
TS30在水库枢纽工程监测基准网中的实践
2016-08-12 03:00李军安陕西省水利电力勘测设计研究院测绘分院陕西西安710002
陕西水利 2016年2期
李军安(陕西省水利电力勘测设计研究院测绘分院 陕西 西安 710002)
TS30在水库枢纽工程监测基准网中的实践
李军安
(陕西省水利电力勘测设计研究院测绘分院陕西西安710002)
本文以水库工程监测基准网设计与建立作为实例,就如何保证监测基准网达到预期精度进行讨论,从选取点位优化网形、精度估算确定经济合理的等级、影响测量机器人观测精度的因素等几个重要技术环节进行了比较详细地分析论述,得出相应的结论,可供类似项目参考。
LeicaTS30全站仪;水库工程 ;监测基准网;实践
1 前言
LeicaTCA系列全站仪号称测量机器人,它具有自动目标识别的ATR(automatic targetrecognition)功能,能自动搜索、照准目标,实现角度、距离的全自动化测量。为此,可按照所需的观测等级限差要求,将多测回测角软件置于全站仪,测站安置整平仪器后设置各等级方向观测限差,经瞄准测站所有的观测方向棱镜后,启动正式观测键,仪器就能实现多个测回的自动观测和记录,现场进行限差检验,测站观测结束会自动蜂鸣停止,观测过程无需人工干预,避免手动限差计算,消除人为观测因素对观测质量的影响,可以提高观测质量和效率。本文就LeicaTS30全站仪在南沟门水库枢纽区安全监测项目中建立水平位移监测基准网的观测实践效果叙述如下。
2 监测基准网优化设计
2.1点位选设及网形
本工程监测的对象为坝体、近坝区高边坡及电站厂房背坡,监测对象相距较近,故水平位移监测基准网整体布设。根据施工区域地形、监测部位分布情况以及精度要求,水平位移监测基准网采用边角网。首先在1:2000地形图上布设网点,然后经实地选点确定基准点布设 7个 (J01~J07),工作基点 5个(J08~J12),上述12点构成边角全测网,网点布置见图1所示,网中:测距边28条,最大边长(J02~J04)1358.299m,最小边长(J08~J09)309.371m,平均边长804.072m。网中测距边的最大垂直角为(J08~J09)5°26′54.5"。
基准点位选设:大坝上游选设J01、J02、J03、J11等三点,下游(包括电站厂房区)J04、J05、J06、J07等4个点;工作基点选设:大坝下游选设J08、J09、J10、J12等4个点。其中:J03、J11两点主要用于监测导流洞及引水发电洞进口边坡水平位移;J01、J10、J11三点主要用于监测大坝表面水平位移;J01、J12两点主要用于监测溢洪道边坡水平位移;J08、J09两点主要用于监测导流洞出口及电站厂房边坡水平位移。
2.2边角网精度估算
基准点及工作基点采用实地测取概略坐标,采用《工程测量控制网微机平差系统》软件(清华山维公司)在微机上进行精度估算。精度估算参数选取:测角中误差分别选取0.7″和0.5″,测距中误差ms取0.6mm+1ppm·Dkm,网形按基准点与工作基点构成的边角全测整体网进行精度估算,结果如下表1。
从上表中可以看出,在两种观测方案中:其测角中误差取0.5″的观测方案可以满足最弱点点位中误差为±2.0mm的精度要求,且边角全测整体网精度较好,故水平位移监测基准网采用测角中误差为0.5″的观测方案实施,可以保证整网设计精度要求。
3 外业观测方法及限差要求
测站水平角采用方向观测法观测15测回,相应天顶距、斜距测量也为15个测回。当观测方向数少于3个时,不归零。当观测方向多于6个时,应进行分组观测。分组观测应包括两个共同方向(其中一个为共同零方向),共同方向两组观测角之差不应大于同等级测角中误差的2倍(即1.0″)。分组观测的最后结果,应按等权分组观测进行测站平差。
气象元素应同时在测站和反射镜站的测前、测后分别测记,并加修正值改正,然后再取两端平均值进行气象改正。测定温度时,必须将温度计置于测伞之下,悬挂与仪器同高度。
在安装强制对中基座的观测墩顶安置仪器和棱镜后,利用加工的专用游标卡尺在3个方向分别量测仪器和棱镜高度,其量取较差应小于0.3mm,再取中数。
4 外业观测成果的计算和验算分析
4.1气象梯度变化对测角影响
尽管LeicaTCA系列全站仪实现了自动化观测,消除了人的因素对方向观测值的影响,但其自动目标识别的ATR定位精度受气象梯度变化影响十分大,如J01、J02、J03等点间观测视线均跨越坝上游水面,其气象梯度变化对测角影响十分显著,以测站J03不同日期多次观测记录信息及数据分析如下:
(1)根据测回起止时间分析判断重测次数
a)第一次独立观测6月9日从19:06:04开始,至19:29:25完成15个测回观测后,又再次于19:31:58至19:32:45重测第11测回;
b)第二次独立观测6月20日测站15个测回观测时段信息如下表2所示。
从上表2的记录时间分析可以看出:本测站除第4、7、8测回观测数据未重测外,其它各个测回观测数据均是重测值。说明该时间段气象条件变化十分大,测回差超限,仪器在自动检验重测。

表1 监测基准网精度估算表

表2 J03测站15个测回观测时段信息统计表

表3 J03测站从不同日期观测方向值统计表

表4 J02测站15个测回观测时段信息统计表
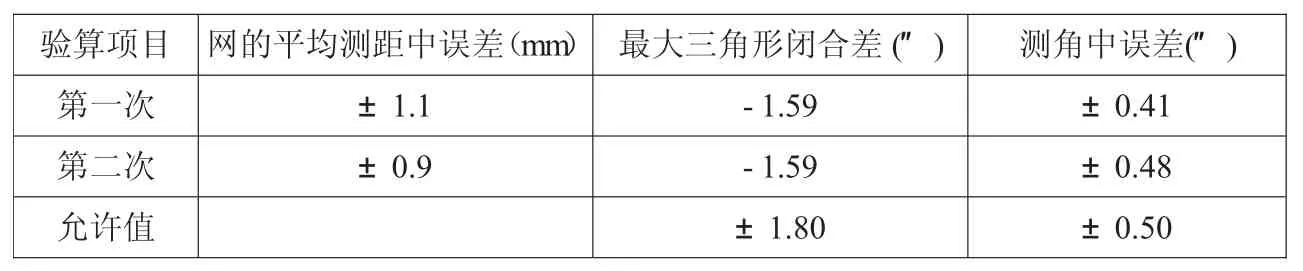
表5 测距、测角精度验算统计表

表6 数据处理平面和高程精度统计表
c)第二次独立观测6月26日返工,从18:35:36开始,至18:58:43完成15个测回观测后,又继续于18:59:32至19:01:19重测第2测回,19:01:09至19:01:55重测第6测回,观测用时26分20秒,才符合测站限差要求;
d)第二次独立观测7月3日返工,观测从18:59:01开始至19:22:05结束用时23 分04秒完成15个测回观测,未重测。
(2)J03测站从不同日期观测方向值统计分析重测精度,如下表3。
尽管测站仪器多次重测后达到测站设置限差,但从上表3可以看出:6月20日和6月26日两次设站的J03~J01方向值较差分别为-2.44"和-1.13",超出允许值。
(3)类似重测情况如J07站第二次观测是6月21日19:32:26开始第1测回观测,第6测回结束时间为19:41:18;按照每测回用时推算正常观测第15测回结束时间应为19:55:41;应注意的是记录显示第7测回开始时间为19:56:29,第15测回结束时间为20:10:33;说明第7至15测回全部为重测数据。
(4)类似情况又如J02站第二次观测时段信息统计如下表4。
从上表4可以看出,该测站6月23日18:10:07开始第1测回观测,第6测回结束时间为18:18:50;按照每测回用时推算正常观测第15测回结束时间应为18:33:23;进一步说明第7至15测回为重测值;应注意的是记录显示第7测回开始时间为18:39: 06,第14测回结束时间为18:51:51,说明第7至14测回在此时间段内全部为重测数据,且18:33:23至18:39:06期间仪器可能连续4次在重测第7测回。第15测回观测时间为 18:54:15~18:55:02,说明 18:51: 51~18:54:15时间段内仪器又在重测第15测回数据作废。
综上所述,通过测回起止时间信息和不同日期观测方向值统计分析认为,气象梯度变化对观测方向值的影响可以通过记录中测回时间段重测测回频次表现出来。
4.2测距、测角精度验算
外业观测完成之后,进行了测距中误差、三角形闭合差、测角中误差等项目的验算。验算结果如下表5所示。用于计算测角中误差的三角形18个,其三角形闭合差小于1/3限差10个,在1/3~1/2限差内7个,大于1/2限差1个。
4.3外业观测成果数据处理精度统计
经验算合格后,采用《工程测量控制网微机平差系统NASEW》软件进行内业数据处理。平面网数据处理按固定一点一方位的独立网,坐标起算点为J10,起算方位为J10~J01,边长投影至852m高程面;高程网数据处理按起始于J01基准点的独立网进行平差。数据处理的平面和高程精度如表6所示。
4.4首期外业两次独立观测较差分析
两次独立外业观测成果进行分别数据处理后,计算其坐标较差最大为△X=0. 9mm,△Y=4.1mm,△S=4.2mm,坐标较差小于限差值±5.6mm;高程较差最大△H=-6. 2mm,高程较差小于2高程中误差(即± 8.48mm);说明两次独立观测成果均符合要求,即可取均值作为基准值。
5 结语
本文通过LeicaTS30全站仪在南沟门水库枢纽区安全监测项目中,建立水平位移监测基准网的观测实践得出以下几点体会:
(1)在水库枢纽区建立精密工程监测基准网,首先是应根据地形地貌和监测部位的分布,选取点位优化网形,再进行精度估算确定经济合理的观测等级,这是建立基准网达到预期精度的重要保证。
(2)采用Leica超高精度全站仪进行自动观测时,选择最佳气象条件是实现观测一次成功的必须前提;如果1个测站出现测回重测频次大于1/3总测回数时,说明该时间段气象梯度变化十分大,应另择时间段重新观测。
(3)对于俯仰角较大或长短边的测站,进行方向观测时,宜采用分组观测。
(4)基准网首期观测应独立进行两次,以保障基准值的精度和可靠性。陕西水利
(责任编辑:畅妮)
TU723
A
猜你喜欢
工矿自动化(2022年1期)2022-01-25
装备维修技术(2020年21期)2020-04-22
中小企业管理与科技·下旬刊(2019年8期)2019-11-09
考试周刊(2019年22期)2019-03-18
航天电子对抗(2018年3期)2018-07-14
测绘科学与工程(2016年6期)2016-04-17
中国学术期刊文摘(2016年8期)2016-02-13
建筑工程技术与设计(2015年17期)2015-10-21
心理与行为研究(2014年1期)2014-04-23
雷达学报(2014年4期)2014-04-23
