
基于无人机遥感技术的港湾养殖区监测
2016-10-18 00:52张彩云张永年李雪丁商少凌
厦门大学学报(自然科学版) 2016年5期
闫 静,张彩云,,张永年,李雪丁,张 宁,江 山,商少凌,*
(1.厦门大学水声通信与海洋信息技术教育部重点实验室,福建厦门361005;2.厦门大学近海海洋环境科学国家重点实验室,福建厦门361102;3.福建省测绘院,福建福州350003;4.福建省海洋预报台,福建福州350003)

基于无人机遥感技术的港湾养殖区监测
闫静1,张彩云1,2,张永年3,李雪丁4,张宁2,江山2,商少凌1,2*
(1.厦门大学水声通信与海洋信息技术教育部重点实验室,福建厦门361005;2.厦门大学近海海洋环境科学国家重点实验室,福建厦门361102;3.福建省测绘院,福建福州350003;4.福建省海洋预报台,福建福州350003)
无人机(unmanned aerial vehicle,UAV)遥感具有高时效、机动灵活、高分辨率的特点,探索应用UAV遥感平台对沿海养殖区进行监测,实时掌握养殖发展动态,开展灾后应急监测,显然具有重要意义.利用UAV获取的CCD相机光谱信息,建立渔排监测指数,提出了渔排监测指数阈值快速提取算法;并针对渔排本身混合了水体和木筏2种目标物的特性,对提取结果进行图像闭合算子运算.在福建沿海古雷和可门港的实验结果表明,基于UAV获取的数据影像,利用渔排监测指数快速提取算法估算的渔排面积精度在两个区域分别达到98.9%和97.4%,与传统遥感分类方法——最大似然法相比,在同一计算平台上,计算速度提高5倍,无论精度或速度都可满足海洋与渔业管理部门在业务上的快速响应需求.此外应用UAV,以苏迪罗台风过后的三都澳海区为例,尝试开展了台风灾害造成的渔排损毁分析,初步推算出台风造成的渔排损毁面积比例.该研究表明利用UAV遥感可以为渔业管理提供有效的技术支持.
无人机(UAV);渔排;快速检测
随着遥感技术的发展,无人机(unmanned aerial vehicle,UAV)逐渐进入了民用领域.UAV是一种机上无人驾驶的航空器,其具有动力装置和导航模块,在一定范围内靠无线电遥控设备或计算机预编程序自主控制飞行[1].目前UAV主要用于国土资源环境调查、城市管理、地震、泥石流、滑坡、洪涝、火灾等灾害调查[2-6],在渔业信息方面的应用还比较有限.但是UAV的特性决定了它在渔业监测方面有着其独特的优势.UAV具有地面分辨率高、机动灵活、快速响应的特点,避免了应用其他遥感手段时受制于飞行重复周期以及云覆盖等带来的无法获取有效图像的困扰.应用UAV遥感平台,可以对不同季节沿海养殖区进行监测,实时掌握海洋渔业发展动态.同时由于它的快速响应的特性,可以用来评估台风等自然灾害对渔业造成的影响.
目前民用UAV上搭载的传感器主要是三通道的CCD相机,UAV图像的解译很大程度上还是依赖于人工解译.这种解译方式受限于解译人员的专业经验,工作量大,效率较低.而海洋渔业等政府部门需要对渔业信息进行业务化的监测和管理,这要求图像检测方法必须简单、快速、人工干预少.所以发展一种针对UAV影像的快速提取方法是十分必要的.本研究将针对福建沿海港湾内主要的养殖区域,探索利用UAV系统对渔排面积及灾害损失进行快速提取估算的方法.快速提取算法的结果将有助于实现渔排调查的准自动化分析,为今后在全国范围内开展养殖用海监测管理工作提供技术支撑.
1 研究区域概况
本研究选取福建沿海古雷和可门港两个重点的海水渔业养殖区作为研究对象(图1).这两个区域采用的主要养殖方式是筏式养殖.筏式养殖是在浅海海区利用旧船、绳索、锚、撅、浮桶、竹竿、玻璃或塑料浮子等器材制成平台式、延绳式各种类型的筏架,进行大型藻类、贝类及其他海产动物的养殖[7].漳州市古雷镇位于漳浦县南端的古雷半岛上,三面临海,辖区包括整个古雷半岛及附近海域、岛礁.古雷镇经济以渔业为主,农业辅之,渔业以海水和滩涂养殖为主,养殖种类有鲍、扇贝、海带、紫菜、羊栖菜等.海域面积148 km2(含浅海滩涂面积55 km2);福州连江可门港区位于连江县东北部,罗源湾南侧,背山面海,是天然深水良港,主要水产养殖品种为鲍、黄花鱼等.

图1 研究区域Fig.1Study area
2 数据源及研究方法介绍
2.1UAV系统平台
本次项目是和福建省测绘院合作,采用TZ-4 UAV平台系统.该UAV最大抗风能力6级,有效荷载5 kg,续航时间2~3 h.该款UAV多应用于中小范围的航摄,例如城镇规划中的土地利用调查、矿产开采监测、应急测绘保障服务.机上搭载的传感器为Canon EOS 5D Mark Ⅱ CCD相机,其感光器件:互补金属氧化物半导体(complementarg metal okide semicon,CMOS)为36.0 mm×24.0 mm,最大像素为2 200万像素,相机的国际标准化委员会(ISO)感光度标准设置范围为ISO 100~6 400.
2.2UAV图像获取
本项目采用的图像为2013年8月26日可门港图像,航摄地面分辨率0.1 m;古雷区域拍摄时间为2013年12月31日,航摄地面分辨率为0.1 m,由于软件读取限制,整个区域无法做到一次进机,所以将图像重采样成0.3 m.获取后的图像处理分2种方式:1) 陆地和近海区域:按照UAV低空数码航空摄影测量外业要求,布设和测量外业像控点,使用Pixelgrid 软件进行空三加密,数字高程模型(digital elevation model,DEM)编辑,生成50 cm×50 cm标准分幅的1∶1 000正射影像图(DOM);2) 远海和海面地物稀少区域:以UAV机载导航定位定向系统数据为主,对大型鱼排角隅点进行外业测量,获取少量外业测量坐标,使用OKMatrix软件生成影像快拼图.
2.3UAV渔排自动提取的物理基础
UAV上CCD相机获取的图像虽然只有红、绿、蓝3个波段,但是和携带多(高)光谱传感器的传统遥感平台一样,在不同通道获取的数据仍然可以反映地物的遥感反射特性.
通过对UAV提取的图像进行分析,选取典型沿海养殖区做散点图(图2(a)),该区域主要包括水体和渔排2种地物类型.发现在红、绿波段二维散点图上,呈现明显的两个高密度区域:一个是W区,对应水体区;另一个A区,对应的是渔排.A区的斜率(slope)要大于W,换而言之,渔排的红波段和绿波段的比值要大于水体,这和我们对Landsat8图像的光谱分析相一致(图2(b)).从光谱曲线可以看出(原始图像经过大气校正后,按照5×5窗口获取的光谱反射率曲线),渔排在中心波长为655 nm的红光波段光谱反射率明显高于大洋和近岸较为清澈的水体,浑浊水体在红光和绿光波段的反射值明显高于其他类型水体.红光波段可以有效地区分渔排和其周边环境信息[8-9].因此利用该种特性进行渔排的计算机提取从理论上来说是可行的.在提取过程中,首先需要排除陆地的干扰信息,以海面信息作为主要的解译对象.

(a)UAV获取图像的红(R)绿(G)波段二维散点图;(b)Landsat8 图像光谱曲线.图2 渔排光谱分析Fig.2Spectrum analysis of marine cages in aquaculture
2.4快速提取算法
UAV渔排快速检测算法主要是针对渔业信息管理的业务化运行需求而提出的.UAV图像地面分辨率很高,可以达到0.1 m甚至更高的分辨率,这也导致了需要处理的数据量非常庞大,一些传统的遥感影像处理方法、计算方法比较复杂,经常会出现由于占用计算机内存过多而导致计算速度极为缓慢的现象,这显然不适合业务化运行.本研究提出一种快速检测算法,该方法采用不同通道间的比值来增强渔排和周边水体等地区的差异性,同时部分地减少了大气的影响.它具有运算量小、人工干预少、计算速度快的特点,比较适合实际业务中的应用.基于UAV图像分析(参考图2(a)),其计算方法如下:
I=Dred/Dgreen,
(1)
其中I为渔排检测指数,Dred为红光波段的数值,Dgreen为绿光波段的数值.
阈值的确定:阈值的选择是基于样本区平均的I值加减2倍的方差来确定的.具体操作过程为:在ENVI 软件的支持下,基于UAV的红、绿、蓝彩色合成影像,目视选择渔排样本区,制成感兴趣区,计算该感兴趣区对应的I平均值及方差值,则阈值的选取位于
(2)

2.5UAV快速提取渔排流程
UAV渔排自动提取流程,如图3所示.首先进行UAV现场作业,获取研究区域UAV影像;然后对图像进行空三加密、DEM编辑等预处理,生成DOM正射影像;接着针对DOM影像的不同波段,进行直方图和波谱分析,获取渔排的光谱特征,建立用于识别的指征因子I.利用人工目视解译选取样本区域,计算样本区I的均值、方差,并按照公式(2)来确定提取渔排的阈值范围;最后对提取结果进一步优化.

图3 快速提取流程Fig.3Fast extraction stream
3 结果与讨论
3.1快速算法提取结果及精度分析

(a)原始图像;(b)快速提取结果;(c)利用5×5 闭合运算处理后结果;(d)、(e)、(f)为对应的全图红色区域的细节图.图4 古雷渔排提取(2013-12-31)Fig.4Marine cages identification in Gulei at Dec 31,2013

(a)原始图像;(b)快速提取结果;(c)利用5×5闭合运算处理后结果;(d)、(e)、(f)为对应的全图红色区域的细节图.图5 可门港渔排提取(2013-08-26)Fig.5Marine cages identification in Kemen Bay at Aug 26,2013
本研究利用快速提取法分别提取可门港和古雷养殖区的渔排图像,结果如图4和5所示.对比原始图像和渔排提取结果,可以看出利用快速提取法提取的结果基本上可以较为准确地对目标物的轮廓进行识别.但是渔排本身的特性,决定了渔排中的水体信息不可避免地划分到近岸水体中去,也就是说,作为一个整体而言,渔排中间的水体信息如果被漏分了,则会影响后期面积的统计,并且进一步影响产量等的估算.因此本研究在处理快速提取算法的结果时对其进行了图像的闭合处理.闭合运算可以在保持目标物大小和形态不变的情况下,填充孔洞和凹陷的区域.经过实验,本次的结构元素选择5×5比较适宜,该操作是在ENVI软件的支持下完成的,采用ENVI图像形态学处理模块中的闭合运算功能(Filter->Convolutions and Morphology->Closing)[10].图4(c)、(f)与图5(c)、(f)为经过闭合操作后的结果.
为了进一步验证快速提取的可行性,采取随机抽样法来对提取结果进行精度分析.由于遥感图像的数据量大,在采样过程中运用了类似分层抽样的方法.样本的选取过程如下:快速分类是按阈值提取,所以分类结果只有2类,即渔排和非渔排.对于UAV的RGB图像,通过人工目视解译,判定了8个属于渔排的样本区和8个非渔排样本区,如图6和7所示.然后对每个区域进行随机抽样,抽取10%的点作为样本参考点.将所有区域的总的渔排样本点和非渔排样本点与分类结果进行验证,生成一个混淆矩阵,基于该混淆矩阵,对分类精度进行评价,评价结果见表1.

红色区域为渔排采样区,绿色为非渔排采样区,(a)、(b)、(c)、(d)为对应区域细节图.图6 古雷区域用于验证的渔排样本点分布(2013-12-31)Fig.6Validation samples distribution of marine cages in Gulei at Dec 31,2013

红色区域为渔排采样区,绿色为非渔排采样区,(a)、(b)为对应区域细节图.图7 可门港区域用于验证的渔排样本点分布(2013-08-26)Fig.7Validation samples distribution of marine cages in Kemen Bay at Aug 26,2013
表1 渔排提取精度分析
Tab.1 Analysis of marine cages accuracy

区域像元数(参考点-分类点)渔排-渔排渔排-非渔排非渔排-渔排非渔排-非渔排总体精度/%κ古雷396018811727663198.90.976可门港1369706964244921586297.40.945
注:κ表示Kappa系数.
从表1可以看出,UAV对古雷渔排提取精度为98.9%,可门港精度为97.4%.个例的精度稍有差别,主要由于拍摄区域的周边环境和拍摄日的天气条件不同引起的.可门港当时水面有微风,波纹反射信息对识别会造成一定的干扰.进一步通过对闭合处理的图像的渔排总像元数进行统计,并乘以其对应的地面分辨率,估算出渔排面积:古雷养殖区面积为2.713 7 km2,可门港面积为0.584 9 km2.
表2 快速提取法和最大似然法的比较
Tab.2 Comparison between fast-detection and maximum likelihood method

方法像元数(参考点-分类点)渔排-渔排渔排-非渔排非渔排-渔排非渔排-非渔排总体精度/%κ运行时间/s快速提取法396018811727663198.90.97625最大似然法393703191987760599.60.990150
3.2与传统的最大似然法比较
从上述分析可以看出,在精度方面,快速提取法足以实现渔排信息的有效提取.由于快速提取法是采用两波段的比值,计算速度明显比其他算法快,比较适合业务上运行.我们在CPU主频为1.6 GHz,双核四线程,内存容量为4 GB的ThinkPad笔记本上对快速提取法和最大似然法在处理速度和精度上作了比较.发现针对古雷整个区域最大似然法渔排提取精度为99.6%,运行时间是150 s;而利用快速提取法精度为98.9%,但时间在25 s左右,是最大似然法运行时间的1/6.
另外,在图像信息提取的过程中,选取代表性样本是很关键的一步,在拍摄时间和拍摄区域不同时,样本的统计信息经常会发生变化,利用最大似然法通常需要针对不同的影像重新定义样本区;而对于快速算法来说,对阈值进行微调一般就可以获得较为满意的结果.这样不仅节省时间,而且不要求操作人员具备丰富的专业经验.
3.3台风灾害模拟案例分析
为了进一步探讨UAV在台风灾害分析中的有效性,本研究初步建立了UAV灾害分析的途径.强台风/风暴潮可能引起渔排的严重损坏,使渔排冲毁或者冲走,通过台风前后渔排的变化可以对损失进行初步分析:灾前建立可能受灾的重点区域的本底图像库,图像库中可以包括UAV影像和其他高分辨率影像;灾后进行应急响应飞行,获取灾后UAV图像;对受灾前后的影像分别进行渔排面积提取然后求差值,减少的面积即为受损渔排面积.但是实际情况却相对复杂,主要原因为台风过后,有些渔排虽然面积没有太大的变化,但是已经扭曲变形,渔排间的链接被撕裂,渔排严重受损,从而养殖的渔产品严重受灾,所以如何有效估算受损面积比较困难.本研究建立了一个基于渔排总面积变化的估算方法,其基本步骤为:1) 计算台风前后渔排总面积变化:ΔS=S1-S2,S1为灾前面积,S2为灾后面积;2) 基于ΔS计算渔排面积损失率R损失=ΔS/S1,该损失率表示由于台风的影响被淹没、冲走的渔排的面积比例;3) 基于样例研究区灾后图像,利用目视解译方法勾画出渔排严重受损的区域并统计其所占比例,即为渔排损毁率R损毁;4) 计算损失率和损毁率的比例R,假设R为一个常量,也就是说认为台风越严重,渔排损失率越大,其损毁的比例也越高,损失率和损毁率的比值基本保持不变,5) 在上述假设基础上,对今后的台风灾害渔排的损毁面积即可通过下面的公式进行推算:S损毁=R(S1-S2),S损毁为损毁面积.当然R是否不变,变化程度有多大,需要后期进行大量的研究进一步验证.
本次台风灾害案例主要是针对2015年8月8日登陆福建省莆田市的苏迪罗台风,该台风具有风力强、雨量大、危害重的特点.台风发生后,于8月10日完成三都澳区域的飞行,三都澳主要的养殖类型为大黄鱼(Pseudosciaenapolyactis)和鲍鱼(Abalone),还有牙鲆鱼(Paralichthysolivaceus),均在该次台风中受灾严重.本研究的灾前图像为2015年7月18日的高分2号影像,融合后的图像分辨率为0.8 m.通过渔排快速检测算法,提取出渔排区域,如图8所示.
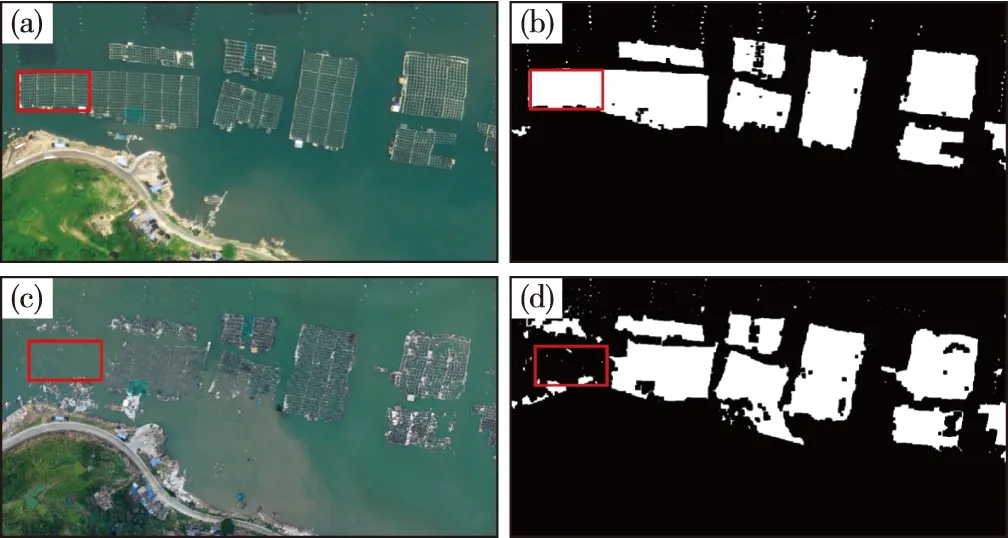
(a)和(b)为2015年7月18日高分2号获取台风灾前影像及渔排提取细节图;(c)和(d)为2015年8月8日UAV获取台风灾后影像及渔排提取细节图.图8 苏迪罗台风渔排受灾前后提取图Fig.8Comparison of marine cages before and after typhoon Soudelor
利用灾害评估算法,计算出渔排面积损失率S损失=9.6%.通过人工目视解译从灾后图像上勾画出严重受损的渔排,然后和总渔排数进行比较,得到渔排损毁率R损毁=28%,推算出当渔排面积减少为9.6%时,渔排严重损毁为28%,也就说损毁率和损失率的比例为2.91,约为3倍的关系.当然目前该方法还是一种非常粗略估算方法,其准确性究竟如何,需要在今后大量的工作中进行验证并进一步修正.
4 结 论
本研究对UAV在海洋信息监测方面的应用进行了初步研究,并利用快速提取法和传统的最大似然法对福建沿海重点区域的渔业养殖区渔排进行了自动提取的尝试,同时对台风灾害进行了初步分析.分析结果表明:
1) 与携带多(高)光谱传感器的传统遥感平台类似,UAV上CCD相机所获取的RGB彩色图也可以反映地物的遥感反射特性,同样可以使用传统的遥感图像分析方法对其进行自动解译.
2) 本文中提出的基于阈值的自动渔排检测算法,运算速度快,适合大批量UAV图像的业务化处理.
3) UAV可以有效用于台风灾害监测,渔排受灾区域信息的提取可以通过灾后UAV图像和灾前本底的对比实现.
然而,渔排快速提取法从本质上还是基于图像的光谱特性进行的分析,是为了满足业务化快速响应的需求提出的一种渔排识别的简单方法.本身具有单纯依赖光谱进行识别的局限性,尤其当光谱波段只有红、绿、蓝3个波段时,会不可避免地出现混分现象.例如有些船体和浪花可能会被误分到渔排中去,在浑浊水区红绿波段比值较大,也会影响提取的精度.未来有必要尝试通过加入纹理特征来提高识别率.
此外,受限于UAV的载重量,目前大多数UAV上搭载的传感器还是以CCD相机为主,但是多(高)光谱成像系统和Mini SAR系统的搭载目前也越来越成为流行趋势.Baluja等[11]利用UAV搭载的6通道的可见光-近红外传感器和热红外仪来评估葡萄园水压状态变化.Zarco等[12]利用260个通道、光谱分辨率为40 cm的高光谱成像仪和热红外仪来反演叶片叶绿素荧光、光化学反射指数和温度,进而评估柑橘园土壤水分胁迫状况.王军峰等[13]利用UAV机载合成孔径雷达对黄河冰情凌汛进行应急监测.事实上多(高)光谱传感器的搭载由于具有波谱覆盖范围广、波段多、波宽窄的特点,所以较CCD能够更有效地捕捉水华、溢油等海洋灾害的光谱特征;Mini SAR 可以不受天气条件的影响,进行全天候的监测,对于台风灾后养殖区受灾分析更加有力.未来可以考虑在UAV上搭载这些多元传感器,这样不仅可以和现场的光谱测量数据作对比,还可以参照现有基于卫星波段建立的水色、透明度等光学模型,进行对比分析,在提高空间分辨率和评估精度的同时大大增加灾害的应急响应能力.
另外需指出的是目前研究提出的灾害评估方法是基于一次台风案例,个案少且基于损失率和损毁率的比值基本保持不变这一假设.该方法需要今后通过大量的案例来进一步验证并进行相应修正.
[1]WATTS A,AMBROSIA V,HINKLEY E.Unmanned aircraft systems in remote sensing and scientific research:classification and considerations of use[J].Remote Sensing,2012,4(6):1671-1692.
[2]申朝永,赵静.无人机遥感在贵州国土资源管理中的应用[J].华东科技:学术版,2013(4):483.
[3]臧克,孙永华,李京,等.微型无人机遥感系统在汶川地震中的应用[J].自然灾害学报,2010,19(3):162-166.
[4]TURNER D,LUCIEER A,JONG S D.Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV)[J].Remote Sensing,2015,7(2):1736-1757.
[5]BENDIG J,BOLTEN A,BARETH G.UAV-based imaging for multi-temporal,very high resolution crop Surface Models to monitor crop growth variability[J].Photogrammetrie-Fernerkundung-Geoinformation,2013,6(6):551-562.
[6]NIETHAMMER U,JAMES M R,ROTHMUND S,et al.UAV-based remote sensing of the Super-Sauze landslide:evaluation and results[J].Engineering Geology,2012,128(11):2-11.
[7]初佳兰,赵冬至,张丰收,等.基于卫星遥感的浮筏养殖监测技术初探——以长海县为例[J].海洋环境科学,2008,27:35-40.
[8]马艳娟,赵冬玲,王瑞梅,等.基于ASTER数据的近海水产养殖区提取方法[J].农业工程学报,2010,26(Z2):120-124.
[9]卢业伟,李强子,杜鑫,等,基于高分辨率影像的近海养殖区的一种自动提取方法[J].遥感技术与应用,2015,30(3):486-493.
[10]HARALICK R M,STERNBERG S R,ZHUANG X.Image analysis using mathematical morphology[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1987,9(4):532-550.
[11]BALUJA J,DIAGO M P,BALDA P.Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV)[J].Irrigation Science,2012,30(6):511-522.
[12]ZARCO-TEJADA P J,GONZALEZ-DUGO V,BERNI J A J.Fluorescence,temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera[J].Remote Sensing of Environment,2012,117(1):322-337.
[13]王军锋,徐成华.UAV机载合成孔径雷达冰情凌汛监测应用研究[J].测绘与空间地理信息,2014(8):46-49.
Monitoring of Inshore Aquaculture Cages Using Unmanned Aerial Vehicle
YAN Jing1,ZHANG Caiyun1,2,ZHANG Yongnian3,LI Xueding4,ZHANG Ning1,JIANG Shan1,SHANG Shaoling1,2*
(1.Key Laboratory of Underwater Acoustic Communication and Marine Information Technology,Ministry of Education,Xiamen University,Xiamen 361005,China;2.State Key Laboratory of Marine Environmental Science, Xiamen University,Xiamen 361102,China;3.Fujian Surveying and Mapping Institute,Fuzhou 350003,China; 4.Fujian Marine Forecasts,Fuzhou 350003,China)
Unmanned aerial vehicle (UAV) may provide a quick means to gather information of inshore aquaculture cages for the government to have an emergency response to events such as typhoons.Based on CCD imageries with 0.1 meter resolution acquired with UAV platform and its spectral features,here we proposed a threshold method to quickly detect the distribution of aquaculture cages in two bays of southern Fujian.An identification accuracy of 98.9% and 97.4%,for Gulei and Kemen bays,respectively,was obtained.Meanwhile,the image processing time is reduced by 5 times,compared to the time needed using the widely accepted conventional approach-maximum likelihood method.In addition,a rough evaluation on the ruin extent of aquaculture cages by typhoon was also attempted,using UAV acquired imageries and satellite images.This study suggests that optical remote sensing with UAV holds promise for better management of inshore aquaculture activities.
unmanned aerial vehicle(UAV);marine cages;fast detection
10.6043/j.issn.0438-0479.201509031农业生产专题
2015-10-08录用日期:2016-02-23
国家科技支撑计划(2013BAB04B01);厦门大学海洋科学基地科研训练及科研能力提高项目(J1210050);厦门大学大学生创新创业训练计划(201510384091)
slshang@xmu.edu.cn
闫静,张彩云,张永年,等.基于无人机遥感技术的港湾养殖区监测[J].厦门大学学报(自然科学版),2016,55(5):742-748.
YAN J,ZHANG C Y,ZHANG Y N,et al.Monitoring of inshore aquaculture cages using unmanned aerial vehicle[J].Journal of Xiamen University(Natural Science),2016,55(5):742-748.(in Chinese)
TP 751.1
A
0438-0479(2016)05-0742-07
猜你喜欢
环球时报(2022-09-07)2022-09-07
海洋与渔业(2022年2期)2022-05-18
海洋通报(2021年2期)2021-07-22
环境监控与预警(2021年3期)2021-06-09
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文小学中年级(2020年6期)2020-07-24
小读者(2020年4期)2020-06-16
同济大学学报(自然科学版)(2019年7期)2019-08-06
小哥白尼(趣味科学)(2018年12期)2018-12-18
自然资源遥感(2014年3期)2014-02-27
