情况下,适当的超调并无大碍,例如图11中横坐标t=300 s和t=1 200 s附近。但在t=100 s和200 s之后的低限速区段,若不能很好地控制超调量则会出现撞线,引起列车保护制动。

图11 带牵引力前馈的FPID控制器的速度跟踪效果仿真
当然,撞线问题可以通过加大限速安全裕量的方式解决。但这样的话会在一定程度上增加低速区段的通过时间,影响全局运行时间的配置,最终导致全局能耗的增加。这也反映出了节能性目标和安全性目标这一对矛盾关系的一个方面。若要在这一对矛盾关系中做到恰如其分,可以通过分别建立节能性和安全性目标关于限速安全裕量的代价函数,再以一定的权值构建加权目标函数,最后对目标函数求关于限速安全裕量的偏导,以求解目标函数的极小值和理想的限速安全裕量。本文采用一种不用增加限速安全裕量也可以避免低限速区段撞线制动问题的方法,即首先将控制过程分为多个模态,分别设计一个FPID控制器与之一一对应(见3.3节),并在输出与限速值非常接近的时候,在输出端按照接近程度分段对牵引力加以限制(见3.4节),以解决低限速区的撞线问题。
3.3 MMFPID控制器
列车运行过程从牵引系统的工作状态上来看具有一定的阶段性特征。现有理论通常是将理想化的列车节能运行分为加速、匀速、惰行、制动四种模态[3,4,7]。考虑到生产现场的实际情况,列车在启动阶段往往会有一段短距离的低速运行,直到车尾也平稳移动起来才能切换到加速模态。因此,本文在列车启动阶段增加了一个启动模态。另外,列车的制动过程也可以分为再生制动、空气制动、联合制动等不同模式。再生制动因其可以在制动过程中将列车动能转化为电能回馈给电网,近两年来被越来越广泛地采用。再生制动在低速阶段存在制动力不足的问题,准确的停车控制往往靠联合制动。因此,本文将制动模态分为再生制动和联合制动两个模态。不同模态下列车运行对控制器的性能要求也有一定的差异性。例如,列车在启动模态下从限制车钩力的角度控制列车缓慢启动即可,其他基本不需要太多的控制;加速模态要在尽量保持最大牵引力的同时,防止加速-匀速模态切换点的超调问题;匀速模态的关键任务是快速稳定跟踪速度输入;惰行模态需要重点关注的是最优惰行关系的动态调整和惰行-制动模态切换点的准确定位;再生制动模态主要是关注剩余计划运行时分的充分利用;联合制动模态只需要关注准确停车即可。列车在途中运行期间,往往主要是在加速、匀速、惰行三种模态之间切换。
针对各个模态的运行特征,本文分别设置了6个FPID子控制器构成组合控制器,每一个子控制器根据对应模态对控制器的性能要求在模糊规则和参数设计上因地制宜,灵活设置。可以较好地回避控制器设计过程中不同要素的限制与平衡。所有控制器由一个调度模块进行统一协调,同一时刻仅有一个控制器工作。MMFPID控制系统模型结构图如图12、图13所示。
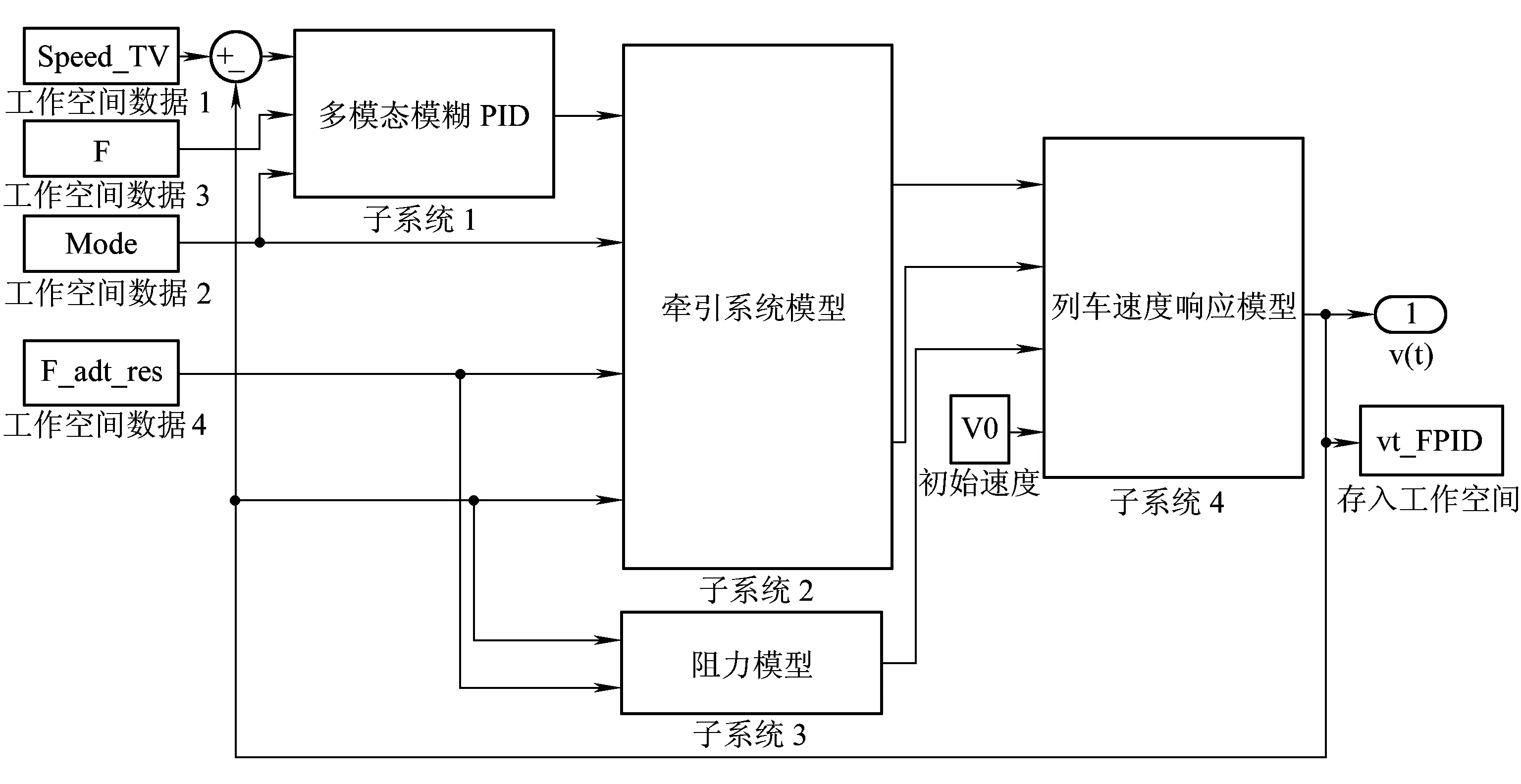
图12 MMFPID控制系统模型结构图

图13 MMFPID模块内部结构图
3.4 输出限幅
经过模态划分以后,控制系统还是没能彻底解决超调量引起的撞线制动问题,但已经为问题的解决提供了很好的操作空间。
本文在图12中的列车模型模块的输出做了防止撞线的输出限制。当控制器检测到输出与限速值非常接近时,按接近程度对牵引力进行不同程度的输出限制,在不影响整体跟踪控制效果的同时,有效防止局部超调。这也充分体现了MMFPID控制的优点,可以比较容易实现局部细节的调整。采用带牵引力前馈和输出限幅的MMFPID控制系统的速度跟踪控制效果如图14所示。
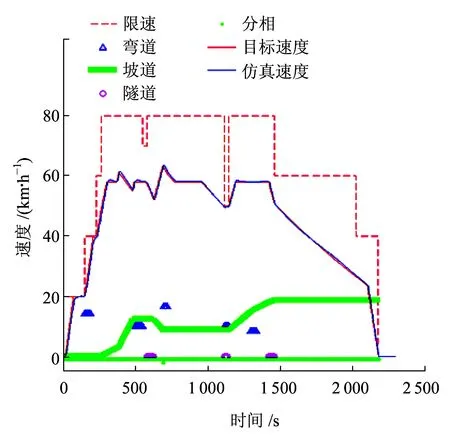
图14 带牵引力前馈和输出限幅的MMFPID控制系统的速度跟踪控制效果仿真
4 对比分析
为了对比说明MMFPID的性能,本文分别采用目前在役列车应用最为广泛的PID控制和列车运行控制领域既有的模糊控制按照相同的实验条件进行速度跟踪控制对比仿真。
4.1 PID控制器
PID/PI控制是目前应用最为广泛的经典算法,在我们日常能接触到的控制器中,有超过九成是采用的PID控制算法。
本文按照PID算法对图11中的控制器模型进行重新设计,并取消了牵引力前馈模块,构建了基于经典PID控制器的控制系统模型。通过前文中搭建的如图4、图5所示的软件仿真平台,对PID控制系统进行了速度跟踪控制效果仿真,仿真效果如图15所示。
图15 经典PID的控制器的速度跟踪控制效果仿真
通过图15可以看出,PID控制的总体效果比本文提出的带牵引力前馈和输出限幅的MMFPID要相距甚远,只能基本实现对输入速度的大致跟踪。特别是会在局部线路条件复杂的区段产生比较大的误差。例如:在t=500~600 s的区间,列车刚驶出陡坡,随后遇到弯道和隧道相叠加的工况,车速出现了暂时性地较大偏离。
4.2 模糊控制器
如3.1节所述,模糊控制对被控对象不需要精确建模,比较适合对具有非线性、多约束、多目标、时变等特性的复杂系统的控制。本文基于经典的TS模糊控制器重新对4.1节的控制器进行了设计。其中,模糊规则见表4。新系统在如图4和图5所示的软件仿真平台中的速度跟踪控制仿真效果如图16所示。

表4 模糊控制器模糊规则(Kp)
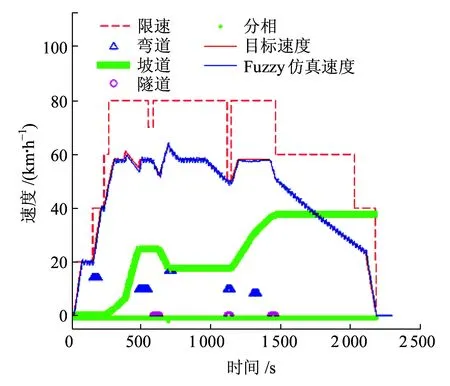
图16 经典模糊控制器的速度跟踪控制效果仿真
由图16可以看出,模糊控制的优点是对各种路况的适应程度都差不多,误差范围比较一致。缺点是即使在例如t=750~900 s之间的平直道上也很难精确地收敛于目标速度值,而是在一定的误差范围内持续震荡。单纯地采用模糊控制的速度控制效果与本文提出的带牵引力前馈和输出限幅的MMFPID相距甚远。
从上述对比案例的分析可以看出,将PID控制对目标速度的收敛性优点和模糊控制对各种线路条件的鲁棒性优点相结合形成的FPID是解决列车运行控制较为理想的控制手段。本文在FPID的基础上采用了多模态划分、牵引力前馈、输出限幅的组合控制策略,收到了如图14所示的速度跟踪控制效果,且计算速度快,能够满足货运列车在线实时控制的性能要求。
5 结论
本文在前期关于列车节能运行的目标速度曲线优化研究[21]的基础上,围绕货运列车的速度跟踪控制问题,针对列车系统大滞后、多目标、多约束的特点,展开控制器的设计研究。在PID、FPID的基础上,根据被控对象的工况特征,将列车运行过程分为6种工作模态,提出MMFPID控制方法,针对列车运行过程中的每一种工作模态分别设计控制器,从而实现更为精细的控制效果。为了应对列车系统大滞后的问题,采用牵引力前馈,较大地提升了控制器的动态性能。为解决车速超调在低限速区段引起列车撞线制动问题,采用输出限幅的策略。仿真结果表明,带牵引力前馈和输出限幅的MMFPID具有满意的控制效果,且在局部细节的针对性处理方面仍有潜力可挖。
参考文献:
[1]SIDELNIKOV V.Computation of Optimal Controls of a Railroad Locomotive[J].Proceedings of State Railway Research Institute,1965,6(2):52-58.
[2]MILROY I P.Aspect of Automatic Train Control[D].Loughborough:Loughborough University,1980.
[3]HOWLETT P G,PUDNEY P J.Energy-efficient Train Control[M].London:Springer-Verlag London Limited,1995.
[4]KHMELNITSKY E.On an Optimal Control Problem of Train Operation[J].Automatic Control,IEEE Transactions on,2000,45(7):1 257-1 266.
[5]YASUNOBU S,MIYAMOTO S,IHARA H.A Fuzzy Control for Train Automatic Stop Control[J].Transactions of the Society of Instrument and Control Engineers,1983,19(11):870-880.
[6]CHENG J X,HOWLETT P G.A Note on the Calculation of Optimal Strategies for the Minimization of Fuel Consumption in the Control of Trains[J].Automatic Control,IEEE Transactions on,1993,38(11):1 730-1 734.
[7]LIU R,GOLOVICHER I M.Energy-efficient Operation of Rail Vehicles[J].Fransportation Research Part A:Policy and Practice,2003,37(10):917-931.
[8]CHANG C S,SIM S S.Optimising Train Movements Through Coast Control Using Genetic Algorithms[J].Electric Power Applications,1997,144(1):65-73.
[9]WONG K K,HO T K.Dynamic Coast Control of Train Movement with Genetic Algorithm[J].International Journal of Systems Science,2004,35(13/14):835-846.
[10]YASUNOBU S,MIYAMOTO S.Automatic Train Operation System by Predictive Fuzzy Control[J].Industrial Applications of Fuzzy Control,1985,1(18):1-18.
[11]SICRE C,CUCALA A P,Fernández-Cardador A.Real Time Regulation of Efficient Driving of High Speed Trains Based on a Genetic Algorithm and a Fuzzy Model of Manual Driving[J].Engineering Applications of Artificial Intelligence,2014,29:79-92.
[12]LU S F,HILLMANSEN S,HO T K,et al.Single-train Trajectory Optimization[J].IEEE Transactions on Intelligent Transportation,2013,14(2):43-50.
[13]IANNUZZI D,TRICOLI P.Speed-based State-of-charge Tracking Control for Metro Trains with Onboard Supercapacitors[J].Power Electronics,IEEE Transactions on,2012,27(4):2 129-2 140.
[14]MIYOSHI M,TAKEBA T,MIYATAKE M.Development of an Energy Efficient Train Traffic Control System for Saving Electricity[C]//Thirteenth International Conference on Design and Operation in Railway Engineering,2012.
[15] JIA L M,ZHANG X D.Distributed Intelligent Railway Traffic Control:a Fuzzy-decisionmaking-based Approach[J].Engineering Applications of Artificial Intelligence,1994,7(3):311-319.
[16]余进,何正友,钱清泉,等.列车运行过程的自适应模糊控制[J].铁道学报,2010,32(4):44-49.
YU Jin,HE Zhengyou,QIAN Qingquan,et al.Adaptive Fuzzy Control of Train Operation[J].Journal of the China Railway Society,2010,32(4):44-49.
[17]唐海川,王青元,冯晓云.地铁列车追踪运行的节能控制与分析[J].铁道学报,2015,37(1):37-43.
TANG Haichuan,WANG Qingyuan,FENG Xiaoyun.Energy Saving Control of Metro Train Tracing Operation[J].Journal of the China Railway Society,2015,37(1):37-43.
[18]BAI Y,HO T K,MAO B,et al.Energy-efficient Locomotive Operation for Chinese Mainline Railways by Fuzzy Predictive Control[J].Intelligent Transportation Systems,IEEE Transactions on,2014,15(3):938-948.
[19]朱金陵,李会超,王青元,等.列车节能控制的优化分析[J].中国铁道科学,2008,29(2):104-108.
ZHU Jinling,LI Huichao,WANG Qingyuan,et al.Optimization Analysis on the Energy Saving Control for Trains[J].China Railway Science,2008,29(2):104-108.
[20]YIN J,CHEN D,LI Y.Smart Train Operation Algorithms Based on Expert Knowledge and Ensemble CART for the Electric Locomotive[J].Knowledge-based Systems,2016,92:78-91.
[21]杨杰,贾利民,卢少锋,等.电力牵引的货运列车节能运行研究(一):目标速度曲线优化[J].铁道学报,2016,38(4):22-31.
YANG Jie,JIA Limin,LU Shaofeng,et al.Energy-efficient Operation of Electric Freight Trains-Part Ⅰ:Speed Profile Optimization[J].Journal of the China Railway Society,2016,38(4):22-31.
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
哈尔滨铁道科技(2020年3期)2021-01-18
铁道通信信号(2020年1期)2020-09-21
电子制作(2019年16期)2019-09-27
铁道通信信号(2018年10期)2018-12-06
科技创新与应用(2017年26期)2017-09-12
中学生数理化·高一版(2016年4期)2016-11-19
电子制作(2016年21期)2016-05-17
科技与创新(2016年6期)2016-04-21
通信电源技术(2016年5期)2016-03-22