
基于Matlab的三种图像去噪方法的比较研究*
2016-11-30 01:02赛地瓦尔地买买提艾尼瓦尔肉孜
通信技术 2016年7期
赛地瓦尔地·买买提,艾尼瓦尔·肉孜
(喀什大学 物理与电气工程学院,新疆 喀什 844006)
基于Matlab的三种图像去噪方法的比较研究*
赛地瓦尔地·买买提,艾尼瓦尔·肉孜
(喀什大学 物理与电气工程学院,新疆 喀什 844006)
为了研究各种去噪算法的优劣,在介绍图像去噪的基本原理和方法的基础上,采用传统的线性、非线性以及频域的方法,对数字图像进行去噪效果的分析比较和仿真实现。运用Matlab仿真平台的验证结果表明:中值滤波对椒盐噪声的去噪效果很好;维纳滤波对高斯噪声有一定的降噪效果,且较好地保护了图像的边缘细节信息和高频细节信息;三维块匹配(BM3D)方法相对于以上几种方式来说,对图像降噪效果最好,对图像有着明显的平滑效果,且由于充分使用了各模块之间的关系,使得信噪比较高。
图像去噪;中值滤波;维纳滤波;三维块匹配法(BM3D);平均结构相似度
0 引 言
在传播过程中,图像一般都会被各种各样的噪声污染。因为噪声是一个随机变化的信号,所以通常利用概率统计方法来进行分析。图像中的噪声可以看作是图像的颜色及亮度信息在传输过程中随机变化的结果,通常是电子噪声的一个方面。此外,图像的捕捉也会引入许多杂散的外部信息,从而增加图像受噪声污染的程度。所以,为使图像在后续处理时的准确度和清晰度能达到一个好的效果,必须在处理即图像分割、特征提取、边缘检测、模式识别等之前,对现有的图像进行去噪[1]。它不仅是一切图像处理的前提,也是图像处理中极为重要的步骤,极具意义。
1 中值滤波及仿真分析
中值滤波是一种非线性滤波方式。该方式的优点是不需要利用图像的统计特性,因此较为简便。该滤波的主要思维是,在一个领域中,使用一个像素点临近邻域内的所有像素值的中值,代替这个像素点的像素值[2-3]。
一个一维序列f1,…,fn,取窗口长度为奇数m,从该序列中相继抽出m个数,依次排列为fi-v,…,fi-1,…,f1,…fi+1,…,fi+v,其中i为所用窗口序列的中心位置。然后,再将上述序列按照数值从小到大的顺序进行排列。最后,在排好大小的序列中取出中心的数,即:

例如,对于一个序列{1,5,9,2,7},通过中值滤波器重新排列后得到的新序列为:{1,2,5,7,9},中间值为5。
基于上述的中值滤波方法,选取如图1所示的图像作为实验的原始图像,并依次给图像加入均值为0,方差为0.03的高斯噪声和噪声密度为0.03的椒盐噪声,相关的仿真结果分别如图1~图8所示。

图1 原始图像(313×330)

图2 含椒盐噪声图像(SSIM=0.73)

图3 中值滤波降噪(SSIM=0.98)
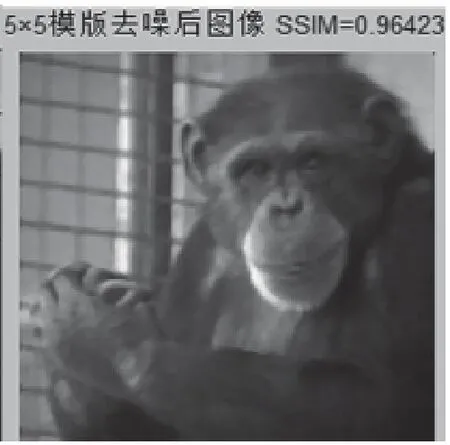
图4 中值滤波降噪(SSIM=0.96)

图5 原始图像(313×330)
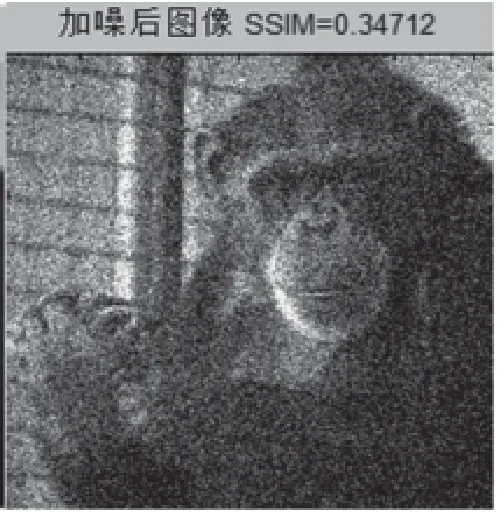
图6 含高斯噪声图像(SSIM=0.34)
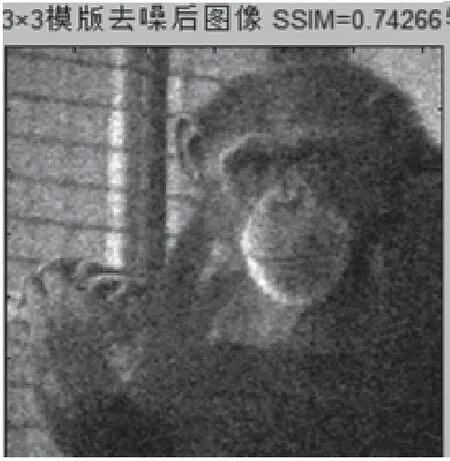
图7 中值滤波降噪(SSIM=0.74)

图8 中值滤波降噪(SSIM=0.87)
由上述仿真结果可知,被椒盐噪声污染的图像(见图2)经过中值滤波后,图像中的噪声几乎全部被滤除(见图3、图4),但对高斯噪声几乎没有效果(见图7、图8);平均结构相似度SSIM的变化越大,表明降噪效果越好,如图3、图4所示;中值滤波的去噪效果与采用窗口成正比(对高斯噪声来说)。窗口尺寸越大,图像降噪效果越好,但代价是图像的模糊程度越大,如图7、图8所示。
2 维纳经验滤波及仿真分析
使用维纳滤波方法的目的是得到信号以及噪声的谱密度信息,以及能够通过一个线性时不变系统使输出信号与原始信号尽量相似[4-5]。假设原始信号以及噪声信号是加性关系,则令s(t)是原始信号,
n(t)是噪声信号,Ŝ( t)作为输出信号,g(t)作为滤波器的系统函数,则四者的关系可以描述如下:

令误差函数为:

式中,α是滤波器的延迟。
由式(2)可以推出:

式中,x(t)=s(t)+n(t),Rs是s(t)的自相关函数,Rxs是x(t)与s(t)的互相关函数。如果x(t)与s(t)不相关,则有Rs=Rxs且Rx=Rs+Rn。
滤波器的目的是使E(e2)得到最小值,故应先求得E(e2)的一阶增量:

要想取得最小值,只要使


式(5)即为维纳滤波器的基本理论等式。
离散序列的有限冲击响应维纳滤波器,其框图如图9所示。
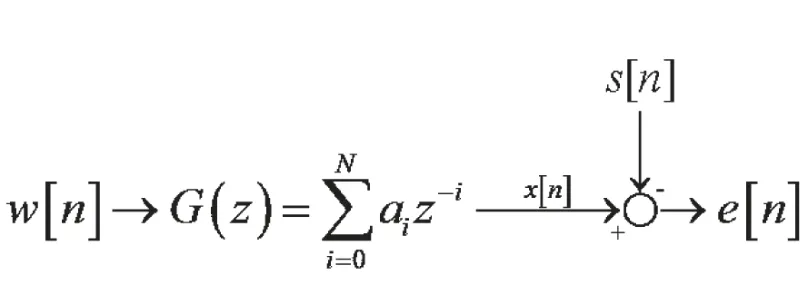
图9 维纳滤波器
对于这个FIR维纳滤波器,可以得到x[n]的表达式为:

根据框图,又可以定义出e[n]=x[n]-s[n]。由于滤波器的目的是使E(e2)得到最小值,所以有:

由e[n]=x[n]-s[n]可以得出:
为了得出向量[a0,…,aN],必然使E{e2[n]}取得最小值,即:
式中,i=0,…N。
假定s[n]与w[n]是不变化的,则由自相关函数Rw[m]与互相关函数Rws[m]的定义出发,可以将式(10)改写为:
式中,i=0,…N。
为取得最小值,令:

将式(12)写成矩阵形式,可以得到:

这个矩阵又被称为维纳-霍夫等式。
基于上述的维纳滤波方法,选取如图10所示的图像作为实验的原始图像,并依次给图像加入均值为0,方差为0.03的高斯噪声和噪声密度为0.03的椒盐噪声,相关的仿真结果分别如图11~图15所示。
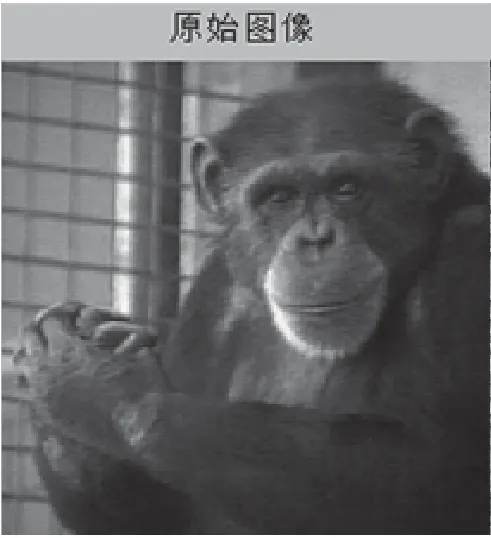
图10 原始图像(313×330)

图11 含高斯噪声(SSIM=0.35)
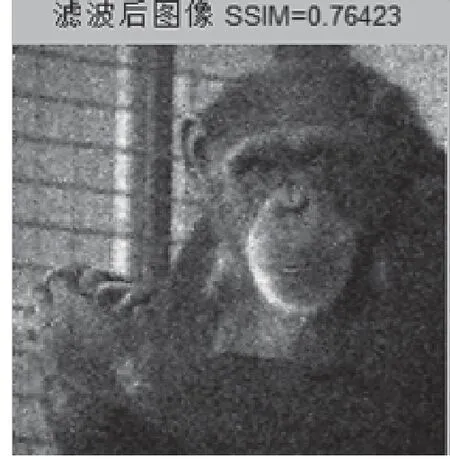
图12 维纳滤波降噪结果(SSIM=0.76)

图13 原始图像 (313×330)
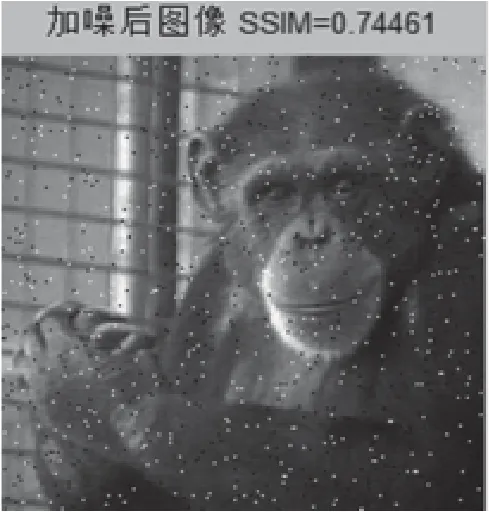
图14 含椒盐噪声(SSIM=0.75)
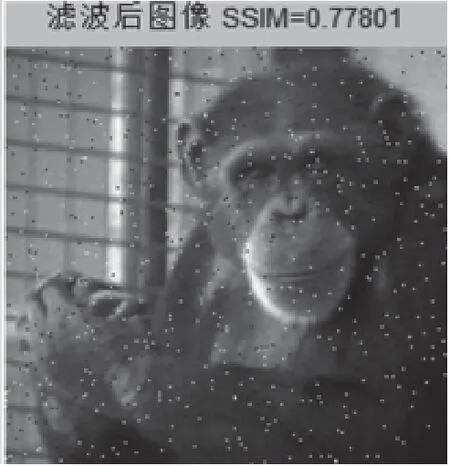
图15 维纳滤波降噪结果(SSIM=0.79)
由图11、图12对比可知,维纳滤波对高斯噪声有一定的降噪效果,且较好地保护了图像的边缘细节信息和高频细节信息。相比实验前后的SSIM值可以看出(见图14、图15),维纳滤波器对椒盐噪声几乎没有降噪效果。
3 BM3D及仿真分析
三维块匹配方法是一种常用的非局部估计方法。在这个算法中,图像像素点值通过一个与以该像素点为中心的区域相似的另外一个区域来进行估计。主要步骤:首次,将目标图像分成一定大小的小块图片;其次,按照图像块之间的相似性,把互相相似的二维图像块合并成一个三维数组;再次,使用联合滤波方法对这些三维数组进行处理;最后,对这些三维数组进行逆变换,返回到原始图像,从而得到降噪后图像。该方法的降噪效果较好,不仅可以得到一个理想的较高信噪比,而且视觉效果也很不错[6-7]。
3.1 基于小波收缩变换的初步三维块匹配算法
对基于小波收缩变换的三维块匹配算法理论作简单推导。
首先,仍然给出与上文形式一样的带噪图像模型:z(x)=y(x)+η(x)。这里说明,噪声η(x)为方差σ2的高斯噪声,即η(x)~N(0,σ2)。定义Zx为从图像z中选取的大小为N1×N1的板块,yˆ为最终得到的处理后的图像。为了能够给后续工程提供模版,将当前正在处理的板块称作ZxR,即为一个参考模块。
块匹配方法是要寻找到一个与参考模块ZxR极为相似的模块。因为这种寻找方式的精确度受噪声影响,因此这里将利用板块相似的手段,从而在二维变换域中进行粗糙降噪。
定义板块距离(与相似度成反比例):

式中,x1,x2∈X,Γ2D是一个二维的线性变换方法(如DCT、DFT等),Υ是硬阈值处理方法,λthr2D指固定的阈值参数,‖·‖2指平方模。通常情况下,Υ定义为:

块匹配的结果是一个集合SxR,集合中的板块坐标由式(15)可以与相似。因此,定义SxR:

式中,τmatch是两块板块能够被认为相似的最大距离。
对于已经得到相似板块的集合SxR,将其与原来的板块堆积成一个形式为N1×N1×|SxR|的三维数组,然后对使用三维联合变换Γ3D,以得到无噪声信号的稀疏表示。随后,再用逆变换重建估计:

式中,λthr3D是固定阈值参数。数组包含了以及图像板块的正确的估计板块
定义这些局部估计量的权重为:

式中,Nhar是经过硬阈值后非零变换系数的个数。
观察可以得出,σ2Nhar的值与的方差值相等。因此,的稀疏分解可以得到噪声最小的估计图像。
3.2 BM3D滤波器最终估计法
可以构建一个维纳经验滤波器作为上述阈值算法的最终估计法。令Ex为x上的一个大小为N1×N1的板块。为了提高块匹配方式的准确性,用两个板块间相减的方式替代上一小节式(17)来定义SxR:

接下来,使用线性维纳滤波器来代替硬阈值算法。作为三维变换域的算法,维纳滤波器的衰减系数为:

通过衰减系数给出的图像估计为:

最后,对于有重叠的板块,通过加权求和取平均的方式得到真实的图像估计。其中,加权系数ωxR为:

3.3 BM3D算法法则总结
令将要处理的带噪声的图像大小为M×N,即|X|=MN。利用两个同等大小的缓冲区:ebuff(估计值缓冲区)以及wbuff(权重值缓冲区)来表示算式中的分子和分母。ebuff(x)表示坐标x处的像素值,而ebuffx则表示x处的一个板块。
于是,BM3D算法可以大致分为如下几步:
(1)初始化:对于所有的x∈X,令ebuff(x)=0且wbuff(x)=0。
(2)局部硬阈值估计:
对于每个xR:
①块匹配:由式(16)计算SxR的值,并限制搜索范围为以xR为中心的Ns×Ns的区域。如果|SxR|>N2(N2为SxR内所允许的最大板块个数),那么保留距离值较小的板块,其他的则舍弃。
得出估计缓冲区的值:

相应地,有:

(4)局部维纳估计:将上述的e(x)作为初始估计量,并重置ebuff(x)=0、wbuff(x)=0。
对于每个xR:
①块匹配:由式(19)计算SxR的值,并限制搜索范围为以xR为中心的Ns×Ns的区域。如果|SxR|>N2(N2为SxR内所允许的最大模块个数),那么保留与ExR距离值较小的板块,其他的则舍弃。

相应的,wbuff( x)=wbuff( x)+W( xR)。
仿真结果及结论,如图16~图18所示。
由仿真结果可知,峰值信号信噪比PSNR越大,表明降噪效果越好(对比图16和图18所得)。
图16 原始图像

图17 含高斯噪声(PSNR=19.45,σ=30)

图18 BM3D降噪结果 (PSNR=30.64,σ=30)
综上,BM3D方法相对于以上几种方式来说,是图像降噪效果最好的方法。它使用块匹配的方式对图像平滑效果明显,且由于充分使用了各个模块间的关系,使得信噪比较高。总的来说,BM3D图像降噪方法是一种较为优秀的图像降噪方法。
4 结 语
基于图像去噪的基本原理和方法,运用Matlab仿真平台,对数字图像进行去噪效果的分析比较和仿真实现。仿真结果表明:中值滤波对图像的椒盐噪声非常有效,但对高斯噪声几乎没有效果;维纳滤波对高斯噪声有一定的降噪效果,且较好地保护了图像的边缘细节信息和高频细节信息;BM3D方法相对于以上几种方式来说,噪声图像的峰值信号的信噪比PSNR相比去噪后图像的峰值信号的信噪比PSNR明显变高,是图像降噪效果最好的方法。同时,它使用块匹配的方式对平滑效果明显,且由于充分使用了各个模块间的关系,使得信噪比较高。总的来说,BM3D图像降噪方法是一种较为优秀的图像降噪方法。
[1] 冈萨雷斯.数字图像处理[M].第2版.北京:电子工业出版社,2003. Gonzales.Digital Image Processing[M].Second Edition.Beijing:Publishing House of Electronics Industry,2003.
[2] Hwang H,Haddad R.A.Adaptive Median Filters:New Algorithms and Results[J].IEEE Transactions on Image Processing,1995,4(04):499-502.
[3] 杨卓东,张欣,张涛等.改进自适应中值滤波的图像去噪[J].通信技术,2015,48(11):1257-1260. YANG Zhuo-dong,ZHANG Xin,ZHANG Tao,et al.An Improved Adaptive Median Filter for Image Denoising[J]. Communication Technology,2015,48(11):1257-1260.
[4] Wiener N.Extrapolation,Interpolation,and Smoothing of Stationary Time Series[M].New York:Technology Press of the Massachusetts Institute,1949.
[5] Portilla J,Strela V,Wainwright M,Simoncelli EP.Image Denoising Using Scale Mixtures of Gaussians in the Wavelet Domain[J].IEEE Transactions on Image Process ing,2003,12(11):1338-1351.
[6] Zhou D,Cheng W.Image Denoising With An Optimal Threshold and Neighboring Window[J].Pattern Recognition Letters,2008,29(11):1694-1697.
[7] Malfait M,Roose D.Wavelet-based Image Denoising Using A Markov Random Field A Priori Model[J].IEEE Transactions on Image Processing,1997,6(04):549-565.

赛地瓦尔地·买买提(1985—),男,硕士,助教,主要研究方向为信号与信息处理、图像处理;
艾尼瓦尔·肉孜(1960—),男,本科,教授,硕士生导师,主要研究方向为信号中的噪声效应研究。
Comparison of Three Image De-Noising Methods based on Matlab
SAIDIWAERDI·Maimaiti, AINIWAER·Ruozi
(College of Physics and Electrical Engineering, Ka Shi University, Kashi Xinjiang 844006,China)
In order to evaluate the quality of de-noising algorithms, the principles and methods for eliminating image noise are described.Traditional methods such as inlinear,nonlinear and frequency domains, are used to eliminate image noise, and their results eliminating image are analyzed and compared. Simulation with Matlab indicates that the median filtering is very good in denoising of salt and pepper noise, and Wiener filtering fairly good in denoising of Gaussian noise and better protection of Edge details and high-frequency details for image. Three-dimensional block matching (BM3D)method, as compared with the above methods, is much better for image noise reduction, has more Significant smoothing effect on the image and for its full use of the relationship of between various modules, even higher SNR for noisy image.
image denosing; median filtering; wiener filtering; BM3D;SSIM
National Natural Science Foundation of China(No.21363010)
TP308
A
1002-0802(2016)-07-0856-06
10.3969/j.issn.1002-0802.2016.07.012
2016-03-23;
2016-06-20 Received date:2016-03-23;Revised date:2016-06-20
国家自然科学基金(No.21363010)
猜你喜欢
少年文艺·开心阅读作文(2020年4期)2020-03-28
小天使·二年级语数英综合(2019年4期)2019-10-06
舰船电子对抗(2019年4期)2019-09-10
太原科技大学学报(2019年3期)2019-08-05
小学生学习指导(低年级)(2019年6期)2019-07-22
哈尔滨理工大学学报(2018年6期)2018-02-13
计算机应用与软件(2017年3期)2017-04-14
电影故事(2015年16期)2015-07-14
饮食科学(2014年5期)2014-06-18
英语学习·阳光英语(2013年2期)2013-07-04
