
广义正交多项式在动载荷识别中的应用研究*
2016-06-30 07:11杨永国王万金
舰船电子工程 2016年6期
杨永国 王万金
(91550部队 大连 116023)
广义正交多项式在动载荷识别中的应用研究*
杨永国王万金
(91550部队大连116023)
摘要根据正交域理论,基于广义切比雪夫多项式建立了单自由度系统的动载荷识别模型,对已知参数的一般单自由度系统动力学模型进行了验证性的动载荷识别,结果表明该模型能够很好地对单自由度系统动载荷进行识别,可以通过增加多项式阶数降低拟合误差并提高精度。采用该模型对飞行器飞行试验单处测点进行了动载荷识别,结果可信度较高,对改进飞行器飞行试验方案和结构设计具有指导意义。
关键词正交多项式; 动载荷; 时域识别
Class NumberTP301
1引言
飞行器飞行试验过程中动载荷的识别对改进方案和结构设计具有非常重要意义,其是结构动力学响应分析的逆问题,可以通过建模技术和识别方法[1~2]两种途径实现。系统数学模型参数的识别是目前系统识别技术的侧重点,但在逆问题的分析中模型参数的应用仍然存在一些问题需要去解决。尽管较高精度的数学模型参数可以通过一些系统识别的方法获得,但误差一定程度上仍然存在,这将致使模型参数在模拟系统动态特性时存在一定的缺陷,导致逆过程的收敛性和稳定性等问题的出现,如果解决不好将会影响结果的精度。正交域理论在动载荷的识别方面有很好的应用,其识别结果较为稳定、收敛速度快且具有一定的抗干扰性,可以通过增加多项式的阶数来提高结果的精度[3]。考虑广义正交域理论的良好应用特点,文中通过定频信号模拟激励动载荷,应用一维切比雪夫广义加权正交多项式来解决一维连续分布动载荷的识别问题,采用单自由度系统动力学方程计算系统的加速度响应,结合应用广义正交多项式进行载荷识别的基本计算模型进行动载荷识别仿真,并将仿真识别结果和激励动载荷进行比对,验证上述动载荷识别在理论上的可行性,并将计算模型应用于飞行器满足单自由度系统的单处测点进行了动载荷识别,计算结果对飞行器飞行方案和结构设计具有一定的指导意义。
2切比雪夫多项式
由于正交多项式可以用级数逼近任意连续单值函数,将其用于动力学分析,可以获得比较简单有效的分析模型。考虑到切比雪夫广义正交多项式优良的特性,文中采用其来进行动载荷的识别研究,它是时域区间[0,s]上的广义正交多项式,前5项表达式[4~7]如下:
(1)

(2)
广义加权一维切比雪夫多项式可以很好地拟合一维函数,具有正交性和收敛较快的特点[3~4],通过增加多项式阶数可显著降低误差、提高拟合精度,能够满足实际分析需求。
3动载荷识别模型
考虑到上述切比雪夫多项式在函数拟合方面收敛较快,动力学系统的动载荷识别可以通过其来构造基本的计算模型,并用该模型来解决一维连续分布动载荷识别问题。
典型的单自由度系统动力学运动方程[8]为

(3)
(4)
将式(4)代入式(3),得
(5)
根据正交多项式的加权正交性原理,将式(5)两边同乘Ti(t)h(t)并在[0,T]上进行积分,可得:
maj+cbj+kdj=ejj=0,1,2,…,∞
(6)
其中,aj、bj、dj可通过下式求得
(7)

(8)
位移、加速度响应的正交多项式系数可以通过式(8)计算出,即:
(9)
(m[I]+c[Q]+k[P]){a}={e}
(10)
在已知系统加速度的情况下,式(10)给出了在正交多项式取有限阶次时的动载荷级数系数计算方法,动载荷的时间历程可以通过它进行识别。
4示例分析
4.1仿真信号识别
本节根据上文载荷识别的计算模型,结合仿真信号来验证模型的有效性。假定某单自由度系统质量为3kg,系统阻尼系数为0.02,系统刚度为0.37Nm2,仿真时间为1s,采样频率为500Hz,激励动载荷函数表达式为f(t)=20sin(2.1πt)+1。
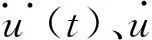
图1为系统的激励动载荷,图2为系统的加速度,通过式(3)求得的系统动载荷如图3所示,图4表示识别结果和原载荷的相对误差,这里切比雪夫多项式取前八项。
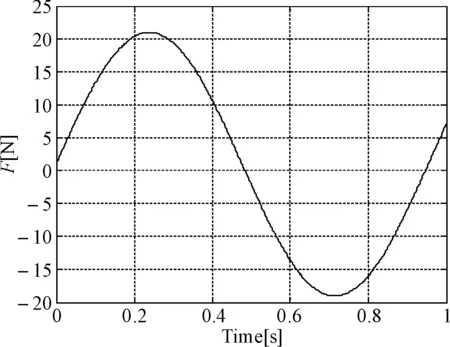
图1 激励动载荷
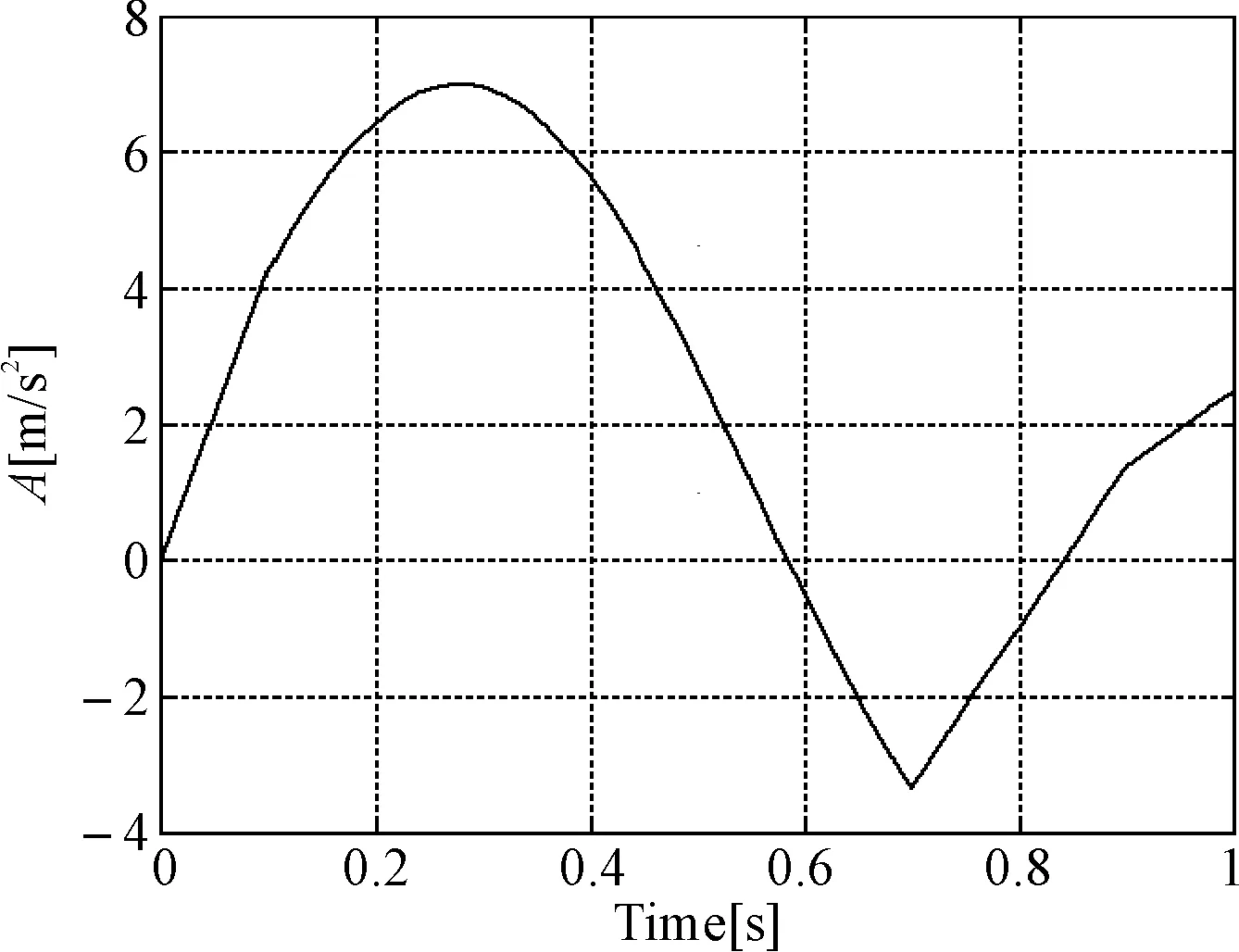
图2 系统加速度
图3 识别的动载荷
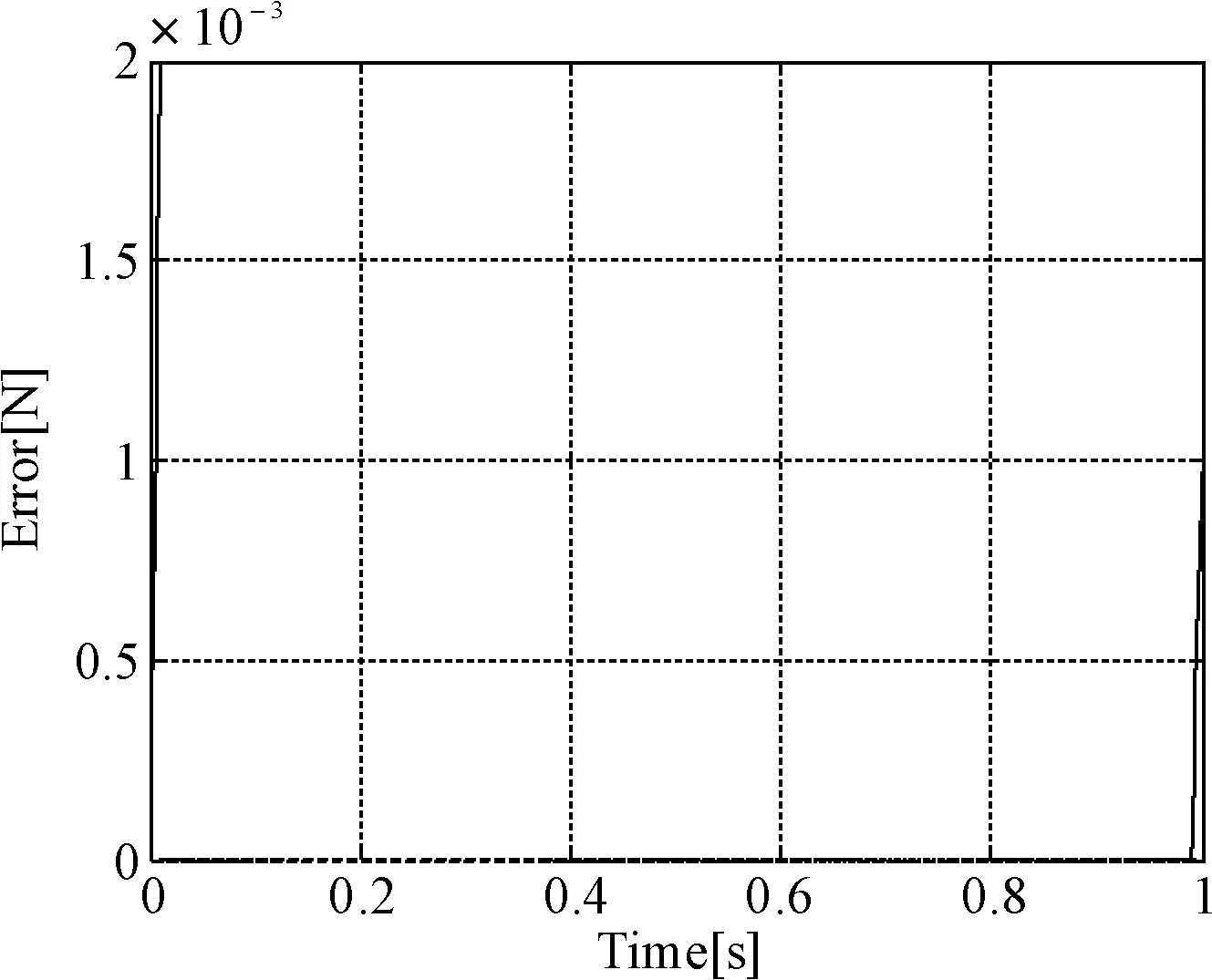
图4 动载荷相对误差
由识别结果可以看出,上述模型可以对单自由度系统动载荷进行很好的识别,且识别误差在时间区域边缘相对明显,这可以通过增加多项式阶数来降低拟合误差,提高拟合精度。
4.2实测信号识别
鉴于飞行器自身结构和材料特性,飞行段落的整体动载荷识别较为困难。本节只进行简单尝试,对其某处测点处的动载荷进行识别。假定单处测点满足单自由度系统,质量为3000kg,阻尼系数为0.03,刚度为0.42Nm2,测量时段为0.2s,采样频率为5000Hz,采用实测信号在测点处进行激励,并采集测点处一定时段内的振动加速度响应[9~10]。根据测点处的振动加速度响应(如图5所示)和上述方法进行载荷识别,识别值与在测点处输入值的对比参见图6,二者的相对误差参见图7,可见上述方法的识别精度是很高的,对于单测点可以达到预期要求。
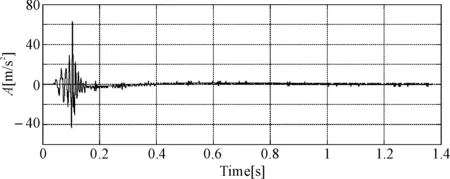
图5 测点处加速度响应
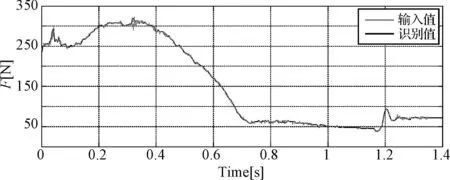
图6 载荷输入值与识别值对比
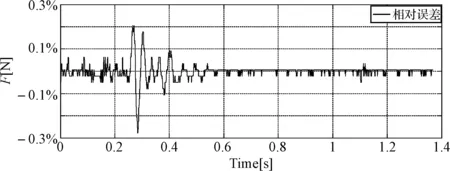
图7 载荷识别的相对误差
5结论
正交域理论在动载荷识别方面具有很广的应用,考虑其识别结果的稳定性和收敛较快的特点,文中应用一维广义正交切比雪夫多项式建立了动载荷识别模型,并采用该模型对已知动载荷激励函数的加速度响应进行动载荷识别,结果表明上述模型应用于一般单自由度系统动载荷识别是有效性的。在此基础上将识别模型应用于飞行器飞行试验单处测点的动载荷识别,识别结果精度可以通过增加多项式的阶数来提高且可信度较高,可应用于飞行器飞行试验结构分析方面。
参 考 文 献
[1] Kyung-Taek Yang, Youn-sik Park. Joint structural parameter identification using a subset of frequency response function measurements[J]. Mechanical System and Signal Processing,1993,7(6):509-530.
[2] H.Baruh and J.B.Boka. Modeling and identification of boundary conditions in flexible structures[J], The International Journal of Analytical and Experimental Modal Analysis,1993,8(2):107-117.
[3] 唐近秀.动态力识别的时域方法[J].大连工学院学报,1990,30(1):31-37.
[4] Rice L R.The approximation of functions [M].Reading Massachusetts:Addison-Wesley Pub Company,1964(1):65-90.
[5] 解延年.切比雪夫[J].数学通报,1987(1):42-44.
[6] 徐传胜.圣彼得堡数学学派的发展[J].科学技术哲学研究,2010,(5):82-87.
[7] 王竹溪,郭敦仁.特殊函数概论[M].北京:北京大学出版社,2004:121-135.
[8] 张方.动载荷识别技术研究及应用[D].南京:南京航空航天大学,1996:30-41.
[9] 张力,林建龙,项辉宇等.模态分析与实验[M].北京:清华大学出版社,2011:45-50.
[10] William T. Thomson, Marie Dillon Dahleh. Theory of Vibration with Applications[M]. Beijing:The tsinghua university press,2005:213-240.
Application of Generalized Orthogonal Polynomials in Dynamic Load Recognition
YANG YongguoWANG Wanjin
(No.91550 Troops of PLA, Dalian116023)
AbstractFor a single degree of freedom system dynamic load identification, based on the generalized field theory chebyshev orthogonal polynomials, a dynamic load recognition model is established, and then a single degree of freedom system dynamics model generally known parameters are validated dynamic nature load recognition simulation, and finally a single degree of freedom system to test the model aircraft measured at a single point constitute dynamic load are identified. The results show that the generalized chebyshev orthogonal polynomials recognition model based on dynamic load can be a good fit single degree of freedom system dynamic load identification problem. For specific questions, the degree of the polynomial fit can be increased to reduce error and improve the fitting accuracy, which has important application value.
Key Wordsorthogonal polynomials, dynamic load, time domain identification
*收稿日期:2015年12月7日,修回日期:2016年1月23日
作者简介:杨永国,男,高级工程师,研究方向:航天测控软件研发。王万金,男,硕士,工程师,研究方向:信号处理及电磁拓扑技术。
中图分类号TP301
DOI:10.3969/j.issn.1672-9730.2016.06.013
