
机动航管雷达折叠阵面的全自动展收控制*
2016-09-07 06:21陈玉振彭国朋
电子机械工程 2016年1期
施 勤,陈玉振,彭国朋
(南京电子技术研究所, 江苏 南京 210039)
机动航管雷达折叠阵面的全自动展收控制*
施 勤,陈玉振,彭国朋
(南京电子技术研究所, 江苏 南京 210039)
航管雷达是航空管理系统的重要信息源,而高机动车载航管雷达在紧急情况下,可机动至作战或救援区域实施空中交通管制,弥补了固定航管雷达的不足。文中针对机动航管雷达阵面的可折叠结构形式,采用基于网络构架的模块化控制理念,从硬件电路设计、检测点设计、控制流程设计、软件安全性设计等方面,论述了雷达阵面“一键式”全自动展开和收拢的控制方法,同时从工程运用的实际角度出发,阐述了控制冗余的重要性,极大地提高了车载航管雷达的自动化水平及高机动性能。
航管雷达;机动性;分布式控制;展开和收拢
引 言
目前包含二次雷达的移动式管制中心系统已经得到了可靠运用。随着高机动雷达技术的日益发展,如何将一次雷达与二次雷达融合,实现飞行目标一次/二次相关监视,研发具备高机动性能的车载航管雷达,成为了热点。这种雷达在固定式管制中心系统遭到破坏出现失能时,能够接替其完成管制指挥工作,在战时或应急情况下(比如发生战争、地震或其他应急突发事件时),可迅速抵达指定区域,完成空中交通管制保障任务[1]。
雷达阵面的可折叠是车载机动的前提,如何对折叠机构进行控制,使其迅速可靠地展开或收拢是自动控制的要点。本文针对具有二次天线、馈源机构等折叠结构形式的雷达阵面,基于液压主控模式,提供了雷达阵面机构动作的“一键式”控制策略,极大地简化了操作,并提高了雷达架设撤收的自动化性能。
1 折叠机构的组成
根据实际指标需求,车载机动航管雷达阵面的形状可多种多样,为实现高机动性,折叠机构的设计亦精彩纷呈,而控制模式的不同直接影响其结构形式。目前控制模式主要有液压驱动和电机驱动2大类,这2大类可混合使用。
以基于液压主控模式的主天线抛物阵面为例,它一般由阵面边块的折叠机构(如图1所示)、二次雷达天线的折叠机构、馈源的折叠机构(如图2所示)、阵面整体翻转的折叠机构(如图3所示)等几个部分组成。
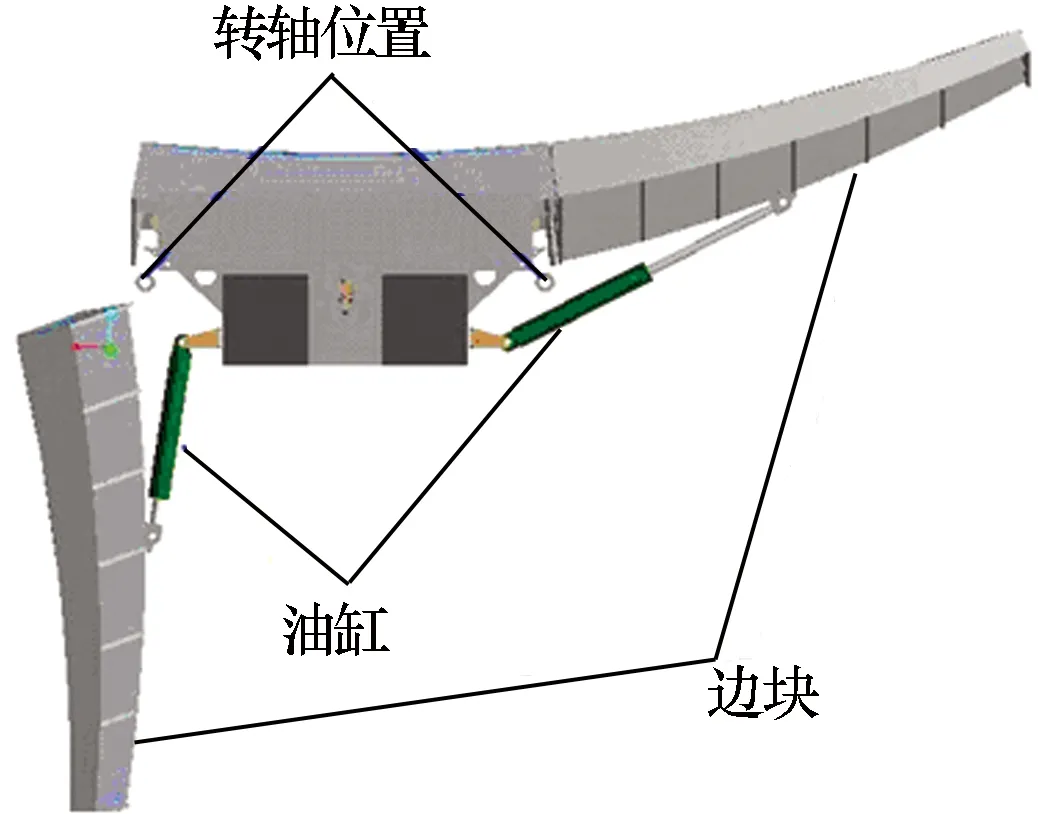
图1 边块折叠机构

图2 馈源折叠机构

图3 阵面整体翻转折叠机构
对于折叠到位的机构,为保证雷达天线工作转动中的稳定性,可采用锁定销、锁钩[2]等锁定装置固定,本文所述的锁定装置采用液压控制模式。
2 硬件控制电路设计
实现全自动控制的关键是对各机构状态的可靠检测。对于可折叠机构,线缆的分布不能过多,运用基于总线传输的现代模块化控制理念,可减少线缆分布。系统由集中控制转化为分布式控制,也将极大地提高系统的可靠性、可测试性及自动化水平。而CAN是当前流行的一种总线形式[3],通过它可搭建全数字、分布式、网络化架构系统,实现分布式控制。
CAN总线控制构架框图如图4所示。采用继电控制模块,实现对各接触器等功率电路的驱动;采用信号检测模块,实现对各检测状态的采集;采用液压阀控模块,实现对各液压阀的控制;采用人机界面控制模块,实现人机交互等。也可通过总线传输控制命令,实现与其他电控模块间的电液混合控制。

图4 CAN总线控制构架
完全集成的混合信号片上系统型MCU可作为各控制模块的核心,这类单片机芯片内集成了CAN2.0B控制器、数字I/O口、可在系统编程的FLASH存储器、可寻址外部数据存储器接口以及SPI、SMBus/I2C、UART等,可完成相应的自动控制功能。
3 检测点设计
折叠机构全自动控制的检测点设计是控制流程得以实现的基础,依据检测内容,大致可以分为以下几类:
1)到位检测。这是机构到位检测中用得最多的一类,目前一般采用感应式接近开关,因为是非接触模式,可靠性较高。
2)角度检测。可以采用旋转变压器进行RDC转换后获取翻转机构角度信息,也可以采用具有CAN总线传输功能的基于电磁感应的绝对编码器作为翻转机构的角度检测。
3)压力检测。对于液压系统而言,油压可以间接反映承载,可以作为过载或油缸行程到位判据,也可以采用直接的承载检测元件完成力的检测。而对于机电系统,还可以采用电流等其他检测参数。
对于锁定销、锁钩等单一检测类型的机构(如图5所示),必须有明确的状态检测,以确保状态的唯一性。例如:锁定销未锁定并不表示其已解锁,反之,锁定销未解锁并不表示其已锁定。必须用2个点各自完成检测功能,如果01表示锁定,则10表示解锁,而00、11均为故障状态。

图5 锁定装置示意图
充分利用检测点的功能,形成联合的复合判据,是提高全自动安全性的必要条件,也是提高控制冗余度的基础。例如:阵面翻转到位检测可以和角度值组合共同形成判定。合理地运用复合判据可以较好地实现全自动安全性与完成率的平衡。检测点设计不周到将降低系统的安全性,但过于冗杂的检查点组合虽然提高了安全性,却降低了完成率,所以必须合理地进行检测点组合设计。
4 控制流程设计
建立严格的控制流程是全自动控制设计中的重要环节,必须充分考虑各种可能发生的干涉及安全性问题。
首先,确定动作顺序。如图6所示,阵面展开时,边块、二次天线可以同时动作。边块展开到位且锁定后,馈源动作;馈源升到位且锁定后,如果二次天线展开到位且锁定,则阵面进行翻转动作;阵面翻转到位且锁定后,流程结束。

图6 阵面展开动作流程图
其次,明确各动作联锁关系,确定联锁约束关系表。以阵面翻转为例,建立某阵面翻转动作约束关系,见表1。必须满足表内所有约束条件,才能进行阵面翻转动作。

表1 阵面翻转约束关系表
最后,必须明确各动作到位的状态判据,并保证控制的冗余度,以确保全自动的可靠性。例如:阵面翻转的前一个动作是边块、馈源、二次天线展开到位并锁定。对于锁定状态的判断必须可靠,不能只依据一次采样结果进行判定,在允许的时间内(如500 ms)每一次的采样结果一致,方能判为有效。
5 软件的安全性设计
随着自动化技术的发展,软件在工程中的作用日趋重要。基于现有的硬件平台,通过软件代码的编制,可以实现非常丰富复杂的流程控制,软件调试也成为后期工程调试的主角。实现全自动流程控制的软件,除按严格的联锁流程进行设计外,其安全性还包含以下几个方面:
1)数据采样的可靠性。为保证全自动的安全性,对获取的各状态信息,运用软件滤波的方式(如α、β滤波或平均值滤波等)剔除野值。滤波会影响动作切换的快速性,但对于动态要求不高的系统可极大地提高系统的安全性。稳定性与快速性的平衡始终是自动控制的精髓所在,需要根据实际工程需求进行权衡。
2)存储数据的丢失检测。某些固定修正误差需要存储在非易失FLASH中,一旦丢失将影响系统精度,因此存储时可通过报文加字头以及CRC校验或简单的和校验等模式进行存储。开机读取时完成数据比对,若发现FLASH数据丢失则报警提示,以避免产生不良后果。
3)交互界面的人性化设计。一目了然的人机界面可提高操作的安全性。菜单模式按功能划分,因而显得清晰,是监控的首选。按照不同的工作需求,可分为操作、调试、BITE检测等菜单。显控界面除了显示所有的检测点状态外,还可根据约束关系表给出允许的动作提示,设计相应的动态效果。
6 工程应用的应急措施
在实际的工程应用中,可能会出现检测元件失效或由结构轻微变形导致的检测位置变化等现象。这种现象一旦出现,全自动控制就将失败,但仅由检测元件问题导致的控制流程失败,并不表示实际动作时的结构干涉。因此,在紧急情况下,在确保机构可动作的前提下,可以采用应急模式,规避掉有故障的检测点,以单步动作的方式完成对雷达阵面的展开和收拢操作。为保证应急操作的可靠性,只能采用单步应急模式而非屏蔽所有检测点的全面应急模式。同时,还可以通过设置密码的方式,使应急模式只对受过培训的专业人员开放。
7 结束语
基于分布式控制理念,采用先进的总线型模块化构架,通过自动控制技术完成的车载航管雷达机电一体化系统的创新性设计,可实现雷达阵面的“一键式”展开和撤收控制,使航管雷达的高机动性成为可能。这一控制模式不仅可推广至地面机动雷达,还可运用于其他工业自动控制系统。
[1] 任胜利. 车载航管雷达的机动性设计[J]. 电子机械工程, 2013, 29(1): 14-17.
[2] 岳振兴. 一种新型锁紧装置在高机动雷达中的应用[J]. 电子机械工程, 2013, 29(3): 29-32.
[3] 杜尚丰. CAN总线测控技术及其应用[M]. 北京: 电子工业出版社, 2007.
施 勤(1966-),女,研究员级高级工程师,主要从事地面情报雷达伺服系统的设计工作。
陈玉振(1982-),男,高级工程师,主要从事雷达机械传动设计与仿真工作。
彭国朋(1981-),男,高级工程师,主要从事雷达液压系统设计与仿真工作。
Automatic Deploying & Retracting Control for Foldable Array of Mobile Air Traffic Control Radar
SHI Qin,CHEN Yu-zhen,PENG Guo-peng
(NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China)
The air traffic control radar is the important information source of the air traffic control system. And the highly mobile vehicle-borne air traffic control radar can be transferred to the battle field or the rescue region to control the air traffic, which compensates the disadvantage of the fixed air traffic control radar. In this paper on the basis of the foldable array structure and the modular control concept based on the network architecture, the one-button automatic deploying and retracting control methods of the radar array are discussed from the hardware circuit design, the test point design, the control procedure design, the software safety design etc. Meanwhile, the importance of the control redundancy is described from the practical application. As a result, the mobility and the automatization level of the vehicle-borne air traffic control radar are greatly improved.
air traffic control radar; mobility; distributed control; deploying & retracting
2015-07-16
TN957.8
A
1008-5300(2016)01-0055-04
猜你喜欢
舰船电子对抗(2022年5期)2022-11-25
现代苏州(2022年9期)2022-05-26
电子机械工程(2022年2期)2022-04-25
文萃报·周五版(2022年9期)2022-03-11
快乐语文(2021年15期)2021-06-15
舰船电子对抗(2021年1期)2021-04-15
童话世界(2020年13期)2020-06-15
模具制造(2019年7期)2019-09-25
故事大王(2019年4期)2019-05-14
计算机测量与控制(2017年6期)2017-07-01
