
具有全向推力矢量的六旋翼无人机设计与建模
2016-05-23 09:31马振强董文瀚解武杰邵鹏杰
飞行力学 2016年2期
马振强, 董文瀚, 解武杰, 邵鹏杰
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
具有全向推力矢量的六旋翼无人机设计与建模
马振强, 董文瀚, 解武杰, 邵鹏杰
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
摘要:针对常规旋翼飞行器飞行速度小和加速飞行时不能保持机体水平姿态等问题,提出了一种具有全向推力矢量的六旋翼无人机设计方案;分析了推力矢量六旋翼在可倾转旋翼结构倾转不同角度时的飞行模式;建立了推力矢量六旋翼的动力学模型,并针对动力学模型设计了PID控制器;最后对动力学模型进行数值仿真验证。结果表明,所设计的推力矢量六旋翼能够悬停,且可以在定速飞行中保持飞行器的水平姿态。
关键词:六旋翼无人机; 推力矢量; 动力学模型; 飞行模式; PID控制
0引言
多旋翼飞行器是一种电动的、能够垂直起降的、可以遥控、自主飞行的飞行器,具有结构简单、飞行稳定、易于操控、低噪声、携带方便等特点,非常适合于执行中短距离的飞行任务[1-4]。关于常规旋翼飞行器设计和控制理论的研究已经比较成熟。文献[5]介绍了两种旋翼飞行器建模方法,并进行了仿真对比;文献[6]介绍了一种具有共轴双旋翼的新型的六旋翼结构;文献[7]使用PID+LQR方法对六旋翼飞行器进行控制,取得了较好的效果。
虽然对常规旋翼飞行器的研究已经比较成熟,但是由于其动力设计上的特点,常规旋翼飞行器的飞行速度和加速度较小,且加速飞行时,机体不能保持水平姿态。为克服上述问题,目前采用最多的是倾转旋翼方案。文献[8]设计了一种小型倾转旋翼飞行器,并进行了试飞;文献[9]用改进的叶元法和动量法建立了旋翼数模型,给出了旋翼下洗对机翼的影响。虽然倾转旋翼无人机可以很好地解决上述问题,但是其结构相当复杂,且安全性和稳定性较低。
本文提出的具有全向推力矢量的六旋翼飞行器可以在保持机体水平姿态下,通过可倾转旋翼绕两正交轴的旋转倾转一定角度,为飞行器提供任意方向的推力。
1具有全向推力矢量六旋翼的结构设计
推力矢量六旋翼飞行器在常规四旋翼飞行器的基础上,增加了一组可倾转的共轴双旋翼结构(见图1)。增加的共轴双旋翼结构可以绕电机支撑杆轴线旋转(见图2),支撑杆可以绕杆的中点旋转,两种倾转方式相结合,可以使此共轴双旋翼结构指向任意方向,给常规四旋翼增加推力矢量。推力矢量六旋翼外侧相邻的旋翼之间夹角为90°,分别将外侧四个旋翼编为1号、2号、3号和4号,中间旋翼分别编为5号和6号。

图1 全向推力矢量六旋翼飞行器Fig.1 The omni-directional thrust vector hexarotor UAV
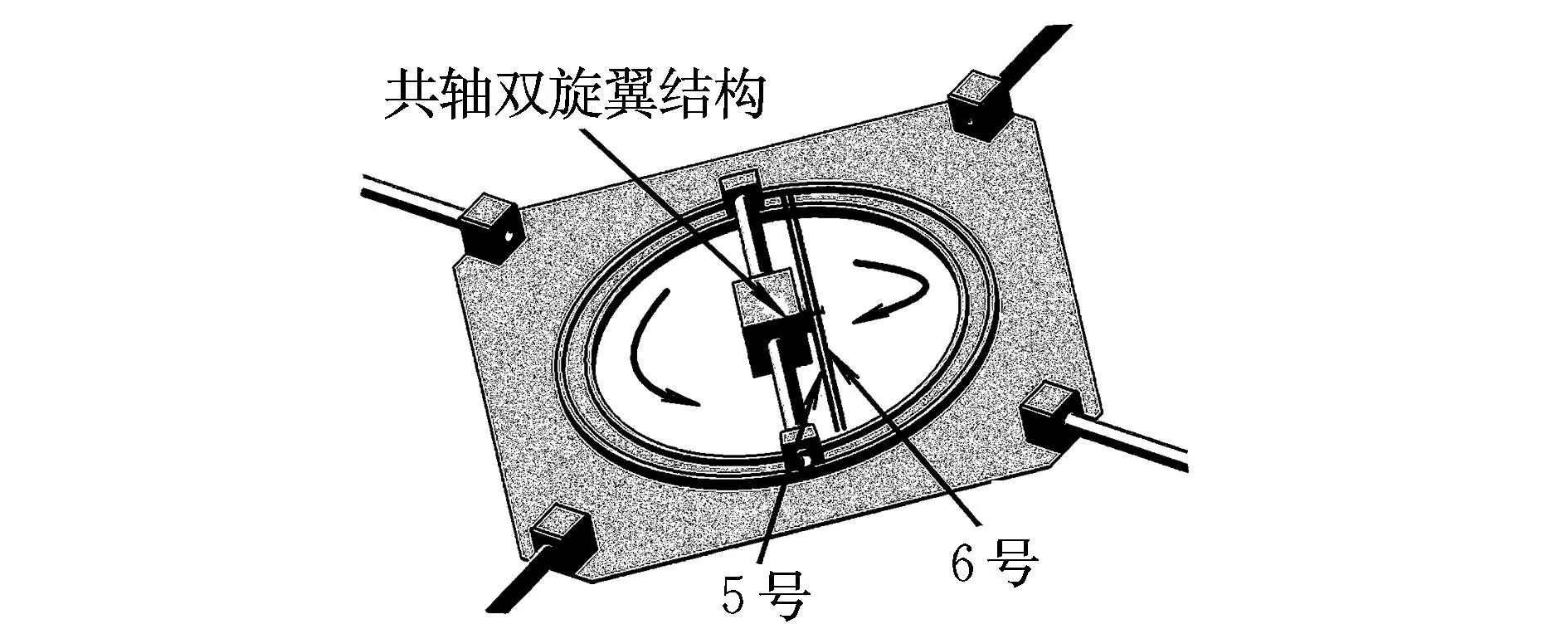
图2 倾转旋翼结构Fig.2 Structure of tilting rotor
2动力学建模
假设1:飞行器重心始终位于中心电机位置上。
假设2:中间旋翼结构倾转引起的转动惯量变化忽略不计。
文献[10]给出了从机体坐标系到惯性坐标系的方向余弦矩阵为:
(1)
式中:S为正弦函数sin的缩写;C为余弦函数cos的缩写;ψ,θ,φ分别为机体坐标系下的偏航角、俯仰角、滚转角。在机体坐标系下飞行器的推力为:
(2)
式中:α1为倾转旋翼机构绕y轴旋转的角度;α2为倾转旋翼机构绕z轴旋转的角度。根据FE=RFB,在惯性坐标系下飞行器的推力为:
FE=
(3)
考虑各个方向的阻力,由牛顿第二定律得:
在Docker镜像上传到镜像仓库之后,部署中心可在不同的运行环境下根据特定的镜像启动相应的Docker容器。为便于描述,将该容器称为“服务容器”,包含承载微服务的应用程序及其配置文件。
(4)
(5)

(6)
式中:U1为外侧四个旋翼在垂直方向上的控制输入;U2为可倾转旋翼的控制输入;U3为滚转运动的控制输入;U4为俯仰运动的控制输入;U5为偏航运动的控制输入;kt为拉力系数;kd为旋翼转速差转化成扭矩的扭矩系数。
结合式(2)、式(4)~式(6),可得推力矢量六旋翼动力学模型为:
(7a)
(7b)
式中:l为外侧相邻旋翼距离。
3飞行模式分析
具有全向推力矢量的六旋翼无人机飞行原理与常规四旋翼有相似之处,文献[12-13]对四旋翼的飞行原理进行了介绍。外侧4个旋翼的功能是保持飞行器最基本的飞行稳定,中间的可倾转旋翼转向相反,且可以倾转,主要作用有以下三点:一是为飞行器提供全向的推力矢量;二是增大飞行器的最大飞行速度和加速度;三是使飞行器在水平方向运动时,可以保持整个机体的水平状态。下面对可倾转旋翼指向不同角度时的运动模式进行分析(见图3)。
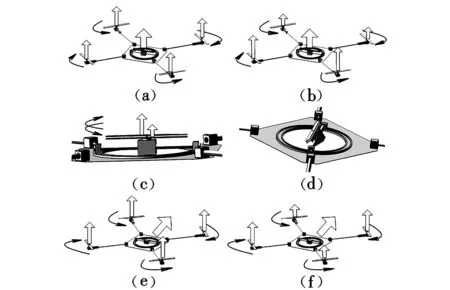
图3 飞行模式Fig.3 Flight patterns
当可倾转旋翼指向z轴正方向(α1=0°,α2=0°)时,如图3(a)所示,所有旋翼为飞行器提供向上的升力,在水平速度为零的条件下,当升力等于重力且竖直方向速度为零时,飞行器处于悬停状态;当升力小于重力时,飞行器产生向下的加速度;反之,飞行器产生向上的加速度。如图3(b)所示,当1号和2号旋翼提供的升力减少ΔF,而3号和4号旋翼提供的升力增加ΔF时,飞行器产生俯仰力矩,飞行器可以产生俯仰运动。如图3(c)所示,当中间旋翼速度差不为零时,飞行器即产生偏航力矩,使飞行器偏转航向。
当可倾转旋翼指向x轴正方向(α1=90°,α2=0°)时,如图3(e)所示,外侧4个旋翼为飞行器提供向上的升力,并要保持飞行器的稳定,倾转旋翼提供向x轴正方向的推力,可以增加飞行器x方向的加速度,使飞行器能在更短的时间内达到一定的速度,也可以在x轴方向达到更大的速度。常规六旋翼实现前向飞行是通过机体向前倾斜了小的角度,产生负的俯仰角,升力产生向前的分量,此分量是飞行器向前飞行的动力,前向推力较小,飞行速度和加速度都比较小,且六旋翼飞行器在飞行中不能保持机体的水平姿态,前向速度与垂直方向速度有耦合。推力矢量六旋翼飞行时只需将中间旋翼倾转向前即可。两个旋翼的全部推力都作为前向推力,使飞行器可以具有较大的前向速度。同时前向飞行不需要飞行器产生负的俯仰角,此时飞行器可以保持水平飞行姿态。如图3(f)所示,1号和3号、2号和4号旋翼转速相同,但1号和2号旋翼转速不同,即可产生偏航力矩,使飞行器产生偏航运动。
当倾转旋翼绕y轴旋转α1角度,绕z轴旋转α2角度(指向任意方向)时,如图3(d)所示,可倾转旋翼指向其他任意方向时,都可以在该方向上产生较大的推力,飞行方向可以向任意方向快速改变,比常规六旋翼有更好的机动性。当飞行器受到扰动产生滚转和俯仰角时,可以通过外侧4个旋翼调整飞行器姿态,使其稳定飞行。
4控制器设计及仿真
4.1控制器设计
通过定义U1,U2,U3,U4和U5,这个复杂的非线性、强耦合系统被分解成5个独立的控制通道。控制器设计分为内环控制和外环控制。内环回路是姿态控制回路,外环回路是位移控制回路。四旋翼双回路控制结构如图4所示。图中,Pr为期望位置;ψr为期望偏航角;θr为期望俯仰角;φr为期望欧拉角。
仿真所用飞行器的参数如表1所示。
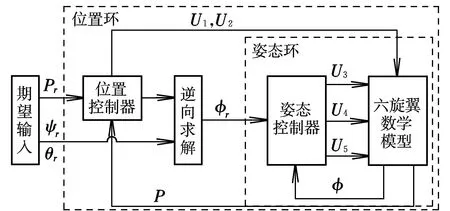
图4 控制系统结构Fig.4 Structure of control system

参数数值参数数值m/kg1.2625Iz/kg·m20.04975l/m0.642kt1.5e-05Ix/kg·m20.03151kd2.8e-07Iy/kg·m20.03152K0.05
倾转旋翼指向z轴正方向和指向x轴正方向是飞行器最常用的两种飞行模式,针对这两种飞行模式分别设计了PID控制器。PID控制是一种基于目标与实际的误差的反馈控制,PID控制器设计如图5所示。
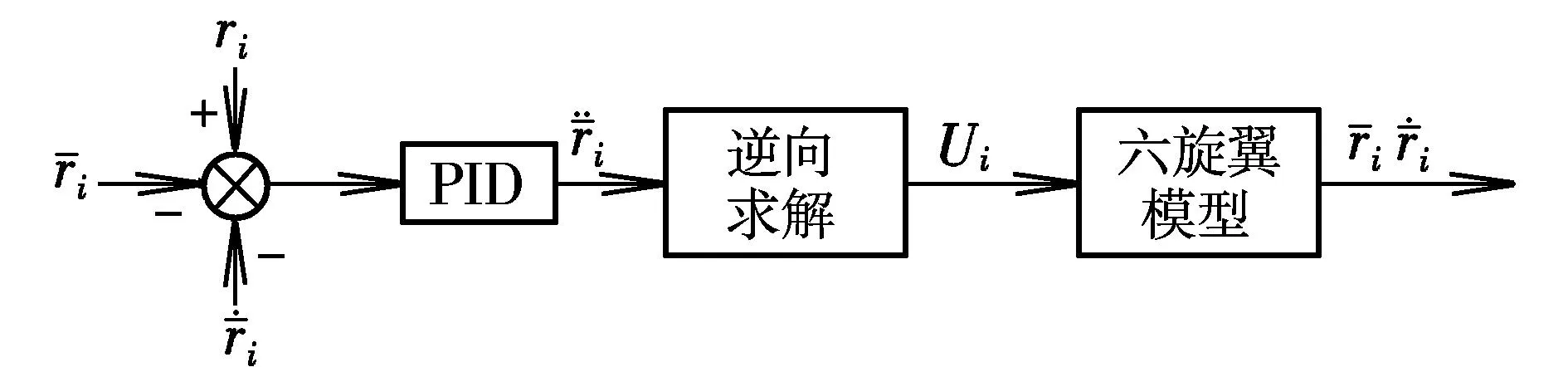
图5 PID控制器结构Fig.5 Structure of PID controller

(8)
其中:
A=Sα1Cα2CψCθ,B=Sα1Sα2CψSθSφ
C=CψSθCφ+SψSφ,D=-Sα1Cα2Sθ
E=Sα1Sα2CθSφ,F=Cα1CθCφ
4.2倾转旋翼指向z轴正方向
倾转旋翼指向z轴正方向时,对飞行器进行定点悬停控制仿真。控制器通过引入位置和姿态角误差,修正飞行器姿态和位置。飞行器从原点起飞,给定悬停位置坐标为(10,10,10)m。此状态下的PID控制器的具体参数如表2所示。飞行器可以从原点起飞,最终在较短时间内悬停于指定位置,且调节时间、超调量等动态性能较好,如图6~图8所示。
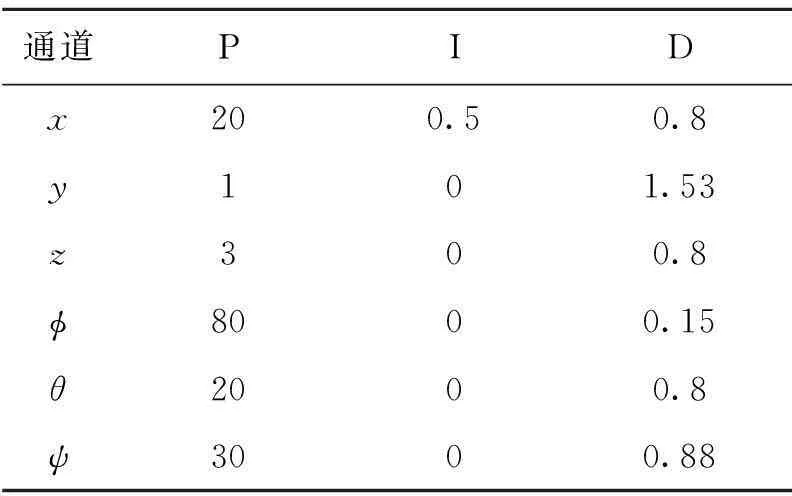
表2 PID控制器参数

图6 x方向位移变化Fig.6 Variations of displacement in x direction

图7 y方向位移变化Fig.7 Variations of displacement in y direction

图8 z方向位移变化Fig.8 Variations of displacement in z direction
4.3倾转旋翼指向x轴正方向
倾转旋翼指向x轴正方向时,对飞行器进行定速飞行控制仿真。飞行器从原点起飞,到达10 m高度后,以20 m/s的稳定速度向x正方向飞行。此状态下的PID控制器的参数如表3所示。位移和速度曲线如图9和图10所示。

表3 PID控制器参数
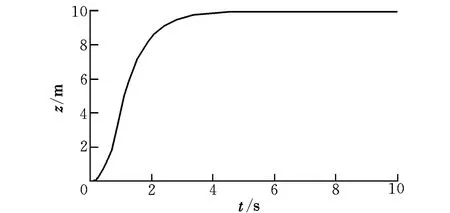
图9 z方向位移变化Fig.9 Variations of displacement in z direction

图10 x方向速度变化Fig.10 Variations of speed in x direction
由图可知,飞行器可以按照预定的状态稳定飞行,且调节时间和超调量等动态性能较好。
5结束语
针对常规旋翼飞行器飞行速度和加速度小、倾转旋翼飞行器结构复杂、安全性低等问题,设计了具有推力矢量的六旋翼飞行器。可倾转旋翼可以在飞行器保持机体水平姿态的情况下,为飞行器提供任意方向的推力,飞行器具有很强的机动性。建立了飞行器的动力学模型,并进行了仿真验证。仿真结果表明,在可倾转旋翼指向z轴正方向和x轴正方向时,飞行器可以稳定飞行。
参考文献:
[1]杨成顺,杨忠,许德智,等.新型六旋翼飞行器的轨迹跟踪控制[J].系统工程与电子技术,2012,34(10):2098-2105.
[2]聂博文,马宏绪,王剑,等.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-117.
[3]岳基隆,张庆杰,朱华勇.微小型四旋翼无人机研究进展及关键技术浅析[J].电光与控制,2010,17(10):46-52.
[4]Angel E,Rosas A.Path tracking control for an autonomous four rotor mini-helicopter[R].Canada:University of Calgary,2007.
[5]Rubio J D,Cruz J H P,Zamudio Z,et al.Comparison of two quadrotor dynamic models[J].IEEE Latin America Transactions,2014,12(4):531-537.
[6]张阳胜,刘荣.一种新型六旋翼飞行器的设计[J].机械与电子,2010(5):64-66.
[7]Salim N D,Derawi D,Abdullah S S,et al.PID plus LQR attitude control for hexarotor MAV[C]//IEEE International Conference on Industrial Technology (ICIT).Busan,Korea,2014:85-90.
[8]Song Yanguo,Wang Huanjin.Design of flight control system for a small unmanned tilt rotor aircraft[J].Chinese Journal of Aeronautics,2009,22(3):250-256.
[9]杨喜立,朱纪洪,黄兴李,等.倾转旋翼飞机建模与仿真[J].航空学报,2006,27(4):584-587.
[10]Li Jun,Li Yuntang.Dynamic analysis and PID control for a quadrotor[C]//Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation.Beijing,2011:573-578.
[11]刘晓杰.基于视觉的微小型四旋翼飞行器位姿估计研究与实现[D].长春:吉林大学,2009.
[12]黄依新.四旋翼飞行器姿态控制方法研究[D].成都:西南交通大学,2014.
[13]甄红涛,齐晓慧,夏明旗,等.四旋翼无人直升机飞行控制技术综述[J].飞行力学,2012,30(4):295-299.
(编辑:方春玲)
Design and modeling of an omni-directional thrust vector hexarotor UAV
MA Zhen-qiang, DONG Wen-han, XIE Wu-jie, SHAO Peng-jie
(Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China)
Abstract:In order to increase the flight speed of the conventional hexarotor UAV, meanwhile to keep horizontal attitude during the accelerated flight, a design scheme of an omni-directional vector thrust hexarotor UAV is proposed in this paper. The different flight modes, when the tilting rotor rotates to different angles, are analyzed. The dynamic model for the vector thrust hexarotor is established and the PID controller is designed for the model. The simulation results show that the designed vector thrust hexarotor UAV could keep hovering and maintain horizontal attitude in the flight at given speed.
Key words:hexarotor UAV; thrust vector; dynamic model; flight mode; PID control
作者简介:马振强(1991-),男,吉林辽源人,硕士研究生,研究方向为多旋翼建模、故障诊断与容错控制。
收稿日期:2015-07-21;
修订日期:2015-11-07; 网络出版时间:2016-01-10 14:09
中图分类号:V249.1
文献标识码:A
文章编号:1002-0853(2016)02-0032-05
猜你喜欢
内蒙古教育·职教版(2016年11期)2017-01-05
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
现代经济信息(2016年24期)2016-11-09
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年7期)2016-05-19
电脑知识与技术(2016年9期)2016-05-18
