
纯电动汽车与无级变速器匹配控制策略的建模与仿真
2016-07-15 03:28杨宝成赵海新张真忠
承德石油高等专科学校学报 2016年3期
杨宝成,赵海新,张真忠
(承德石油高等专科学校 汽车工程系,河北 承德 067000)
纯电动汽车与无级变速器匹配控制策略的建模与仿真
杨宝成,赵海新,张真忠
(承德石油高等专科学校 汽车工程系,河北承德067000)
摘要:为了更好地节约电动汽车电池能量、增加其续航里程及满足电动汽车在不同工况下的行驶要求。通过对机械电子式无级变速器的速比控制目标与要求进行分析,将驾驶员加速踏板的变化解释为瞬时的功率需求。利用MATLAB/Simulink和Cruise两种软件的各自优势,在MATLAB/Simulink环境中设计了一种经济性和动力性折衷的速比PID控制器以实现速比控制;在Cruise中搭建了整车模型,将Simulink中的模型以API形式导入并进行联合仿真分析。最后得出搭载EMCVT应用本文速比控制策略的电动汽车比搭载固定速比减速器的电动汽车加速时间短,爬坡能力更强,节约电池能量,续驶里程更长。
关键词:电动汽车;无级变速器;匹配控制;MATLAB与Cruise;建模与仿真
电动汽车以良好的环保效果、噪音低、热效率高、使用多种能源、机械结构和控制多样化等特点得到了广泛的关注和发展。传动系统及控制是电动汽车行驶中的主要执行结构,其传动效率及特性决定了汽车行驶的主要性能指标,它是电动汽车的重要部件。因此研发或完善能同时满足车辆行驶过程中的各种工况要求,并具有良好的耐用性、经济性、高效性等特点的传动方式显得尤为重要。而搭载无级变速器的纯电动汽车,由于无级变速器的传动比可以连续变化,从而使电动机在其最佳效率区工作,减少了蓄电池的电能消耗,增加了车辆的续航里程。然而要达到上述的目的,就需要对无级变速器的传动比进行合理的控制。
1电动汽车与EMCVT匹配控制策略
无级变速器控制系统就是要根据驾驶员对加速踏板和制动踏板等操作,使电动机与变速器之间达到设计的工作状态,使车辆的电动机输出功率和行驶阻力之间实现动态的最佳匹配,从而使车辆具有良好的经济性和动力性。装有EMCVT电动汽车的续航里程和动力性主要取决于下面两个条件[1]:
1)驾驶员采取动力性或者经济性的驾驶意图时,无级变速器的目标速比应满足电动机对传动比的要求。
2)在确定了目标传动比之后,需选择合适的速比控制算法使无级变速器的变化能够跟随目标传动比而改变,而且要相应迅速,稳定性好。
为了很好地解决这两个问题,就需要确定无级变速器的速比控制策略,它是无级变速器控制的核心,对整车的动力性和经济性有很大的影响。
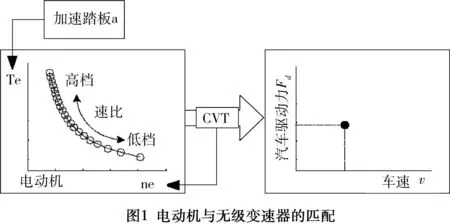
与传统内燃机动力汽车搭载有级变速传动系统的区别是,无级变速传动系统和电动汽车匹配是面工况。当汽车车速和负荷一定时,对于装有无级变速的车辆,由于速比可以连续变化,结合模型实现各自独立的目标控制。无级变速器的速比控制策略就是选择合适的速比,使电机的输出转速维持在给定的目标点,如图1所示。
速比控制比较容易达到的控制策略在假设驱动电机的任意转速和转矩都可以在瞬时达到的前提下,使驱动电机的工作点根据驾驶意图保持在最佳经济性曲线或最佳动力性曲线上。如果使用这种速比控制策略,当驾驶员改变加速踏板的开度时,增加扭矩提升动力时,驱动电机控制器首先控制电机输出转矩,使其尽可能工作在最佳动力曲线上,然后再改变无级变速器的速比使电机的转速带到其目标的工作点上[2]。

若按照这种速比控制方式,在加速或减速过程的任一时刻,都要使电机工作在最佳动力或经济曲线上。但是,驱动电机按这种方式运行时,由于在汽车急加速过程中电动机的后备功率不足,将会出现汽车的加速不良的现象。在这种情况下,就必须要求驱动电机的转速在短时间内迅速提高,使电动机的输出功率与加速踏板要求的目标功率相适应。而当驱动电机转速迅速增大时,其大部分转矩用来提高驱动电机和无级变速器输入轴的转速,从而导致汽车的速度减小,造成冲击。
需要选择一种对经济性和动力性折衷的速比控制方法,充分利用电动机的转矩余量,提高车辆瞬时的动力性能,在改善汽车驱动能力的同时,还可以减少电池的能量消耗,这样既保证了电动汽车的动力性又兼顾了其行驶的经济性,延长电动汽车的续驶里程。
这种对经济性和动力性折衷的速比控制策略以驱动电机的最佳工作曲线作为稳态时电机的工作点,而瞬时工况却与驱动电机沿着最佳经济性或最佳动力性工作轨迹不同。为了充分利用驱动电机的储备的后备转矩,这种速比控制方式是控制驱动电机的转速沿着加速踏板开度确定的目标功率的等功率曲线工作。如图2所示,通过控制电机的转矩和无级变速器的速比来调节驱动电机的转速,如果电动机原来在工作点P1,加速踏板的位置改变后,控制器应该使其沿着目标功率的等功率曲线移动,直到与最佳功率线相交的目标工作点P2。显然,这有时会受到电机最大转矩曲线的限制。在这种情况下,控制电机的工作点沿着最大扭矩曲线移动,直到达到目标功率曲线[3]。
2EMCVT与整车模型的建立与仿真
MATLAB/Simulink是一个用以进行动态建模、仿真和分析的软件包。系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统的行为,从而达到系统分析的目的。在Matlab中建立一个整车模型对使用者来说是十分困难,且精度难以得到保证。Cruise是由奥地利著名的AVL公司开发,用于研究汽车动力性、经济性、排放性能及制动性能的高级模拟分析软件,其灵活的模块化理念使其可以对任意结构形式的汽车传动系统进行建模和仿真[4]。本文采用这两种软件的优势,利用Cruise搭建了整车模型,在MATLAB/Simulink中设计了EMCVT的PID速比控制策略,并通过与Matlab(API)的接口,便捷地对速比控制策略和整车性能进行研究分析。
2.1EMCVT PID控制器模型的建立
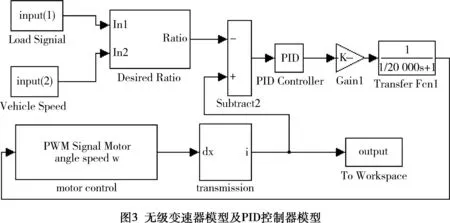
应用MATLAB软件建立电控式无级变速器速比控制器模型如图3所示,模型中的两个输入分别连接到Cruise软件用户桌面的信号输入端,与其对应的输出端分别为驾驶舱的加速踏板信号和车速信号。输出端对应的是传动比信号输出给无级变速器效率模块的信号输入端。Matlab/Simulink的输入速比PID控制器为目标速比和实际速比之差,经过负反馈的PID控制器控制无级变速器的速比,模型输出为无级变速器的实际速比。
2.2整车模型
在分析EMCVT速比控制原理的基础上,在MATLAB环境中设计了速比PID控制器,在Cruise中搭建了整车模型,将Simulink中模型以API形式导入并进行联合仿真。在选定各子系统模块后,根据汽车整车的配置方案和各部件之间的连接关系,用connect建立模块之间的机械连接和电气连接,如图4所示。

3仿真结果分析
为了能够比较EMCVT的控制策略的优劣,这里将固定速比减速器(FGR)和搭载EMCVT的电动汽车的动力性和经济性进行了比较。对纯电动汽车建立的经济性能任务Cycle Run和动力性能任务Full Load Acceleration和Climbing Performance三个计算任务进行仿真。
3.1循环工况仿真结果分析
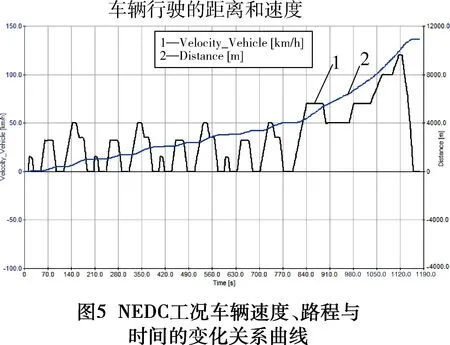
目前国内研制开发的纯电动汽车主要是用于城区和市郊的居民上下班使用。为此,本文选择了欧洲测试工况NEDC(由4个市区循环和1个市郊循环程序组成)作为循环行驶工况。
NEDC道路工况的速度、路程与时间的变化关系如图5所示。图6是该循环工况下搭载EMCVT和搭载FGR的电动汽车电池的SOC曲线与时间的关系。
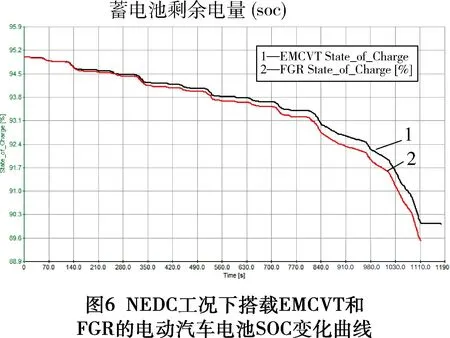
由图6可以看出,在NEDC循环工况下,搭载EMCVT的电动汽车比搭载FGR的电动汽车的电池SOC节约能量为0.7%。
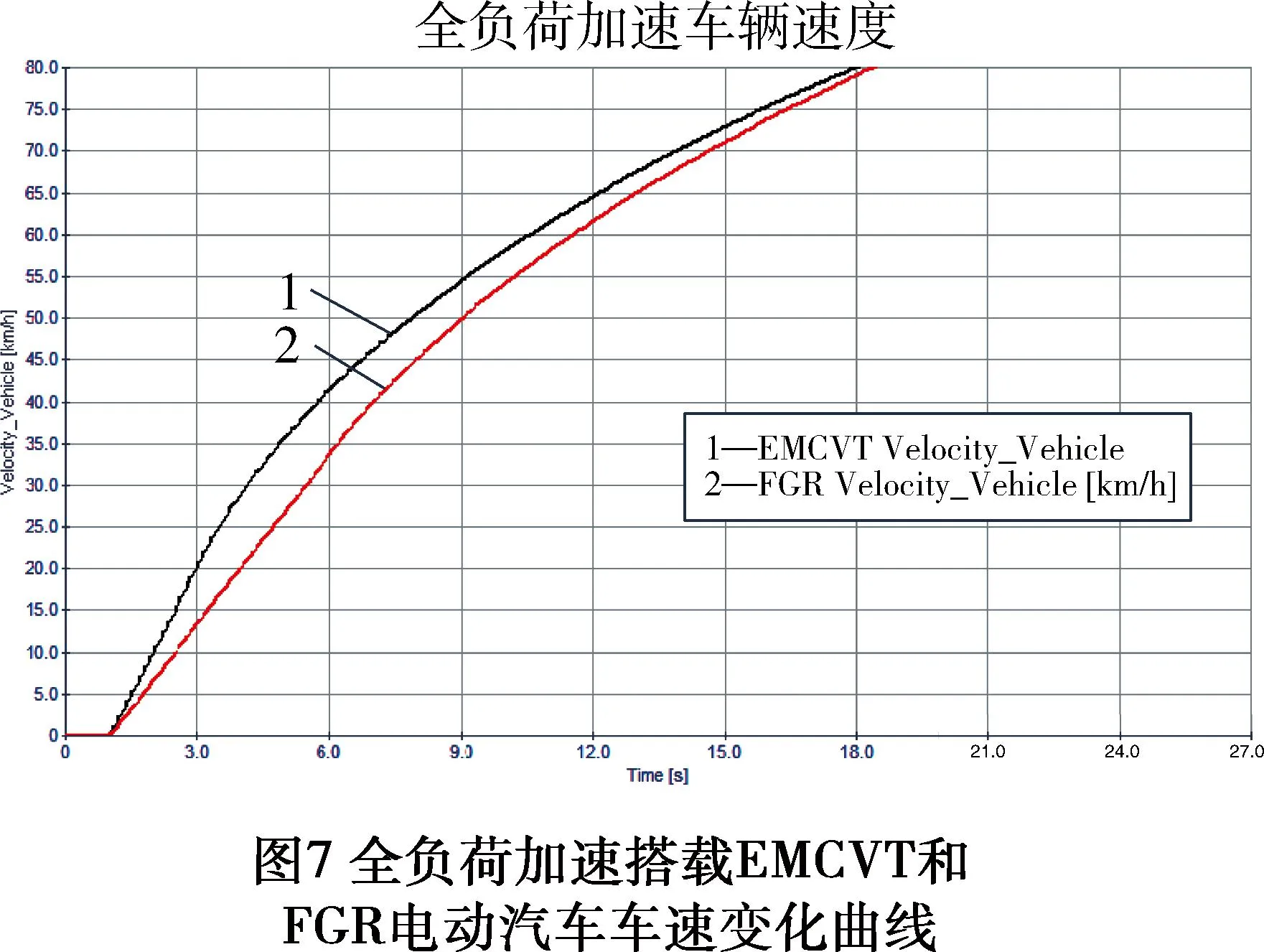
3.2全负荷加速性能仿真结果分析
在AVL CRUISE的Full Load Acceleration仿真任务中,忽略了坡道阻力,同时该计算任务必须在车辆满载的条件下运算。
图7表示车速变化曲线,搭载EMCVT的纯电动汽车的加速性能为:0~50 km/h的加速时间7.9 s,50~80 km/h的加速时间9.36 s,搭载固定速比减速器的电动汽车加速性能为:0~50 km/h的加速时间9.0 s,50~80 km/h的加速时间10.0 s。EMCVT的传动比连续变化,因此可以在PID控制器的控制下,随着车速和加速踏板开度的改变获得最佳的传动比,各区段加速时间都要优于FGR。

3.3最大爬坡度性能仿真结果分析
在AVL CRUISE的Climbing Performance仿真任务中,设定车辆的载荷状态为空载+100 kg的附加质量,得到的最大爬坡度仿真结果如图8所示。
从图8中可以看出,空载+100 kg的附加质量搭载EMCVT的纯电动汽车在车速为20 km/h时,其最大爬坡度为27.9%,搭载FGR的纯电动汽车在车速为20 km/h时,其最大爬坡度为24.4%,搭载EMCVT的电动汽车比搭载FGR的电动汽车的爬坡能力在车速超过34 km/h时两者相差不多,而在车速小于 27 km/h 时提高了3.5%。
4结论
本文对EMCVT的速比控制目标和要求进行分析,采用一种经济性和动力性折衷的速比控制策略。在MATLAB中建立PID的速比控制模型,在Cruise中建立整车模型,然后将Simulink中模型以API形式导入Cruise中进行联合仿真。仿真得出搭载EMCVT的电动汽车比搭载固定速比减速器的电动汽车节约电池能量0.7%,全负荷时的加速性能0~50 km/h 的加速时间减少1.1s,50~80 km/h的加速时间减少0.64 s,车速小于27 km/h的时最大爬坡性能提高了3.5%。本文的数据得出搭载EMCVT应用本文的控制策略比搭载FGR的电动汽车续驶里程更长,加速时间更短,爬坡能力更强。本文的控制策略为电控无级变速器在电动汽车设计匹配上奠定了理论基础。
参考文献:
[1]周云山,钟勇.汽车电子控制技术[M].北京:机械工业出版社,2004.
[2]安晓鹃,董秀国,彭彦宏.无级变速器传动系综合控制策略[J].吉林大学学报,2005,23(6):3-4.
[3]翟丽.电动轿车机电传动系统的匹配与仿真[J],北京理工大学学报,2007,27(10):3-4.
[4]杨超. 基于Cruise纯电动轿车动力学仿真研究[J],上海汽车,2006,20(10):2-3.
Modeling and Simulation of Match Control Strategy of Pure Electric Vehicle with Continuously Variable Transmission
YANG Bao-cheng, ZHAO Hai-xin, ZHANG Zhen-zhong
(Department of Automotive Engineering, Chengde Petroleum College, Chengde 067000, Hebei, China)
Abstract:In order to better conserve battery energy of electric vehicle, increase its driving distance and meet with the requirements in different driving conditions of electric vehicle, the paper analyzes the speed ratio control objectives and requirements of the continuously variable transmission. The driver’s accelerator pedal will be interpreted as the instantaneous power requirements. Taking advantage of their respective strengths of both MATLAB/Simulink and Cruise software, in the MATLAB/Simulink environment we designed a compromise speed ratio control strategy between power and economic PID controller of speed ratio, taking into account their respective advantage of MATLAB and Cruise software, in Cruise environment built a vehicle model, put the Simulink model through API interface into Cruise to complete co-simulation. The result of simulation is the vehicle with continuously variable transmission has better performance in terms of better acceleration, climbing ability stronger, more battery power saving, longer driving distance than the vehicle with fixed gear reducer.
Key words:electric vehicle; continuously variable transmission; match control; Matlab & Cruise; modeling & simulation
收稿日期:2016-01-20
作者简介:杨宝成(1961-),男,河北丰宁人,承德石油高等专科学校汽车工程系工程师,主要从事汽车检测与维修方面的教学研究。
中图分类号:U469.72
文献标识码:A
文章编号:1008-9446(2016)03-0028-05
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
内燃机与配件(2020年3期)2020-09-10
汽车实用技术(2018年15期)2018-08-29
上海师范大学学报·自然科学版(2018年3期)2018-05-14
潍坊学院学报(2017年2期)2017-04-20
科技创新与应用(2016年36期)2017-02-21
广西科技大学学报(2016年1期)2016-06-22
汽车工程(2016年11期)2016-04-11
化工自动化及仪表(2015年12期)2015-01-15
湖南大学学报·自然科学版(2014年2期)2014-12-25
