
基于置信规则库的控制器及控制系统仿真
2016-08-02 08:40徐晓滨李世宝王双中
杭州电子科技大学学报(自然科学版) 2016年3期
徐晓滨, 李世宝, 马 雪, 王双中
(杭州电子科技大学自动化学院,浙江 杭州 310018)
基于置信规则库的控制器及控制系统仿真
徐晓滨, 李世宝, 马雪, 王双中
(杭州电子科技大学自动化学院,浙江 杭州 310018)
摘要:针对被控对象系统参数不确定性变化的情况,设计一种基于置信规则库(BRB)的控制器.首先建立置信规则库描述控制器输入量与输出量之间的复杂非线性关系,然后给出非线性学习模型,解决专家给定初始BRB参数的优化问题.用训练后BRB的输出控制被控对象动作.利用Simulink设计出BRB 控制模块,并通过在变参数他励直流电动机转速控制中的仿真实验,说明了所提方法的有效性.
关键词:置信规则库推理;控制系统仿真;PID控制器;证据推理规则;他励直流电动机
0引言
随着工业系统结构与功能的日益复杂,运行过程中受到的各种干扰使得被控对象的系统参数随时间产生变化,通常这种变化是不确定的,这样就难以用准确的数学模型对其进行建模[1-2],故传统的线性PID控制器不再适用.置信规则库(BRB)推理能够有效地对信息的不确定性和数据的非线性进行合理地描述与建模.相对于传统的推理方法其特点是能够在系统结构或输入数据含有不确定性和非精确性的情况下进行建模与推理[3-4].本文针对被控对象系统参数不确定性变化的情况,设计了一种基于BRB推理的PID控制器.建立的置信规则库能够描述偏差量、偏差量积分和偏差量微分(输入量)与控制量(输出量)之间存在的复杂非线性关系.同时为了解决专家给定的初始BRB参数不精确问题,通过建立的优化学习模型训练得到最优的参数取值.训练后BRB输出的控制量估计值作为被控对象的输入,产生控制作用.置信规则库推理控制作为经典模糊控制的一种扩展,不仅能够应用于实际工程中机电设备的控制,还可以通过仿真实验使初学者更系统地掌握控制器的设计方法.
1基于置信规则库推理的PID控制器设计
传统的PID闭环控制是一种线性控制,它根据给定值输入控制信号r(t)与实际输出值y(t)构成偏差信号e(t)=r(t)-y(t).令e, eI和eD分别表示偏差量、偏差量积分和偏差量微分,其线性控制规律u(t)=KPe(t)+KieI+KdeD,这里定义Ki=Kp/Ti,Kd=KpTd,得到输出u,其作用于被控对象,使输出y稳态和动态性能达到一定指标,如上升时间tr、调节时间ts和最大超调量σp[5].本文利用置信规则库描述输入量e,eI,eD和输出量u之间的非线性关系.置信规则是传统IF-THEN规则的一种扩展,其中关键的不同在于前者的输出部分加入了证据形式的置信结构.该系统可以很好地实现不确定性定量信息和定性知识下的复杂决策问题建模[6].基于置信规则库推理的PID控制器设计中,各参数意义如表1所示.

表1 BRB-PID控制器模型及其参数的物理意义
表1中,第k条规则表示为:
IF(e0,1isEk,1)∧(e0,2isEk,2)∧(e0,3isEk,3) THEN {(D1,βk,1),(D2,βk,2),…,(DN,βk,N)},
并有参数θk和δi,(k=1,2,…,L,i=1,2,3).
(1)
式中:∧为逻辑连接符,表示“与”的关系.
1.1输入和输出量参考值的确定
初始的置信规则构建时,首先需要确定输入向量E0中每个分量的变化范围,若用lbi和ubi代表e0,i的上下界,则E0的取值集合为:SE={E0=(e0,1,e0,2,e0,3)|lbi≤e0,i≤ubi,i=1,2,3}.

1.2基于ER算法的BRB推理

(2)
获得第k条规则的激活权重后,利用ER算法将所有规则后项的信度分布进行融合,得到输出:

(3)

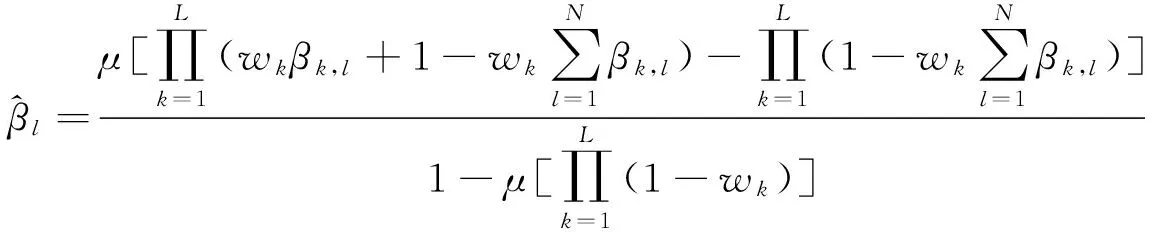
(4)

(5)
由式(3)估计输出值为:
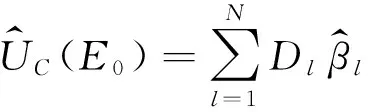
(6)
1.3BRB的优化模型


(7)
式中:Q为选择的训练样本个数.通过Matlab中的非线性优化函数fmincon实现优化.
2基于Simulink的控制系统仿真及实验设置
2.1基于BRB-PI控制器的他励直流电动机闭环控制系统模型
利用Simulink搭建出BRB-PI闭环控制系统模型相较于传统的PID闭环控制系统,主要区别在于将PID参数调节Kp,Ki和Kd换为BRB非线性参数调节.当被控对象输入为电枢电压u,输出为电动机的转速y,在不加负载的情况下,被控对象的传递函数为[8]:

(8)

由于他励直流电动机电枢电阻和电感存在容差,并且长时间运行会引起电机自身温度变化,以及电机负载变化引起的转动惯量的变化,这些因素都会导致电机中的参数Ta和Ce会随时间发生不确定性变化[9].这些变化随之引起被控对象的传递函数发生改变.表2中给出Ta和Ce在一定范围内变化时,相应传递函数的变化情况.
利用Simulink搭建PI闭环控制系统,将表2中的5组传递函数按顺序依次作为被控对象G(s),输入为幅值10 V的阶跃信号,控制系统采样周期取T=0.01 s,反馈环节KF=0.01.当利用传统PI控制器对G(s)实施闭环控制时,可以通过调节参数Kp和Ki,使控制系统的稳态和动态性能达到如下的指标范围:tr∈[0,0.1],ts∈[0,0.3]和σp∈[0%,7%].对于每个G(s)调整出一组Kp和Ki的取值,使此时的控制系统满足性能指标的要求,然后在输入为阶跃信号时,从系统响应开始到结束的时段(0.5 s)采集30个采样点,每组采样点是一个三维向量,记为E0=(e,eI,u),那么表2中有5个不同的G(s),则总共可以得到150个采样数据点.

表2 参数不确定变化的他激直流电动机传递函数
2.2BRB-PI他励直流电动机控制器设计
根据第1节BRB控制器模型,给出BRB-PI他励直流电动机控制器设计如下:
1)确定BRB模型输入与输出量的参考值
通过对2.1节所获样本的分析可以确定输入E0中每个分量的变化范围,并将样本表示为集合:
SE={E0=(e0,1,e0,2)=(e,eI)|-0.6≤e≤10.057 8,0.1≤eI≤0.66}.
(9)
根据专家经验,设置输入变量e,eI和输出变量u的参考值(语义值).e参考值(语义值)为A11=-0.6(NL);A12=-0.3(NS);A13=0(Z);A14=0.2(PS1);A15=1(PS2);A16=4(PM1);A17=7(PM2);A18=10.1(PL);eI参考值(语义值)为A21=0.1(PS1);A22=0.3(PS2);A23=0.5(PS3);A24=0.56(PM1);A25=0.58(PM2);A26=0.6(PM3);A27=0.61(PL1);A28=0.62(PL2);A29=0.64(PL3);A210=0.66(PL4);u的参考值(语义值)为D1=115(PS1);D2=146(PS2);D3=175(PM1);D4=207(PM2);D5=238(PL1).语义值P,N,L,M和S分别代表“正”、“负”、“大”、“中”和“小”,进而可知BRB中的置信规则为:
Rk:IFeisEk,1ANDeIisEk,2,THENOutis {(D1,βk,l),…,(DN,βk,N)}.

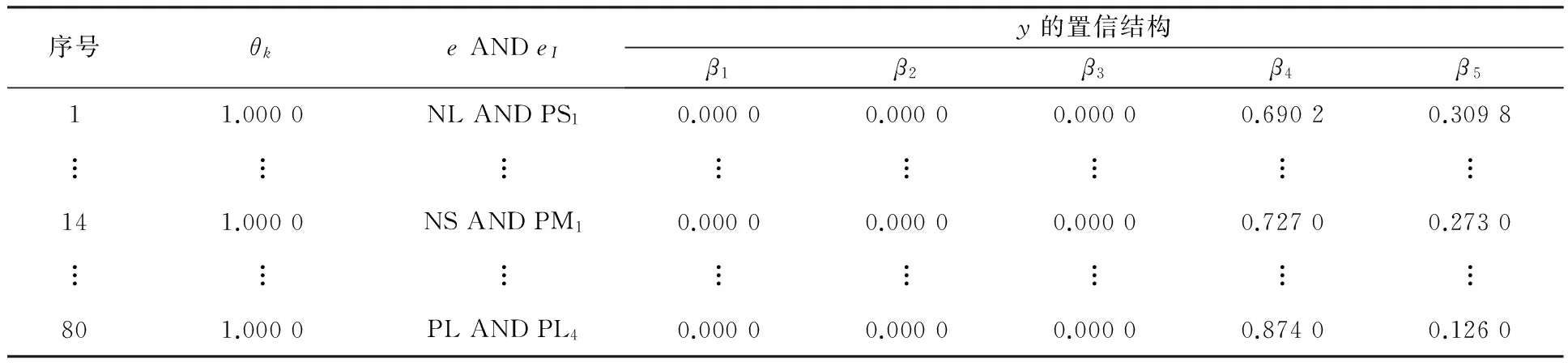
表3 初始BRB规则库部分参数取值
将2.1节得到的150个样本中的e,eI作为初始BRB系统的输入,经ER推理,最终由式(6)求出它们对应的控制量估计值输出,得到控制量真实值与估计值代入式(7)得V(ξ)=32.579 2.可见由专家给出的初始BRB系统对于u的估计效果并不理想,根据1.3节给出的BRB优化模型,优化后的估计结果如图1所示,V(ξ)=2.451 5,δ1=1,δ2=0.537 2.优化后的部分规则库参数值如表4所示.

图1 优化后BRB模型控制量的估计值
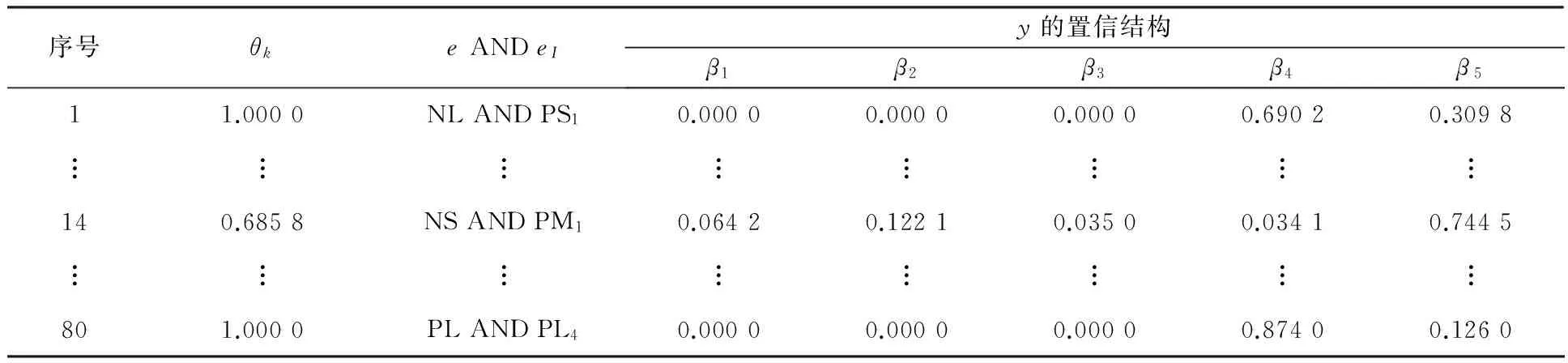
序号θkeANDeIy的置信结构β1β2β3β4β511.0000NLANDPS10.00000.00000.00000.69020.3098︙︙︙︙︙︙︙︙140.6858NSANDPM10.06420.12210.03500.03410.7445︙︙︙︙︙︙︙︙801.0000PLANDPL40.00000.00000.00000.87400.1260
2)利用S-FunctionBuilder方法设计BRB控制器模块
S-FunctionBuilder是一个根据使用者要求和C代码来构建一个S-Function的块,本文将介绍如何使用S-FunctionBuilder来生成BRB控制器模块[10].具体步骤如下:(1)在Matlab中打开Simulink,创建一个BRB-PI.mdl文件,将User-Defined-Functions目录下的S-Functionbuilder模块拖拽新建的BRB-PI.mdl文件中.(2)双击S-Functionbuilder,进入编辑创建BRB-PI名字;单击框图目录下的DataProperties进入如图2所示框图,单击Inputports设置BRB-PI二维输入变量分别是BRB_K,BRB_I.单击Outputports设置BRB-PI一维输出u.(3)在Matlab的command窗口中键入mex-setup,单击图2右上角Build对Outputs中的C代码(即优化后BRB-PI算法的代码)进行编译,最终生成BRB-PI模块.
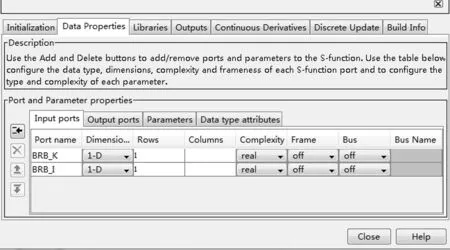
图2 输入与输出创建
3)BRB模块仿真结果展示
按上述步骤搭建好BRB-PI模块后,在Simulink环境下,当Ta和Ce偏离额定值±5%内随机变化时(100次随机实验),BRB闭环控制系统给出的输出电机转速y的3个性能指标平均值都满足m(tr)=0.09∈[0,0.1],m(ts)=0.21∈[0,0.3],m(σp)=6.49%∈[0%,7%],其中m表示均值.可见,优化后的BRB控制器对于被控对象参数的不确定变化具有鲁棒性,满足了设计的需求.
上面详细介绍如何设计与搭建一个基于BRB的闭环控制系统的过程,主要涉及到的实验项目包括:1) 实际被控对象的z变换和参数设置;2)被控对象变参数情况下的PID控制器闭环控制仿真与控制器参数整定;3)基于已有历史控制信息及经验,搭建初始的BRB-PI控制器及闭环控制系统;4)基于Matlab的BRB非线性控制器参数优化;5)具有理想控制性能的BRB-PI控制器系统仿真测试.这些实验项目不仅适用于一般实际工程中机电设备控制系统的设计,同时也可运用于到教学实践中.将先进的控制算法应用于复杂的控制对象中,通过对比分析深入理解各种方法的优劣,激发学习者的兴趣;通过对基于Simulink的模块化控制系统的仿真设计演练,加强学习者对整个闭环控制系统各个环节及前后控制信号传导关系的理解;通过控制算法的编写与高级编程语言的应用和编译,提高了学习者在实际工程应用中的编程能力.
3结束语
本文研究的基于置信规则库推理的PID控制器,能够利用置信规则库推理和专家知识,并通过少量样本优化训练,建立精确的PID三维偏差量输入与输出控制量之间的非线性关系,以便于到达对于不确定性系统的控制,使此系统具有一定自适应性和鲁棒性.它克服了传统PID控制器对于参数不确定系统控制的困难,给出了一种更为实用的鲁棒控制方法.在今后的研究中,可以进一步将该控制策略应用于更为复杂的被控对象,验证其在实际中的应用效果.
参考文献
[1]刘益民.基于改进BP神经网络的PID控制方法的研究[D].西安:中国科学院西安光学精密机械研究所,2007.
[2]李彬.置信规则推理方法及其在库存与生产运作管理中的应用[D].武汉:华中科技大学,2012.
[3]XUXB,LIUZ,CHENYW,etal.CircuitToleranceDesignUsingBeliefRuleBase[J].MathematicalProblemsinEngineering,2014,501:908027.
[4]徐晓滨,汪艳辉,文成林,等.基于置信规则库推理的轨道高低不平顺检测方法[J].铁道学报,2014,36(12):70-78.
[5]刘士荣,陈雪亭,黄国辉,等.计算机控制系统:1版[M].北京:机械工业出版社,2007:144-168.
[6]XUDL,LIUJ,YANGJB,etal.Inferenceandlearningmethodologyofbelief-rule-basedexpertsystemforpipelineleakdetection[J].ExpertSystemswithApplications,2007,32(1):103-113.
[7]CHENYW,YANGJB,XUDL.Ontheinferenceandapproximationpropertiesofbeliefrulebasedsystems[J].InformationSciences,2013,234:121-135.
[8]高国燊,于文烋.自动控制原理:1版[M].广州:华南理工大学出版社,1999:19-55.
[9]王崇武,何龙飞,李宏.电动力鱼雷推进无刷直流电机参数在线辨识研究[J].西北工业大学学报,2013,31(3):373-377.
[10]胡琳静,孙政顺.SIMULINK中自定义模块的创建与封装[J].系统仿真学报,2004,16(3):488-491.
DOI:10.13954/j.cnki.hdu.2016.03.016
收稿日期:2015-12-16
基金项目:国家自然科学基金资助项目(61374123, 61573275,61573076)
作者简介:徐晓滨(1980-),男,副教授,智能控制,专家系统.
中图分类号:TP273+.3
文献标识码:A
文章编号:1001-9146(2016)03-0078-06
Belief Rule Base-based Controller and Control System Simulation
XU Xiaobin, LI Shibao, MA Xue, WANG Shuangzhong
(SchoolofAutomation,HangzhouDianziUniversity,HangzhouZhejiang310018,China)
Abstract:This paper presents a BRB-based controller to deal with the controlled object system with uncertain parameters. The belief rule base(BRB) can be used to model the complex nonlinear relationship between inputs and output. A nonlinear learning model is constructed to optimize the initial parameters of BRB. The outputs generated by the optimized BRB controller can be used as a controlled object input and generates control action. In Simulink environment, the BRB control module is designed, and the control experiments on the excited DC motor with uncertain parameters are presented to illustrate the effectiveness of the proposed method. It further presents the details of the closed-loop control system simulation model based on the BRB-based controller, which can be applied not only to the design of industrial control systems, but also to the automation-related experimental teaching for undergraduate or graduate students so that they can master this kind of the advanced controller design approach considering expertise’s experiences.
Key words:belief rule base reasoning; control system simulation; PID controller; evidential reasoning rules; excited DC motor
