
基于智能结构模型的机器人轨迹跟踪控制研究
2016-05-09 02:16王庆龙李秀娟合肥学院机器视觉与智能控制实验室安徽合肥230106
安徽工程大学学报 2016年1期
刘 伟,王庆龙,李秀娟,李 瑶(合肥学院机器视觉与智能控制实验室,安徽合肥 230106)
基于智能结构模型的机器人轨迹跟踪控制研究
刘 伟,王庆龙,李秀娟,李 瑶
(合肥学院机器视觉与智能控制实验室,安徽合肥 230106)
摘要:针对动力学模型描述非完整移动机器人轨迹跟踪问题,从智能特征建模和传统控制理论相结合的思想出发,提出一种两层三段的智能结构控制模型,将主要研究目标从跟踪控制的数学模型转变为运动特征模型中定性与定量结合的知识模型.系统分为决策、执行两个层次,采用有限状态机进行层次间任务转换,建立基于仿人经验的模糊PID算法进行在线的控制参数调整.满足了复杂多任务的移动机器人轨迹跟踪要求,同时实验表明该方法的有效性.
关 键 词:智能结构模型;轨迹跟踪;有限状态机;模糊PID
在很多实际应用中,需要轮式机器人快速精确跟踪指定轨迹,由于此类系统不存在光滑或连续的时不变静态状态反馈,能镇定在平衡点上,其控制较为困难.因此,轮式移动机器人的控制问题成为研究热点[1-6].针对受非完整约束轮式移动机器人轨迹跟踪的非线性系统控制问题,文献[2]提出了力矩计算法,对非线性补偿有一定的效果,但需要精确的数学模型;文献[3]采用神经网络控制器,可以克服系统的不确定项和无模型的干扰,但控制算法复杂,在线时间长;文献[4]采用自适应控制方法,对满足一定条件的参考轨迹可以实现全局渐进跟踪,但控制器的参数选择复杂、鲁棒性差;文献[5]对机器人运动学模型应用模糊控制,但模糊规则过多,算法过于复杂,实时性不好;文献[6]基于指数趋近律的滑模变结构控制方法,进行温室喷药移动机器人路径跟踪运动控制研究,但过于复杂且对象过于单一,难以应用于其他对象中.
针对四轮移动机器人的轨迹跟踪问题,提出了一种基于两层三段的智能控制模型,凭借有效地拟人智能活动机理以及人类驾车行为经验为先验知识,将智能控制和运动控制方法结合起来,解决轨迹跟踪过程中任务复杂、路径多样、控制过程的非线性问题,为一类复杂多任务非线性控制问题提供一条思路.
1 四轮移动机器人运动轨迹跟踪分析
二维工作空间的四轮机器人,四个轮子与地面相接触,近似为车体、车轮和地面都是刚体.两个前轮为方向轮,其指向可以与车体之间有一定的偏角;两个后轮为驱动轮,始终指向车体的正前方,与车体当前的速度方向保持一致.运动中的机器人运动学方程的建立如式(1)所示,机器人位姿误差微分方程如式(2)所示,控制律采用式(3)[7].


式中,x、y、θ分别表示参考点的全局坐标和机器人的航向角;L近似表示前后轮两个轴间的距离;ϕ表示方向角,即车的前轮偏角;v为机器人的速度;ω为角速度分别代表位姿p的3个分量的速度;pr=(xr,yr,θr)为目标位姿;Pe=(xe,ye,θe)T定义为位姿误差;vr,ωr为机器人控制输出的参考速度和角速度;q是控制律;Kx、Ky、Kθ分别是控制器的比例系数.
感知、规划和执行是机器人学的三基元.传统单一参数的控制律很难适应和处理不同任务以跟踪变化复杂的轨迹[8-9].在轨迹跟踪过程中,往往需要在线确定或变换驱动控制策略以更好地完成任务.其任务结构如图1所示.由图1可知,系统包括路径信息的提取与分析、机器人位姿分析、意外防撞检测与控制、速度反馈与控制、信息处理与控制策略选择.同时,系统设计必须满足跟踪的实时性和可靠性,考虑到识别与控制过程的灵活性和适应性以及实现目标模式灵活实时跟踪控制策略,以适应结构化或非结构化、熟悉或不熟悉的环境,自主地执行监控任务.

图1 移动机器人轨迹跟踪系统的任务结构
2 基于两层三段智能控制模型的机器人跟踪控制系统
2.1 两层三段智能控制模型
针对机器人跟踪控制系统提出一种智能控制的认知框架如图2所示.由图2可知,系统由决策层及执行层构成.决策层完成控制方案选择及任务调度,执行层完成控制功能实现,是自顶向下、分层式、推理型的控制结构.每一层都有传感器信息处理、任务分解和执行输出3个部分.
决策层(由MRA,KBA,CRA构成)面向机器人的状态决策问题.通过监测器MRA得到机器人的当前状态与路径特征,根据知识库KBA先验知识,推理决策出机器人的输出状态策略方案.
执行层(由MRB,KBB,CRB构成)执行不同控制策略下的动作.监测器MRB根据决策层输出的控制方案提取需要的模式信息,根据知识基KBB提取相应的控制参数,最终输出控制策略.
对决策层和执行层均划分为三段过程.分为输入信息的计算智能识别、多模式与多模态的定性推理判断、输出结果的定量分析计算三段互耦合结构.
2.2 基于两层三段智能控制模型的机器人轨迹跟踪控制系统
(1)决策层.根据感知器输出的当前状态特征和执行级的控制结果进行状态转换和任务分配,完成输入协调器信息获取和机器人状态转换判断,三段的具体功能如下:
监测器.根据当前任务要求和传感器输入信息以及执行层状态反馈的状态信息,判断机器人处于何种状态并送入知识基.
知识基.根据监测器及控制器的输出实现机器人状态转移和控制策略的选择.机器人轨迹跟踪过程中
的状态是一个有限元,仿人驾车经验将其过程定义为5种状态,利用有限状态机进行机器人任务调度和状态转换的快速实现.

图2 两层三段控制模型结构
机器人轨迹跟踪系统决策层知识基中,有限状态自动机M的构造可设为一个5元组q0,F),其中,Q为移动机器人的状态,定义为{开始检测,直道运行,一般弯道运行,急弯运行,停止{开始信号,直道信号,位姿偏差在阈值之内,位姿偏差超过阈值速度较低,位姿偏差超过阈值速度较高,停止信号};δ为状态转移函数,如表1所示;q0={开始检测};F={停止}.
控制器.决策层控制器负责将相应的执行命令发送至感知层相应的传感器.

表1 有限状态机状态转移函数表
(2)执行层.进行具体计算,根据机器人在跟踪过程中的5个状态,实时将机器人的状态反馈给决策层,输出控制命令至控制器进行路径跟踪,控制器进行具体实施,三段的具体功能如下:
监测器.通过传感器计算当前的路径和机器人位姿信息,通过并把结果送入知识基进行判断.
知识基.仿人驾车的控制思想,建立模糊推理进行控制器的参数整定,并输出具体控制量至控制器.人具有智能推理功能,驾驶汽车时可以轻松地完成各种控制.在智能推理中,人的潜意识有某种规则在指导,当人驾驶汽车跟踪附近路面上的一条车道线时,通常是衡量车体与参考路径段的横向距离以及它们所处方向的夹角,而这种衡量是以一种模糊的概念给出的,如“距离比较大,角度很小”等.机器人在不同状态下,坐标误差和航向偏差对输出的影响程度不同,输出的增益也不应固定不变,需要在线调整控制策略及比例系数,仿人经验得出如下规则:
①在机器人速度较低的情况下,有偏差存在时输出的方向角调整应该较小;在速度较高的情况下,方向角调整应该较大.
②当机器人在直线上行使时弱化方向角的调整,允许适当的偏离;只有当偏离达到一定的距离时,再进行校正.
③当机器人在“S”道上行使时,弱化方向角的调整,使得机器人在“S”道上能够近似地跟踪圆弧的弦;当“S”道上的圆弧半径较大时候,机器人的轨迹近似为直线.
④当路径弯道角度很大时,要能够给出较大的方向角的调整值,使得机器人过弯时更为流畅.
基于上述驾驶的经验,同时将构成的模糊控制器置于控制系统中进行实验仿真.观察仿真结果,适当地调整控制规则以达到需要的控制要求,得出模糊控制规则表如表2所示.
控制器.将知识基的判断结果转换为可执行的命令,从而控制感知器,并把当前状态及识别结果反馈至决策层.基于智能结构模型的移动机器人轨迹跟踪控制器可以使系统具有控制灵活、响应迅速、控制精度高、鲁棒性强的优点.被控过程参数发生变化时,控制系统仍然保持较好的适应能力和鲁棒性.

表2 模糊控制规则表
3 实验与结果分析
3.1 仿真结果及分析
利用MATLAB对不同的参考路径和不同的参考输入分别进行仿真.其中,控制器的采样周期设为T =0.1s.对不同轨迹的跟踪问题进行仿真,结果及分析如下:
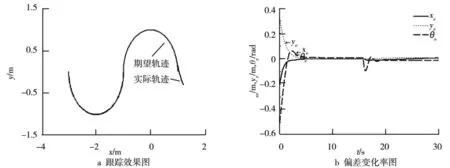
图3 不同参数的S型轨迹跟踪效果

图4 智能结构控制器的S型轨迹跟踪效果
(2)同样跟踪轨迹,机器人初始位置过程进行分析,得到在前180°和后180°的跟踪过程中系统采用了不同的参数,因此,控制效果较传统控制方法好.,采用仿人模糊控制规则,结果如图5所示.从图5可以看出,无论初始条件如何变化,在存在较大误差情况和设计控制器作用下,跟踪误差均能快速收敛,反馈跟踪控制系统具有良好的轨迹跟踪效果和全局渐近稳定特性.
(3)大误差轨迹跟踪参考轨迹为椭圆、机器人初始位置分别为

图5 大误差轨迹跟踪效果
3.2 智能车竞赛平台实验
为进一步探讨智能控制结构模型在移动机器人轨迹跟踪中的应用效果,利用智能车竞赛平台对算法进行移植验证.实验中智能车采用摄像头作为路径信号采集,以SX1216位单片机作为处理器,舵机进行航向角控制,直流电机为速度控制,以室内铺白底板上粘黑胶带制出各种形状为参考路径,其总长度约为50m.通过对摄像头采集信号进行处理,找出智能车位置与参考路径的误差,采用传统PID控制方法和智能结构模型控制方法进行对比,各跑10次.结果发现,智能车在各种参考轨迹下,基于智能结构控制模型的机器人在轨迹跟踪过程平均耗时30s,传统PID耗时约35s;本算法智能车偏离路径2次,传统PID偏离4次.由仿真实验可知,智能结构控制方法在机器人轨迹跟踪中可有效提高系统的响应速度和稳定性.
4 结论
从智能特征建模和传统控制理论相结合的思想出发,提出一种两层三段式的智能控制模型.针对轮式移动机器人的轨迹跟踪问题,因仿人思维模式把复杂任务系统分解为执行、决策两个层次,同时分为三个阶段分别处理不同任务.研究的主要目标不是控制对象的数学模型,而是机器人轨迹跟踪过程中运动特征模型的定性与定量结合的知识模型,解决了移动机器人轨迹跟踪过程任务复杂、路径多样问题.通过有限状态机的建立,实现决策层中复杂问题分解后的状态转变,通过仿人模糊PID实现具体控制算法的参数整定.通过仿真实验表明,该模型可以快速平滑地实现移动机器人轨迹跟踪控制,系统结构简单、实时性好,具有工程应用价值.
参考文献:
[1] D A Perez,W M Melendez,J Guzman,et al.Fuzzy logic based speed planning for autonomous navigation under velocity field control[C]//IEEE Int Conf on Mechatronics,Spanish:HEEE,2009:14-17.
[2] P Evangelos,P John.Planning and model-based control for mobile manipulators[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems,USA:IEEE,2000:1 810-1 815.
[3] M Ghatee,A Mohades.Motion planning in order to optimize the length and clearance applying a hopfield neural network [J].Expert Systems with Applications,2009,36:4 688-4 695.
[4] 王玉华,于双和,杜佳璐,等.不确定非完整移动机器人的自适应迷糊控制[J].系统仿真学报,2009,21(2):469-473.
[5] D Shen,G S Chen,J J Cruz,et al.A game theoretic data fusion aided path planning approach for cooperative UAV ISR [C]//IEEE Int Conf on Aerospace,USA:HEEE,2008:1-9.
[6] 牛雪梅,高国琴,周海燕,等.基于滑模变结构控制的温室喷药移动机器人路径跟踪[J].农业工程学报,2013(2):351-357.
[7] 许国瑞,崔天时,李晓莉.农业机器人行走方向识别及仿真[J].农机化研究,2013,35(2):423-427
[8] 王玉华,余双和,田园,等.不确定非完整移动机器人的自适应模糊控制[J].系统仿真学报,2009,21(2):469-473.
[9] W Liu,J P Wang,C W Zhang.Research and design of mobile robot moving object tracking dystem on hierarchical control[C]//2010International Conference on Computer Application and System Modeling,ICCASM 2010Proceedings Taiyuan:HEEE,2010:1-5.
Tracking control of mobile robot based on intelligent structure model
LIU Wei,WANG Qing-long,LI Xiu-juan,LI Yao
(Intelligent Control and Compute Vision Lab,Hefei University,Hefei 230106,China)
Abstract:An intelligent control model structure of two-level-three-stage is presented on the basis of feature modeling and the theories of traditional controls.It is applied in the trajectory tracking system of mobile robot,which can be decomposed into two levels:decision and evaluation.The transferring manners based on finite-state-machine is defined in decision level,fuzzy PID based on prior knowledge is adopted in execution level.The focus emphasis of the research is transferred from the mathematic model of the object to the knowledge model that combines the qualitative judgment with quantitative calculate according to the characteristic of the moving object.The problem of complex tasks and diversiform trajectory can be solved through the model.The results of simulation and experiments showed that the structure is efficienct.
Key words:intelligent structure model;trajectory tracking;finite-state-machine;fuzzy PID
作者简介:刘 伟(1979-),男,安徽寿县人,副教授,博士.
基金项目:安徽省高校优秀人才基金资助项目(2013SQRL077ZD)
收稿日期:2015-08-21
文章编号:1672-2477(2016)01-0059-06
中图分类号:TP391
文献标识码:A
猜你喜欢
——股权结构的调节效应检验
运筹与管理(2022年6期)2022-07-15
北京航空航天大学学报(2022年6期)2022-07-02
财讯(2019年24期)2019-09-03
制造技术与机床(2017年3期)2017-06-23
智库理论与实践(2017年1期)2017-01-27
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
