
基于视觉的微细对接焊缝检测方法
2016-07-22 10:50崔红星王晓军山东科技大学电子通信与物理学院山东青岛266590
电子测试 2016年11期
崔红星,王晓军(山东科技大学电子通信与物理学院,山东青岛,266590)
基于视觉的微细对接焊缝检测方法
崔红星,王晓军
(山东科技大学电子通信与物理学院,山东青岛,266590)
摘要:本文将机器视觉和图像处理技术融入到紧密对接焊缝的检测系统中,提出一种采用LED光源照明的焊缝检测方法。第一步采用Canny算法对焊缝进行边缘处理,第二步采用概率Hough变换提取焊缝中心线。实验结果表明,该方法鲁棒性强,可以精确检测出焊缝中心线,达到了期望的检测精度,解决了微细对接焊缝检测问题,结果令人满意。
关键词:焊缝中心线;LED光源;Canny算法;概率Hough变换
1 自主设计视觉传感系统
主动光视觉系统一般是由特定结构光源与摄像机组成,其利用具有某种结构光源将光线投射到工件表面,由摄像机获取工件表面的图像并进行处理。微细对接焊缝视觉跟踪系统主要由三部分组成:视觉传感系统、机器人系统、主控计算机,如图1 所示。视觉传感系统是本文自主设计的,由数字摄像机和结构光光源组成,本实验选用的是加拿大的Point Grey摄相机,峰值波长为660nm带宽为20nm的LED光源,中心波长为660nm带宽为10nm的一字型激光发生器。数字摄像机安装于焊枪前方50mm处,为了使焊缝图像较好地反映焊枪偏离焊缝的情况,数字摄像机的光轴中心垂直于薄钢板平面。LED光源位于摄像机的两侧,倾斜一定角度打向工件,确保摄像机获取清晰图像。激光发生器由定位支架固定于数字摄像机的前方,并倾斜一定的角度,确保其打出的激光带在摄像机的摄像视野范围内。

图1 微细焊缝视觉跟踪系统
2 改进Canny算法提取焊缝边缘
Canny 算子是基于最优算法的边缘检测算子,该算法具有检测位置精度高、边缘检测为单像素等优点,在工程实践中得到广泛应用。传统Canny算子进行边缘提取时会提取出由弧光及工件污渍引起的边缘,这些干扰边缘对后续图像处理非常不利,增加后续数据处理计算量。针对摄像机采集的焊缝图像研究分析后发现具有以下特点:焊缝中心线处像素点灰度值远小于其左右方向上像素点处灰度值;焊缝中心线处像素点灰度值与其上下方向上像素点灰度值变化不大。本文根据以上焊缝特点采用灰度值做差方法剔除干扰边缘,其原理是在进行边缘连接后,在原始图像中计算边缘点像素四邻域内灰度平均值,并用该灰度值分别与位于其上下十行位置像素灰度值做差得到d1、d2,同时分别与位于其左右三十列位置像素灰度值做差得到d3、d4。若d1和d2同时小于阈值T1,且d3或d4大于阈值T2,则该像素所对应边缘点保留,否则该像素所对应边缘点去除,灰度值做差公式如下式所示:

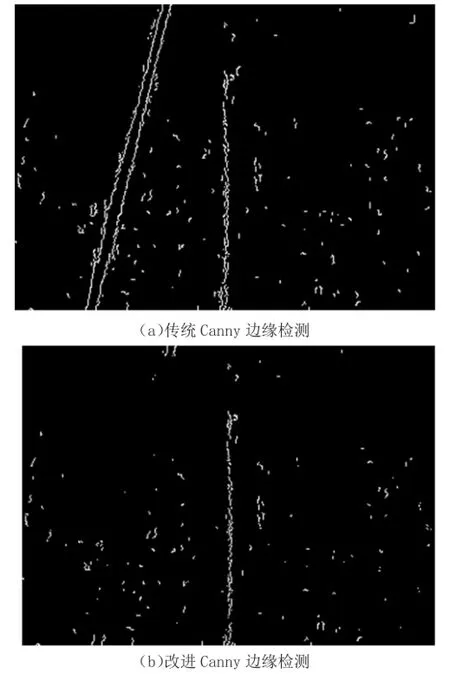
图2 Canny算子边缘检测
图2(a)中可以看出传统Canny算子进行边缘检测时,未能够有效剔除干扰信息,检测出弧光等干扰边缘。图2(b)中可以看出改进Canny算法能够去除干扰边缘,且对不同焊接图像都有比较好的边缘提取效果。由于焊接环境复杂,焊缝特征不明显,改进Canny算法虽会遗漏部分边缘信息,也没有去除全部干扰信息,但并未对后续焊缝中心线提取产生不利影响,反而会缩短图像处理时间,因此改进Canny算法有效,能够满足系统的工作要求。
3 改进Hough变换提取焊缝中心线
检测到焊缝边缘后,需要用一条直线拟合焊缝中心,即提取出焊缝中心线。Hough变换对数据不完全或噪声不是非常敏感,具有良好鲁棒性及抗干扰性,已成为模式识别中提取直线的重要工具。结合焊缝图像边缘检测实际特征及整个系统实时性要求,本文使用概率Hough变换提取焊缝中心线。由于概率Hough变换在进行直线提取时会检测出多条直线,或检测出伪直线,然而焊缝检测时只需要检测出一条准确焊缝中心线,故结合焊缝图像特点对概率Hough变换进行改进,使其检测出一条能够代表焊缝真实位置直线。由于焊缝中心线是竖直方向,并且焊缝中心线上像素点灰度值与其周围像素点灰度值差异较大,根据这些特征我们在概率Hough变换中对检测直线斜率和检测直线端点灰度值进行约束,从而去掉干扰直线,仅保留一条焊缝中心线,具体算法实现概括如下:
(1)采用概率Hough变换算法检测直线,随机抽取检测直线端点,如果该直线端点已被抽取,则继续在剩下直线中随机抽取,抽取直线端点后进入步骤(2);若直线都抽取完则进行步骤(4)。
(2)计算直线端点斜率,若斜率小于阈值,则标记为正确直线并进行步骤(3),否则回到步骤(1)。
(3)选取该直线的起始端点k及分别位于其前、后10列的像素点k1、k2,把k像素点灰度值分别与k1、k2像素点灰度值做差并取其绝对值,计算差值的和,存入数组并进入步骤(4)。
(4)若不是最后一组直线端点,则进入步骤(1),否则寻找数组中的最大值,找出最大值所对应的直线端点,输出该端点所在直线,算法结束。

图3改进累计概率Hough变换检测效果图
图3看出改进算法能有效去除干扰直线,准确保留一条最优直线;并且保留直线紧紧位于焊缝中心线处,直线准确度较高,能够代表焊缝的真实位置信息;因此改进算法效果较好,能够满足焊缝中心线检测要求。
4 结束语
本文利用自主设计的视觉传感系统,成功地实现了微细对接焊缝中心线提取工作,该方法简单快速并且检测精度和准确度较高。首先同时采用LED光源和激光器搭建视觉传感系统,并利用该系统进行焊接实验并获取焊接图像,利用改进的Canny算法实现焊缝中心线边缘检测,然后采用改进概率Hough变换提取焊缝中心线,进而提取出焊缝信息。实验结果表明,文中提出的方法能够高精度的进行焊缝中心线提取,取得了令人满意的效果。
参考文献
[1]岳彦刚.Shearlet变换在图像边缘检测中的应用研究[D].西安:西安建筑科技大学,2013.
[2]黄惠迪,官洪运,邓昶,薛节.基于Android平台的车道线检测系统设计[J].电子设计工程,2015,15:99-102.
[3]余佶.多焦面纺织纤维图像融合的研究[D].上海:东华大学,2011.
[4]金刚.自适应Canny算法研究及其在图像边缘检测中的应用[D].杭州:浙江大学,2009.
Micro Butt Welding Seam Detection Method Based on Vision
Cui Hongxing,Wang Xiaojun
(College of Electronic Communication and Physics,Shandong University of Science and Technology,Qingdao Shandong,266590)
Abstract:In this paper,the machine vision and image processing technology are integrated into the close butt weld inspection system,and a method of welding seam detection using LED light source is proposed. In the first step,the Canny algorithm is used to deal with the edge of the weld.Second step,using probabilistic Hough transform to extract the centerline of the weld.The experimental results show that the method is robust and can accurately detect the center line of the weld seam,which can achieve the desired detection accuracy,and the results are satisfactory.
Keywords:the center line of the weld;the LED light source;Canny algorithm;probabilistic Hough transform
中图分类号:TP242.62.
文献标志码:A
