
亚像素级的精确测量技术研究
2016-05-19 13:43吴剑峰
电脑知识与技术 2016年8期
吴剑峰

摘要:现代工业对测量的精度、测量的效率以及测量的自动化程度的要求越来越高,传统的测量技术很难达到这样的要求,如微小尺寸的测量。基于CCD成像的图像测量方法由于其非接触性、精确性、实时性等优势而被广泛的应用于精确测量中。该文从软件入手,改进图像处理的算法,利用亚像素的图像处理技术,即精度更高的亚像素边缘检测算法,来使图像的边缘定位更加精确,从而提高基于图像处理的入射角测量系统的测量精度。通过实验分析,表明亚像素图像处理测量误差比整像素图像处理测量误差小,均小于0.05,很好的提高了测量精确度。
关键词:图像处理;亚像素级;精确测量;CCD
中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2016)08-0191-02
随着社会的发展,工业生产对测量技术的要求也越来越高,专家预计,新世纪图像测量技术的发展趋势如下:测量精度进一步提高,从微米级向纳米级发展;使用在线测量代替线外测量,将实时测量信息用于过程控制,从而构造高精度、智能化动态系统。
总之,图像测量技术必然会向高精度化、高速化和高效率化方向发展,本文利用精度更高的亚像素边缘检测算法,来使图像的边缘定位更加精确,从而提高入射角测量系统的精度。
1测量系统基本原理
本文所设计的测量系统的是为了测量平行光入射角度,我们知道,在一个直角三角形中,如果知道了两个边长,就可以利用直角三角形的边与角的关系求出任意一个角度。
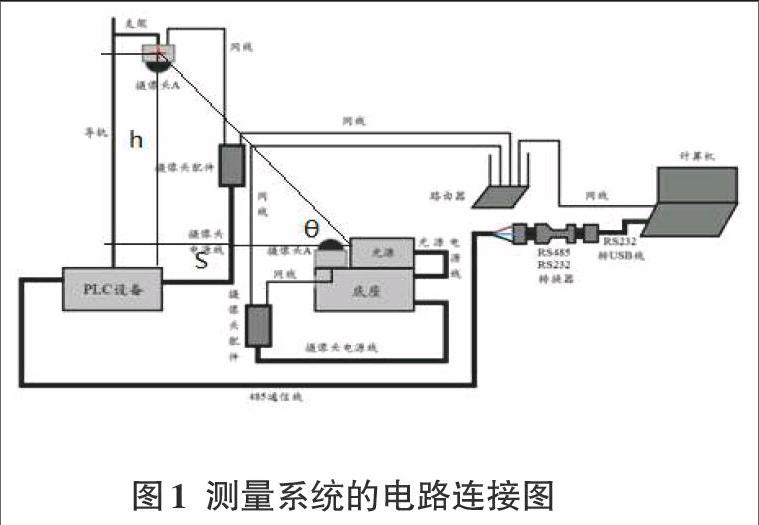
本文所设计的测量系统测量平行光入射角度的基本原理首先根据硬件设备构建一个如上图所示的三角测量系统,然后通过求出测量系统的两个长度,最后利用相关几何知识求出平行光入射角度。本文设计的整个测量系统的电路连接图如图1所示。利用摄像头B存储图像数据,对存储的图像数据进行处理可以得到摄像头A的位置,即可以直角边长h。并且通过找出摄像头A捕捉到光斑最大最强的那一帧图像时所处的位置,即平行光线直射的位置。有前面分析可知为了提高检测位置的精确度,就需要摄像头A捕捉到的光斑进行高精度的边缘检测。本文采用的是亚像素图像处理方法。
2亚像素概述
亚像素是指两个相邻的像素点之间的细分,也就是说把每一个像素点细分为多个更小的像素单元。亚像素的图像处理算法是把原始图像中的每个像素进行放大,比如放大了n×n倍(n=1,2,3…),那么就得到了n×n个亚像素点,然后根据算法计算出这n×n个亚像素点的灰度值,从而得到了一幅放大n×n倍的新的灰度图,我们称得到的新的灰度图为亚像素图像。
根据亚像素定位的原理我们可以得出亚像素定位技术的两个前提条件:第一,目标必须是由多个像素点组成的,并且要有特定的几何灰度值分布特征。第二,亚像素图像处理算法需要先用传统的图像处理方法进行预处理,从而得到整像素精度的处理结果,即粗定位,之后再进行亚像素图像处理,即细定位[6]。
3高斯拟合亚像素边缘检测算法
经过对需要检测的边缘精度、检测速度以及抗噪性能的考虑,本测量装置选择采用的是高斯拟合亚像素边缘检测算法,该方法定位边缘的精度高。
在梯度方向上的高斯曲线拟合亚像素定位的算法思想是针对M×N图像的,我们先在图像的边缘附近选择某一个领域U,例如领域U(P0,δ)={(x,y)|x=x0,|y-y0|<δ},假设H是在此领域内的某一矩阵,且表示在该领域内(i,j)点的灰度值,则可以求出灰度矩阵H=[h1;h2;h3;…;hi],i=1,2,3,…,N。
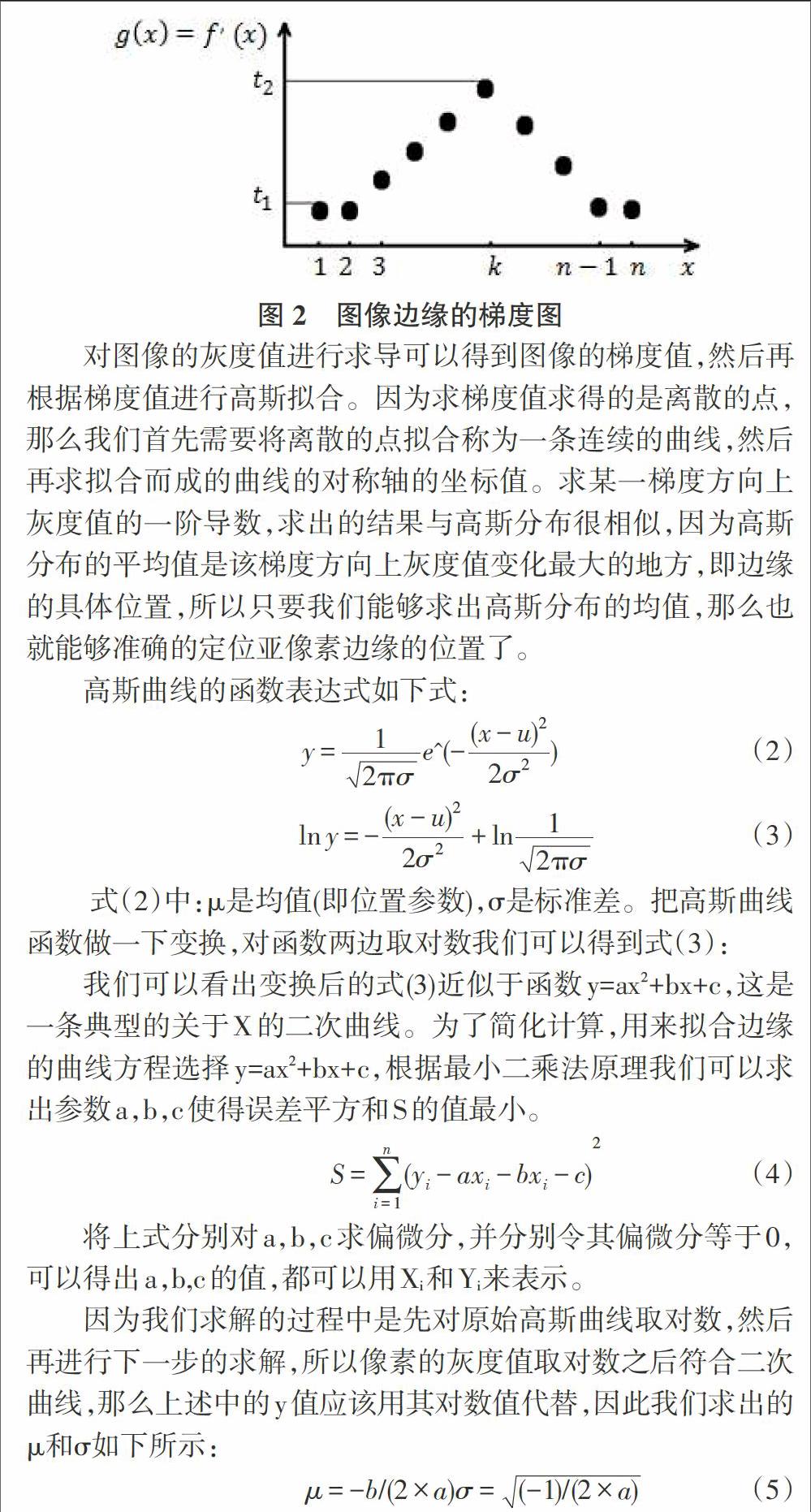
假设图像的灰度值的分布函数为y=f(x),那么t=f(x)即为灰度值梯度函数,利用f”(x)=0求出灰度值分布特征点。继而求出图像边缘的梯度图,如下图2,在特征点k一定会形成一个凸点,我们只要能求出梯度分布曲线的凸点就可以得到灰度分布特征点。
对图像的灰度值进行求导可以得到图像的梯度值,然后再根据梯度值进行高斯拟合。因为求梯度值求得的是离散的点,那么我们首先需要将离散的点拟合称为一条连续的曲线,然后再求拟合而成的曲线的对称轴的坐标值。求某一梯度方向上灰度值的一阶导数,求出的结果与高斯分布很相似,因为高斯分布的平均值是该梯度方向上灰度值变化最大的地方,即边缘的具体位置,所以只要我们能够求出高斯分布的均值,那么也就能够准确的定位亚像素边缘的位置了。
上式中的μ值即为亚像素值。因为通过同一个边缘点的不同方向上求出的亚像素精度上的边缘值均相等,也就是说图像在同一边缘处具有旋转不变性,所以我们对亚像素精度上的边缘值对选择的直线方向没有特别的要求,任何方向都可以选择。
4试验及误差分析
测量的关键一步就是准确找到摄像头A上红色十字的横线的上下边缘,为了准确地提取出边缘,首先要对原图像进行相应的预处理。边缘检测的处理流程包括:灰度化、二值化、边缘检测。实验中我们使用整像素级别的测量方法求下十字架和上十字架的中心位置的像素点的差值是171,通过实验我们可以求得每个像素点代表的实际长度是0.926cm,所以可以求出摄像头A距零点的位置为158.346cm,即h的值为158.346cm。因为s的值为2000cm,所以根据公式可求得光线的发射角度为:θ=arctan(h/s)=arctan(158.346/2000)=4.527o
此角度是我们利用测量系统测出的角度,而用全站仪测量距离然后计算出的角度为4.471o,两者相差0.056o,误差大于要求的误差0.05o。
利用亚像素边缘检测图中下十字的中心在653.403个像素位置上;上十字的中心在483.801个像素位置上。计算出:h=157.3341cm;θ=4.498°。此角度与全站仪所测距离计算出角度4.471o的差值为0.027o,误差小于要求的误差0.05o。
为了进一步验证亚像素图像处理提高测量系统精确度,我们进行了多次测量实验。结果如下表所示:
由上表可以看出,利用亚像素图像处理测量误差均比利用整像素图像处理的测量误差还要小。所以由实验可知,测量过程中利用亚像素图像处理很好地提高了测量精确度,满足了系统的测量误差要求。
5结束语
本文将亚像素边缘检测算法运用到平行光角度检测系统当中,来提高系统的测量精度。通过用全站仪测得的数据作为标准与测量系统测得的数据进行比较,表明亚像素图像处理测量误差比整像素图像处理测量误差小,说明利用亚像素图像处理很好地提高了测量精确度。
参考文献:
[1] 于起峰,陆宏伟,刘肖林.基于图像的精密测量与运动测量[M].北京:科学出版社,2002.
[2] 张永宏,胡德金,张凯,等.基于灰度矩的CCD图像亚像素边缘检测算法研究[J].光学技术,2004,5.30(6):693-698.
[3] 罗钧,侯艳,付丽.一种改进的灰度矩亚像素边缘检测算法[J].重庆大学学报,2008,5(5):549-552.
猜你喜欢
吉林电力(2022年1期)2022-11-10
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
通信电源技术(2018年5期)2018-08-23
电子测试(2018年6期)2018-05-09
电子测试(2017年11期)2017-12-15
湖北电力(2016年6期)2016-04-26
电气化铁道(2016年4期)2016-04-16
河南科技(2014年1期)2014-02-27
