
基于Maxwell的混合式步进电机的仿真设计和结构分析
2016-09-23 03:32丁亚军2
导航与控制 2016年3期
贾 博,丁亚军2,杨 通
(1.中国航空综合技术研究所,北京100028;2.中国航天科技集团公司,北京100048;3.北京航天控制仪器研究所,北京100039)
基于Maxwell的混合式步进电机的仿真设计和结构分析
贾 博1,丁亚军2,杨 通3
(1.中国航空综合技术研究所,北京100028;2.中国航天科技集团公司,北京100048;3.北京航天控制仪器研究所,北京100039)
介绍了一种太阳能帆板驱动系统用混合式步进电机的设计和仿真方法,采用该方法得到了混合式步进电机的最佳齿形和结构数据。提出了一种等效二维有限元模型,将三维磁路转化为平面磁路,该模型有较高的仿真精度,同时对计算机的要求较低。利用该模型对不同的齿宽齿距比、齿宽齿高比和常用的结构形式进行比较,得出该电机的最优方案;同时,对混合式步进电机定转子不同齿距的结构进行仿真,得出其性能指标,分析不同情况的效果。
混合式步进电机;有限元分析;保持力矩
0 引言
混合式步进电机是一种定子激磁,转子带有永磁体,定转子磁极多齿结构的电机。其转子分为2段或2的倍数段,相邻2段铁芯相互错开1/2齿距,中间夹有轴向充磁的永磁体,转矩由定子绕组磁势和转子永磁磁场相互作用产生[1]。由于在开环控制领域具有较高的精度,混合式步进电机广泛应用于空间、办公自动化和工业自动化等领域[2-4]。我们知道,步进电机传统的力矩计算是通过齿层比磁导法实现的,但是该方法对普通磁阻式的步进电机具有较高的精度,由于混合式步进电机转子存在轴向磁路,气隙磁密分布复杂,用齿层比磁导法计算误差较大;三维有限元分析是一种较为精确的分析方法,能够实现轴径向磁路的耦合,最大程度地还原电机的实际磁场情况,但是,由于步进电机的气隙相对于定转子齿宽等结构非常小,通常只有几道,所以要实现气隙的多层剖分,达到较好的网格效果,网格数往往达到上百万甚至更多,在没有较好的硬件支持下,计算时间相当长,甚至无法启动计算。本文提出一种二维模型,它将定转子展开,形成二维磁路,并将具有轴向磁路的磁钢,等效投影到二维磁路当中。
1 二维有限元等效方法
混合式步进电机力矩参数齿层比磁导法计算的数学模型:

以四相混合式步进电机为例,电机的等效二维模型如图1所示,定子极、轭、定转子的小齿宽和高、转子磁钢的厚度均按实际尺寸建立,圆周上的8个极按顺时针方向从1~8编号,位置关系如图1所示,1号极的小齿与转子对齐,2号极小齿与转子错1/4齿距,3号极小齿与转子错半个齿距,4号极小齿与转子错3/4个齿距,5号极小齿与转子错半个齿距,6号极小齿与转子错3/4个齿距,7号极小齿与转子齿对齐,8号极小齿与转子错1/4个齿距。磁钢面积S是根据整个电机各段磁钢的面积总和均布在两转子之间。为了形成完整的磁路,两段轭之间由低磁阻材料等效,在该部分的磁压降可忽略不计。
利用上述模型对用电机进行了仿真,并加工了样机,如图2所示,经计算样机额定工作状态下保持力矩为 318mN·m,空载定位力矩为99.75 mN·m;而实际试验数据样机保持力矩为307 mN·m,定位力矩为107 mN·m;保持力矩和定位力矩的计算有较高精度。计算波形数据与实测波形数据如图3和图4所示,仿真数据能够较好地反映实际情况。

图1 二维有限元建模Fig.1 2D finite element model of the hybrid stepper motor

图2 混合式步进电机样机Fig.2 Prototype hybrid stepper motor

图3 样机有限元计算保持力矩波形Fig.3 Holding torque based Maxwell

图4 样机实测保持力矩波形Fig.4 Holding torque based actual measurement
2 电机参数分析
2.1齿宽、齿高对保持力矩和定位力矩的影响
利用上述模型对电机的一些重要参数进行仿真,对定子齿宽齿距比0.35~0.5、齿高齿距比0.35~0.5范围内进行扫描,仿真分析得到数据如表1和表2所示。
从表1和表2可以看出,齿高对保持力矩和定位力矩的影响很小,而齿宽的影响相对较大,保持力矩在0.38的时候达到最大,定位力矩在齿宽齿距比为0.35~0.5的范围内,随该值的增大而减小。综合考虑两方面影响,选取齿宽齿距比为0.42~0.44间为宜,这种情况下保持力矩虽然不是最大,但下降幅度较小,定位力矩相对较小。上述观点可以由图5更为形象地表述,图5中所示波形为定转子齿宽0.68mm、0.79mm、0.83mm以及定子齿宽0.82转子齿宽0.68情况下的保持力矩的仿真结果,随着齿宽变大,保持力矩峰值变小,并变得平缓;此外,从5图中还可以看出,如果想兼顾波形和幅值,定转子不同齿宽是一个较好的处理方法,这种情况可以获得较好的波形,而且对幅值的影响较小。

表1 保持力矩峰值数据Table 1 Peak date of holding torque
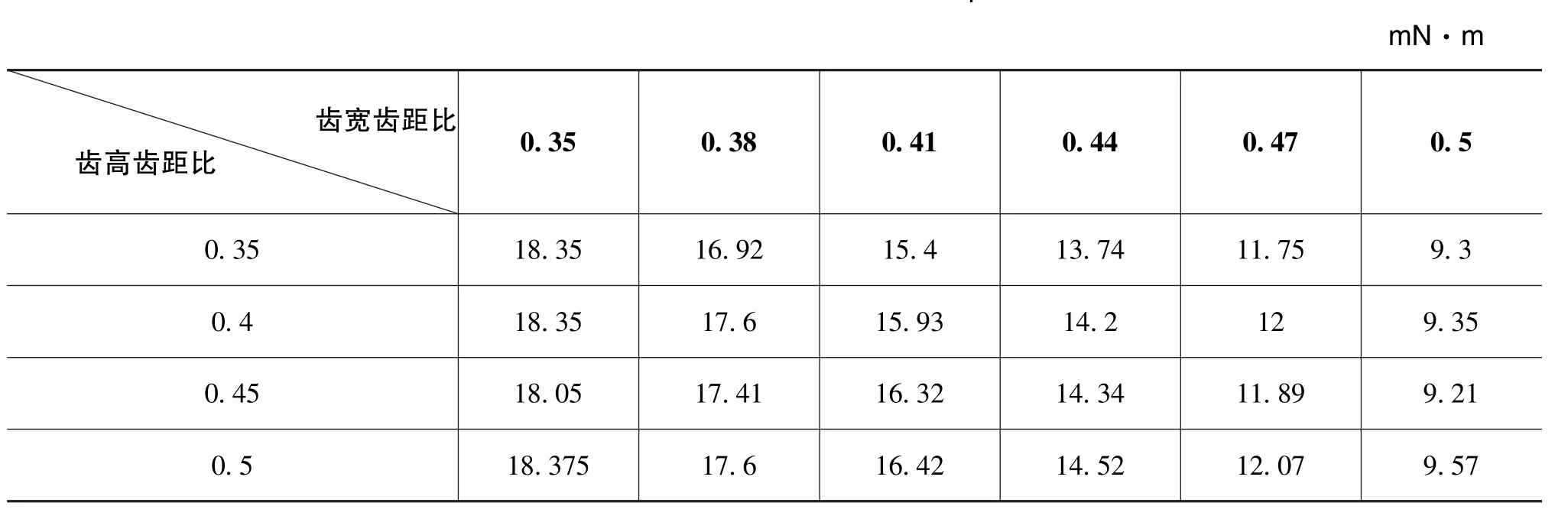
表2 定位力矩峰值数据Table 2 Peak date of detent torque

图5 各种齿宽保持力矩波形Fig.5 Variation of holding torque-different tooth width
2.2减小定位力矩、改善保持力矩波形方法分析
通过上述分析可以知道,选择合适的齿宽能够减小定位力矩、改善保持力矩波形。混合式力矩电机的定位力矩由不通电状态下电机磁共能的变化产生,即定位力矩的大小等于磁共能变化的梯度:

下面我们对时下常用的一些减小定位力矩、改善保持力矩波形的方法进行分析、比较。常用的方法有:定转子不同齿宽,圆形槽底、梯形槽、定转子不同齿距等。
保持其他参数不变,对不同定转子齿宽配合进行仿真,比较性能参数值如表3所示。首先,从第一种配合情况的数据看出,定转子不同齿宽可以减小定位力矩,而且差异较大时效果明显;其次,齿宽不同时,各种组合的性能接近,没有大的区别,但定转子等齿宽的情况比不等齿宽的情况保持力矩和定位力矩都大10%左右。
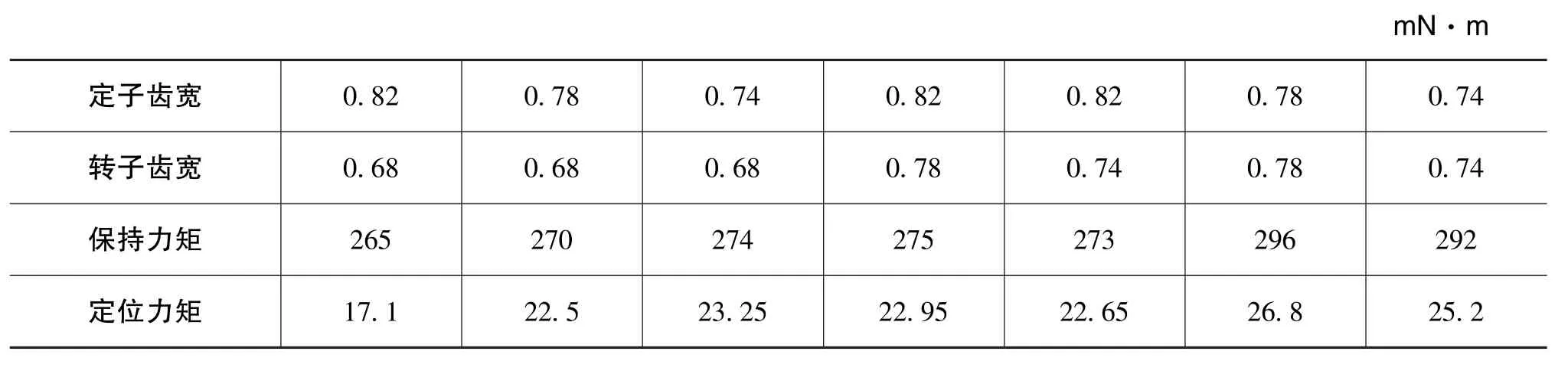
表3 不同齿宽组合的性能参数比较Table 3 Variation of the characteristics-different tooth width combination
图6为采取圆形槽底、梯形槽、定转子不同齿距等方法的保持力矩波形,从图6中可以看出,梯形槽方法没有明显效果,同时力矩峰值也是最大的;采用圆形槽底的方法,可以改善力矩波形,减小谐波含量,效果较为明显;而不同齿距的方法可以基本消除高次谐波,明显减小定位力矩,保持力矩波形接近正弦波,是效果最好的方案,当然,力矩峰值也相应明显减小。图7是等齿距与不等齿距情况下,定位力矩波形的仿真结果比较,可以看出效果十分明显。
3 结论
本文通过一种等效的2D模型,对混合式步进电机中大家比较关注的结构和参数进行比较,对每种结构和参数的保持力矩和定位力矩进行比较,其中涉及齿宽齿距比、齿高齿距比、定转子不同齿宽,圆形槽底、梯形槽、定转子不同齿距等。通过比较得出:齿宽齿距比选取0.42~0.44间为宜,若追求大保持力矩可以选取更小的齿宽;在减小定位力矩的方案中,定转子不同齿距是最好的方案,定转子不同齿宽也有10%的减小效果,但同时也会减小10%的保持力矩,在追求低定位力矩的情况下可以选用。对一种电机方案试制了样机并进行测试,测试结果能够较好地反映仿真数据。

图6 齿部结构对保持力矩的影响Fig.6 Variation of holding torque-different tooth configuration

图7 齿距改变前后定位力矩Fig.7 Variation of detent torque-different tooth configuration
[1] 王宗培.微特电机设计程序[M].上海:上海科技出版社,1983. WANG Zong-pei.Design process of special type motor [M].Shanghai: ShanghaiScienceandTechnology Press,1983.
[2] B.C.Kuo.Step motors and control systems[M].SRL Publishing,1979.
[3] Hunt.Motors take it a step at a time[J].Design Engineer Magazine,March,1991.
[4] T.Kosaka.3 Dimensional finite element analysis of hybrid stepping motors taking inter-lamination gap into account [J].TheInstitutionofElectricalEngineers,2004:534-539.
[5] Praveen R.P.Design and finite element analysis of hybrid stepper motor for spacecraft applications[J].IEEE,2009:1051-1057.
Design of Hybrid Stepper Motor Used for Solar Panel Driven System
JIA Bo1,DING Ya-jun2,YANG Tong3
(1.AVIC China Aero-polytechnology Establishiment,Beijing 100028;2.China Aerospace Science and Technology Corporation,Beijing 100048;3.Beijing Institute of Aerospace Control Devices,Beijing 100039)
The design and simulation method for the hybrid stepper motor(HSM),used for solar panel driven system,is proposed.The HSM's optimal tooth shape and structure are obtained with the method.An equivalent two-dimensional finite element model,which converts three-dimensional magnetic circuits to planar ones,is introduced.The model provides highly accurate simulation results and spends lower computational cost.The models with different tooth width/tooth pithratio,tooth width/ tooth height ratio and tooth shape are simulated and compared,and the optimal structural design is achieved.Meanwhile,the performances of HSMs having different stator/rotor tooth pitch are also analyzed with the proposed model.
hybrid stepper motor;finite element analysis;holding torque
TM3
A
1674-5558(2016)03-01157
10.3969/j.issn.1674-5558.2016.03.014
2015-07-10
贾博,男,硕士,工程师,研究方向为电机本体设计。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
电气电子教学学报(2022年2期)2022-05-23
房地产导刊(2020年6期)2020-07-25
科技风(2019年6期)2019-10-21
计算机与网络(2018年4期)2018-09-10
汽车实用技术(2018年16期)2018-09-06
中国计算机报(2018年20期)2018-08-28
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
航天制造技术(2016年6期)2016-05-09
