
一种反馈式自适应振动控制方法研究
2016-09-18 02:58刘锦春何其伟朱石坚陈章位
振动与冲击 2016年16期
刘锦春 , 何其伟 , 朱石坚 , 陈章位
(1.海军工程大学 动力工程学院,武汉 430033; 2.浙江大学 流体动力与机电系统国家重点实验室,杭州 310027)
一种反馈式自适应振动控制方法研究
刘锦春1, 何其伟1, 朱石坚1, 陈章位2
(1.海军工程大学 动力工程学院,武汉430033; 2.浙江大学 流体动力与机电系统国家重点实验室,杭州310027)
对一种反馈式的线谱振动自适应主动控制方法的参考信号生成方法进行了研究,分析了该参考信号生成方法的基本原理和不足,并对此进行了改进,抑制参考信号生成中,背景噪声引起的参考信号幅值波动。然后,通过应用改进的参考信号生成方法,形成了新的反馈式自适应控制方法。最后,进行了仿真分析和基于主动控制平台的试验研究。仿真结果表明,相比原算法,改进后的反馈式自适应控制方法具有更快的收敛特性和较小的稳态误差;在相同的高背景噪声和大步长系数下,改进算法具有更好的抗噪稳定性能。试验结果表明,改进后的算法能够在参考信号与振源信号存在频率偏差的情况下,对多频振动信号取得有效的主动控制效果。
自适应反馈;主动控制;振动控制
周期性旋转机械设备引发的线谱振动噪声,影响船舶声隐身性能。在被动隔振的基础上,采用振动主动控制方法是降低和抑制线谱振动噪声传播的有效方手段。主动控制方法可以有效的弥补被动隔振方法的低频性能[1-2]。主动控制的研究主要围绕控制律,执行机构及其布置方式等展开[2]。其中,控制策略是影响主动控制的效果的关键因素之一。主动控制的控制策略有多种,如重复控制、自适应控制等[2-3]。在众多主动控制策略当中,自适应FXLMS控制方法由于其对模型参数不够敏感,稳定好,易于实现,因而在工程中应用较为广泛[2,5]。
针对线谱振动的窄带自适应FXLMS(Filtered-X Least Mean Square)控制方法,其性能与参考信号密切相关。当参考信号频率与线谱振源信号频率不存在偏差时,窄带自适应FXLMS控制方法能取得理想的抑制效果。但是,在实际应用中,往往很难获得与实际线谱振源信号频率较为一致的参考信号。此时,参考信号频率与线谱振源信号频率存在偏差,可能会引起窄带自适应FXLMS控制算法性能下降[6-9]。解决这里问题的有效方法之一是采用反馈式自适应控制方法[6,8,10-14]。众多研究学者采用频率估计方法重新估计合成的振源信号频率,并生成与线谱振源信号频率一致的参考信号,从而取得良好的控制效果。此外,针对此问题,XIAO等[9]提出利用二阶AR(Auto Regressive)模型对参考信号进行处理,并以此模型,在频率补偿子系统中,估计线谱振源信号频率的相关参数,实现了参考信号的生成。该方法能够解决频率偏差存在引起的控制算性能下降问题。基于二阶AR模型的参考信号处理方法,已和FXLMS、FXRLS(Filtered-X Recursive Least Square)算法进行结合,形成了多个自适应控制方法[14-17]。文献[17]以XIAO的算法为基础,基于动量最小均方方法,通过基于加权累加的性能函数,形成了改进的频率补偿子系统。改进后的方法具有更强的收敛性能。但在这些研究中,对基于二阶AR模型的参考信号生成方法的原理阐述还未有相关涉及。
本文针对此基于二阶AR模型的参考信号生成方法的原理进行了研究,分析了这种参考信号生成方法的原理,并分析了背景噪声对参考信号的影响,进而形成了新的参考信号生成方法。然后,应用此方法,对XIAO和文献[17]中基于FXLMS的反馈式自适应控制方法进行分别改进。改进后的方法具有更快的收敛速度和更小的稳态误差。仿真表明,基于这种改进的参考信号生成方法,能够有效提高原算法的性能。在高背景噪声和大步长条件下,改进的算法具有更好的稳定性能。
1 反馈式自适应控制算法
文献[9]在一种二阶AR模型进行参考信号处理的基础上,提出了一种反馈式FXLMS自适应主动控制系统。该方法能够在参考信号频率与目标线谱振源信号频率存在偏差时,通过调节参考信号的生成,使得参考信号频率与线谱振动信号频率一致,从而获得良好的控制效果。
设背景噪声为v(n)的线谱振源信号为:
式中,ai、bi为幅值系数,i=1,…,q,q是谐波信号的数目,ω0,i是第i个谐波的频率,v(n)是方差为σ2的背景噪声。
算法内容详细如下。
xai(n)=-ci(n)xai(n-1)-xai(n-2)
n≥2,xai(0)=1,xai(1)=cos(ωi(0))
(2)
xbi(n)=-ci(n)xbi(n-1)-xbi(n-2)
n≥2,xbi(0)=0,xbi(1)=sin(ωi(0))
(3)
(4)

(5)
(6)
(7)
ci(n+1)=ci(n)-μcie(n)×
ci(1)=-2cos(ωi(0))
(8)

(9)
(10)
多名研究者在该算法的基础上进行了相关改进,提出了多个自适应控制算法[14-17]。这些改进算法中对式(2)、(3)的参考信号更新原理未进行相关的阐述。或将其认为是二阶自回归模型的滤波器,其功能是对参考信号进行滤波。对此,提出一种基于几何关系的解释,能更好的阐述该方法的原理和不足。
设一向量信号γn,i的实部和虚部分别为:xai(n)、xbi(n),其幅值为An,i,即γn,i=An,iejφi(n);则式(2)、(3)可表述为
γn,i=-ci(n)γn-1,i-γn-2,i=
[ejωi(n)+e-jωi(n)]γn-1,i-γn-2,i
(11)
其对应的几何关系,如图1所示。

图1 参考信号更新Fig.1 Generation of reference signal
由图1几何关系可知,γn,i和-ci(n)γn-1,i之间的相位差为Δφi(n),Δφi(n)=φi(n)-φi(n-1);-γn-2,j和-ci(n)γn-1,i之间的相位差为π-Δφi(n-1)。由以上关系,可得
An,icos(Δφi(n))+
An-2,icos(Δφi(n-1))=-ci(n)An-1,i
(12)
由式(12)可知,该参考信号更新方法包含相位信息的更新和幅值信息的更新。现通过以下分析,说明背景噪声会引起参考信号幅值的波动。
若该算法收敛,并且算法保持稳定的稳态性能,则在收敛时,参考信号频率等于线谱振动信号的频率,同时,参考信号的幅值保持稳定。
在稳态条件下,n-1时刻,则更新式(12)为
An,icos(ω0,i)+An-2,icos(ω0,i)=2cos(ω0,i)An-1,i(13)
此时,An,i=An-1,i=An-2,i。由式(8)可知,背景噪声v(n)的存在必然导致ci(n)的波动。现在n时刻,引入背景噪声对ci(n)的影响。设ci(n)=-2cos(ω0,i+Δωi),Δωi为噪声引起的估计频率的变化;Δωi≠0。则式(12)变为
2An-1,icos(ω0,i+Δω,i)
(14)

2An-1,i(cosΔωi-1/2)× cos(ω0,i)-
2An-1,isinΔωi×sin(ω0,i)
(15)
即可得关系式如下:
(16)
(17)
从式(17)可以得到如下结论:无背景噪声时,该控制算法能够保持幅值和频率的稳定;背景噪声存在的时,背景噪声必然引起参考信号的幅值波动。结合算法的总体结构,可知,控制器权系数更新方程——式(4)具有调节参考信号的幅值功能,因而可以在一定程度上补偿背景噪声的影响。但是,当背景噪声超过某一临界值时,参考信号幅值的增加将引起系统的发散。
若背景噪声水平较低,步长系数μc较小时, Δω→0,幅值的增加是非常缓慢的,可通过式(4)进行补偿,对性能无较大影响;当背景噪声水平较高,μc较大时,则式(4)无法补偿,算法无法保证稳定。
为使得算法功能更加稳定,现通过以下方法使得参考信号更新环节只包含相位信息的更新,去除幅值信息更新。式(11)化为
γn,i,0=-ci(n)γn-1,i-γn-2,i
(18)
γn,i=γn,i,0/An,i,0
(19)
式中,An,i,0为其幅值。
γn,i,0=xai,0(n)+jxbi,0(n)
(20)
则式(2)、(3)化为
xai,0(n)=-ci(n)xai(n-1)-xai(n-2)
(21)
xbi,0(n)=-ci(n)xbi(n-1)-xbi(n-2)
(22)
(23)
(24)
式(21)~(24)对应的几何关系如图2所示。则式(12)可化为
An,i,0cos(Δφi(n))+cos(Δφi(n-1))=-ci(n) (25)
因而,当频率相关系数ci(n)收敛时,可得
(26)
此时,可认为成功生成了幅值为1,频率为ωi(n)的参考信号。

图2 参考信号更新Fig.2 Generation of reference signal
2 改进的控制算法
2.1改进的算法1
参考信号更新环节进行了细微的修改,排除了背景噪声引入的幅值波动。应用式(21)~(24),对式(8)进行改进。ci(n)更新方程修改为
(27)

-e(n)xs,i
(28)
式中,s是误差通道,*表示卷积运算;xs,i为


(29)
(30)
(31)
结合式(27)~(31),可得到新的ci(n)更新方程为
ci(n+1) =ci(n)+μcie(n)xs,i(n)
(32)
其中,

xaj(n)xbi(n)xbi(n-1)]/An,i,0}+
xai2(n)xbi(n-1)]/An,i,0}
因而,式(4)~(7)、(21)~(24)、(32)形成了改进的算法1。算法结构如图3所示,符号N表示进行式(21)~(24)的归一化处理。如图3所示,通过归一化处理,使得算法的相位更新和幅值更新功能明确分开,功能更加清晰。对比式(32)和(8),可知,采用新的参考信号更新方法后,频率相关系数更新方程发生较大改变。因而,改进前后算法的性能将存在差异。

图3 改进的算法1的结构原理图Fig.3 Block diagram of the improved algorithm 1
2.2改进的算法2
文献[17]基于动量最小均方方法(Momentum Least Mean Square,MLMS)思想,以文献[9]控制算法为基础,对频率相关系数更新式(8)进行了改进,形成了新的自适应控制算法2(式(2)~(8)及式(33)),但其对于参考信号的生成方法仍然是基于式(2)、(3)。该算法ci(n)控制方程为
ci(n+1)=ci(n)-
λc{ci(n)-ci(n-1)}
(33)
式中,λc为收敛因子。
同理,应用新的参考信号生成方法(式(21)~(24)),ci(n)控制算法式(33)可改进如下。
ci(n)控制方程为
(34)
式中:性能代价函数Jci(n)为
(35)
因此,基于相同原理,式(33)可以改进,并简化为
(36)
对比式(33)与式(36),可以得出以下结论:随着参考信号生成方法的改变,ci(n)控制算法结构也随之发生变化,从而导致整体系统的性能也随之发生改变。
3 仿 真
为了检测新的参考信号生成方法应用前后,算法的性能差异,进行了matlab仿真分析。
控制算法的性能与ci(n)的收敛结果密切相关,现定义ci(n)的均方误差值为
MSEci(n)=E{[ci(n)-c0,i]2}
其中,c0,i为实际线谱频率对应的相关系数。通过观察MSEci(n)的收敛曲线,比较算法的性能差异。
仿真1:

仿真结果如图4所示。由图4可知,改进后的算法,ci(n)具有更低的稳态误差;由图4(a)、图4(b)可知,收敛初期,改进前后算法的收敛性能未发生明显变化,但是新算法稳态误差更小。由图4(c)可知,在谐波频率较高时(ω0,i=0.3π),改进后的算法具有更快的收敛速度。

仿真2:

其中,μc=0.001,信噪比为10 dB时,原算法1典型仿真结果如图5所示。由图5(a)可知,算法初期能够收敛,但是随着时间的增加,参考信号幅值不断加大,在n=6×106时,幅值超过某一临界值时,算法突然发散。
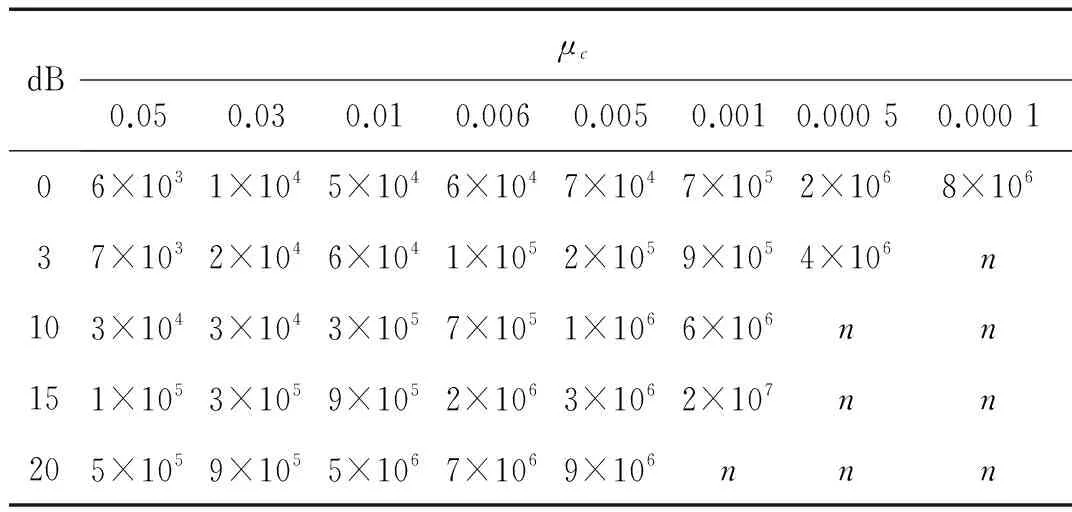
表1 原算法1失去稳定时的迭代次数
从表1可以看出,随着背景噪声的降低和步长系数的减小,算法发散时的迭代次数也随着增加。

(a) c1(n)

图5 原算法1的性能Fig.5 Performance of the original algorithm 1
然而,在同等条件下,改进算法1的仿真结果表明,改进算法1均能保持长期稳定。
当μc足够小和背景噪声水平较低,算法保持稳定的时间量级将成指数级增加。因而,可得出结论:新的参考信号生成方法,改善了原系统在高背景噪声和大步长系数μc情况下的稳定性能,即新算法具有更稳定的步长上界。
仿真3:

仿真结果如图6所示。对比图6(a)~(c)可知,改进后的算法,ci(n)的估计结果具有更低的稳态误差;从图6(a)、(b)曲线可以看出,改进算法2具有更快的收敛性能。从图6(b)收敛结果可知,原算法的稳态性能存在波动,新算法稳态性能更好。

(a) c1(n)均方误差值 (b) c2(n)均方误差值 (c) c3(n)均方误差值图6 改进算法2前后的ci(n)均方误差值Fig.6 Mean squared ci(n) of the improved algorithm 2 and the original algorithm
4 试 验
为了检测改进算法2对多线谱振动的主动控制效果,建立了如图7所示的主动控制试验系统。该系统主要是由激振器(模拟振源),橡胶隔振器,电磁作动器,柔性板,加速度传感器,基于c6747芯片的DSP控制器,以及功率放大器组成。如图7所示,作动器和一个质量块构成主动控制元件,用于控制下层的振动。通过导杆固定,使得双层平台沿着竖直方向振动。加速度传感安装在下层弹性板,用于监控下层的残余误差信号。从控制器输出到下层板振动的主动控制误差通道传递特性如图8所示。

图7 主动控制系统Fig.7 Active vibration control system

图8 误差通道传递特性Fig.8 Transfer function of error path
实验中,模拟振源含有三个谐波频率成分(50 Hz,100 Hz,150 Hz)。以下层加速度传感器信号为残余误差信号,用于合成参考信号,构建主动控制力,对下层弹性板振动进行抑制。采样频率为1 kHz。参考信号的频率初值为52.5 Hz,105 Hz,157.5 Hz。自适应控制前后,下层加速度信号频域曲线如图9所示。
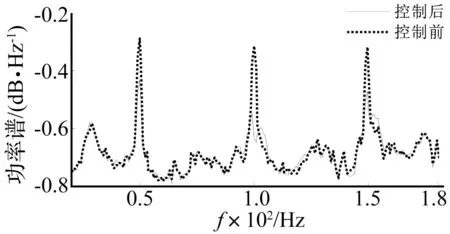
图9 控制前后频域响应Fig.9 Frequency response with and without control
通过比较控制前后残余误差信号谐波的幅值可知,该方法能够在参考信号频率与实际振源频率存在一定偏差的情况下,有效的抑制线谱振动。
5 结 论
本文针对一种反馈式自适应控制方法,通过分析其参考信号生成方法的基本原理,并加以改进,形成了改进的自适应控制方法。仿真分析表明,相比原方法,改进后的方法具有以下优点。
(1) 在参考信号生成方法中,对新生成的参考信号进行归一化处理,将使得整体系统的功能结构更加清晰;对于同一控制结构(ci(n)控制方程)的反馈式自适应控制算法,应用新的参考信号生成方法后,系统将具有更好的稳态性能。
(2) 不考虑误差通道的影响,在相同的高背景噪声和大步长系数μc条件下,改进系统具有更好的稳定性和更高的步长上界。
基于双层台架的自适应主动控制试验表明,改进的算法能够在参考信号频率与振源信号频率存在偏差时,跟踪振源信号频率,取得良好的振动控制效果。
[1] DALEY S, JOHNSON F A, PEARSON J B, et al. Active vibration control for marine applications[J]. Control Engineering Practice, 2004(12):465-474.
[2] HANSEN C H, SNYDER S D, QIU Xiaojun, et al. Active control of noise and vibration [M]. Boca Raton, FL,USA: Taylor & Francis, 2013.
[3] DALEY S, HATONEN J,OWENS D H. Active vibration isolation in a “Smart Spring” mount using a repetitive control approach [J]. Control Engineering Practice,2006,14(9) :991-997.
[4] 赵国迁, 张洪田. 柴油机管道系统全主动吸振技术实验研究[J]. 噪声与振动控制, 2007,27(5): 46-49.
ZHAO Guoqian,ZHANG Hongtian. Study on actively absorbed vibration damping technique for a diesel piping system[J]. Noise and Vibration Control, 2007,27(5): 46-49.
[5] KUO S M, KUO K, WOON-SENG G. Active noise control: open problems and challenges[C]//Green Circuits and Systems,2010 International Conference on. Shanghai:ICGCS,2010:164-169.
[6] HYEON-JIN J, TAE-GYU C, SUNGWOOK Y, et al. A narrowband active noise control system with frequency corrector[J]. IEEE Transactions on Audio, Speech, and Language Processing, 2011, 19(4): 990-1002.
[7] HYEON-JIN J, TAE-GYU C, KUO S M. Analysis of frequency mismatch in narrowband active noise control[J]. IEEE Transactions on Audio, Speech, and Language Processing, 2010, 18(6): 1632-1642.
[8] KUO S M, NALLABOLU S P. Analysis and correction of frequency error in electronic mufflers using narrowband active noise control[C]// IEEE International Conference on Control Applications. Piscataway,NJ,USA:IEEE, 2007: 1353-1358.
[9] XIAO Y, MA L, KHORASANI K, et al. A new robust narrowband active noise control system in the presence of frequency mismatch[J]. IEEE Transactions on Audio, Speech, and Language Processing, 2006, 14(6): 2189-2200.
[10] 张磊,刘永光,付永领,等. 基于自适应陷波器的主动隔振仿真研究[J]. 系统仿真学报, 2005, 17(1): 234-237.
ZHANG Lei, LIU Yongguang, FU Yongling, et al.Study on simulation of AVI based on adaptive notch filter[J]. Journal of System Simulation, 2005, 17(1): 234-237.
[11] 张志谊,王俊芳, 周建鹏,等.基于跟踪滤波的自适应振动控制[J]. 振动与冲击, 2009, 28(2): 64-67.
ZHANG Zhiyi, WANG Junfang, ZHOU Jianpeng, et al.Adaptive vibration control with tracking filters[J]. Journal of Vibration and Shock, 2009, 28(2): 64-67.
[12] KIM S, PARK Y. Active control of multi-tonal noise with reference generator based on on-line frequency estimation[J]. Journal of Sound and Vibration, 1999, 227(3): 647-666.
[13] KIM S, PARK Y. On-line fundamental frequency tracking method for harmonic signal and application to ANC[J]. Journal of Sound and Vibration, 2001, 241(4): 681-691.
[14] XIAO Y, MA L, KHORASANI K, et al. A filtered-X RLS based narrowband active noise control system in the presence of frequency mismatch[J]. IEEE International Symposium on Circuits and Systems,2005,1:260-263.
[15] XIAO Y. JING W.A new efficient narrowband active noise control system and its performance analysis[J]. IEEE Trans, Audio, Speech Process,2011,19(7):1865-1874.
[16] HUANG B, WEN L, SUN J, et al. A variable step-size frequency mismatch compensation algorithm for narrowband active noise control[C]. ICSV21, Beijing,China,2014.
[17] 黄博妍,常琳,马亚平,等. 一种应对非平稳频率失调的窄带主动噪声控制系统[J]. 自动化学报, 2015, 41(1): 186-193.
HUANG Boyan, CHANG Lin, MA Yaping, et al. A new narrowband ANC system against nonstationary frequency mismatch[J]. Acta Automatica Sinica,2015,41(1):186-193.
An adaptive feedback vibration control algorithm
LIU Jinchun1, HE Qiwei1, ZHU Shijian1,CHEN Zhangwei2
(1. Naval University of Engineering, Wuhan 430033, China;2. The State Key Lab of Fluid Power and Control, Zhejiang University, Hangzhou 310027, China)
An adaptive feedback vibration control algorithm was studied to analyze the basic concept of reference signal generator. The defect of the reference signal generator was derived. Modification of the generator was implemented to suppress the fluctuation of reference signal amplitude induced by additive noise. With the modified reference signal generator, the modified algorithm was proposed. Finally, simulations and experiment based on an active vibration system were performed. Simulation results demonstrate that the modified algorithm has a better convergence and yields less means squared error at steady state, and that the modified algorithm has a better anti-noise stability. Experiment results confirm that the modified algorithm can effectively suppress the vibration of multi-spectra with the existence of frequency error between the primary signal and the reference signal.
adaptive feedback; active control; vibration control
国家自然科学基金青年科学基金资助项目(51009143);高等学校博士学科专项资金资助项目(201057)
2015-04-21修改稿收到日期:2015-09-08
刘锦春 男,博士生,1987年生
朱石坚 男,教授,博士生导师,1955年生
O32
A
10.13465/j.cnki.jvs.2016.16.022
猜你喜欢
噪声与振动控制(2022年3期)2022-07-04
舰船科学技术(2022年10期)2022-06-17
地震研究(2021年1期)2021-04-13
兵工学报(2020年9期)2020-11-24
船海工程(2019年1期)2019-03-04
地震研究(2017年3期)2017-11-06
电子制作(2017年9期)2017-04-17
中外管理(2015年3期)2015-03-18
舰船科学技术(2015年8期)2015-02-27
舰船科学技术(2014年5期)2014-03-08
