
一种改进的基于车载锂电池数据的SoC估算方法
2016-12-06 10:54陈超张志刚
电气自动化 2016年3期
陈超, 张志刚
(上海交通大学 电子信息与电气工程学院,上海 201100)
一种改进的基于车载锂电池数据的SoC估算方法
陈超, 张志刚
(上海交通大学 电子信息与电气工程学院,上海 201100)
针对车载锂离子电池的SoC(State of Charge)估算,面临两个主要问题:电池充放电过程中的极化效应,SoC与OCV(Open Circuit Voltage)关系曲线受电池内阻等因素影响,精度较低。从自主设计的锂电池等效电路模型入手,改进现有的Thevenin模型,用一个新的极化模型来代替传统的RC模块克服锂离子电池的极化效应,增加模型的精度。利用改进后的模型,基于Dual-EKF(dual-Extended Kalman Filter)估计方法,克服传统方法中无法消除电池内阻误差的缺点。对照实验结果表明,在保证较低计算复杂度的情况下,使估算误差保证在6%以内。
SoC估算;Thevenin模型;双卡尔曼滤波;极化效应;车载锂电池
定稿日期: 2015-12-21
0 引 言
近年来,随着新能源汽车的迅猛发展,电动汽车,油电混动汽车凭借其高效率,低排放的特点,越来越成为世界范围内关注的焦点。而锂离子电池系统凭借其相对较高的循环耐用性以及高能量密度的特点,成为目前最有前途的能量存储解决方案。作为锂离子电池系统的重要组成部分,电池SoC的估计精度对于电动车高效性,用户体验舒适性,以及锂电池安全性方面都有着重要意义。
目前对于SoC的估算方法,主要可分为三大类:直接测量法,基于模型的估算方法,基于数据驱动的估算方法。直接测量法主要包括内阻法[1],安时积分法[2]。此种方法的精确度对于传感器要求很高,往往需要精密仪器测量,成本较高,难于普及,在实车上并不适用。基于模型的估算方法包括:电化学模型[3],热耦合模型[4],Thevenin等效电路模型等。电化学模型涉及复杂的电化学模型,计算量太大,无法满足车载SoC估算的实时要求。而Thevenin模型计算量虽小,但是精度不高。基于数据驱动的估算方法,支持向量机[5],径向基神经网络[6],主要指机器学习类方法,通过对现有电池数据的学习,对电池动态特性进行仿真。这类方法对于数据质量和数量都要求很高,在电动汽车发展的起步阶段,数据要求显然达不到,而且计算量要求很高,实时反馈难以实现。本文采用基于模型的估算方法,对Thevenin模型进行改进后,结合Dual-EKF法满足了精度与复杂度的双重要求。
1 电池模型的建立
1.1 传统Thevenin模型

图1 Thevenin等效电路模型
传统一阶Thevenin模型如图1所示,VOCV为开路电压,Ri为欧姆内阻,Rp为极化内阻,Cp为极化电容,Vp为极化电压,V为负载端电压,RC模块用来反映电池极化效应。该模型结构简单,能反映出特定频域上的电池的动态特性,且各种参数具有一定物理意义,可解释性强,在相对可以接受的精确度下,能够大幅加快响应速度,因而能够广泛应用于各种电池研究实验中。该等效电路的状态方程组如等式(1)所示。
(1)
极化效应作为电源中很重要的电化学效应,它的作用情况决定于电池所处的状态,即:充电状态,放电状态和暂态。目前对于电池极化效应还没有清楚的物理学解释。但是从电化学的角度,极化效应可以归纳为电极内不同区域在充放电过程中平衡电位不同所引起的扩散现象,这种现象会使电池内部阻抗发生变化,从而影响电池真实OCV的计算。然而,Thevenin等效模型所表征的极化效应过于简单,难以准确表征计划效应的复杂情况。
1.2 改进Thevenin模型

图2 改进后的等效电路模型
为了消除极化效应,同时降低电化学模型带来的计算复杂度。本文提出图2所示等效电路模型,其中Vh(k)为极化电压,其一阶模型如等式(2)所示,γ为一个权重系数,Umax为极化电压的最大值,其值为实验测得的充电OCV与放电OCV最大差值的一半,经实验测得为0.041 3,I(k)为当前电流值,Vh(k-1)为前一时刻之后电压值。
Vh(k)=e-γ·|I(k)|·Vh(k-1)+
(1-e-γ·|I(k)|)·sgn(I(k))·Umax
(2)
由上式(2)可知,Vh值取决于当前负载电流值大小,前一时刻Vh值以及当前所出的过程,处于-Umax和Umax之间,可以看出充电时初始值Vh(1)=Umax,放电时初始值,Vh(1)=-Umax。
同时,原有RC模块受物理意义限制,其元件参数,如电阻与电容值均只能为正。而且该模型中时间常数Rp*Cp为非线性参数,优化难度较高,这毫无疑问会对仿真结果,与计算复杂度有所限制,因而构建一个极化模型,代替原有的RC模块,该模型如等式(3)所示。
Vr(k)=α1·Vr(k-1)+α2·Vr(k-2)+β1·
I(k-1)+β2·I(k-2)+e(t)
(3)
其中Vr为模块端电压,e(t)为均值为0的高斯白噪声,线性参数αi与βi尽管没有任何物理意义,却能够更方便地表征RC电池模型地动态特性,显著降低调参复杂度。从计算量的角度,我们取前2个时刻前的极化模型电压值与电流值,作为预测当前时刻极化模型电压值的特征参数。
由图2所示的模型可得等式(4),如下所示,将等式(2),(3)代入等式(4)中,分别替代Vr(k)与Vh(k),得到等式(5),由此可知需要优化的参数为[α1,α2,β1,β2,γ]这五个参数,由于极化模型为线性模型,可以看出除了γ需要经过变换外,其余的参数采用线性最小二乘法直接优化即可,参数优化结果如表1所示。

V(k)=VOCV(k)-I(k)·Ri-Vh(k)-Vr(k) (4)
2 锂电池SoC估算方法
2.1 安时计量法
根据SoC的定义,得出SoC的计算表达式如下:
其中SoC0为SoC初始值,η为电池充放电效率,通常取0.75,C为电池的额定容量,I(t)为随时间变化的电流。对上述等式做离散化处理后得到等式(6):
(6)
本文所使用的SoC的估算方法是基于开路电压法的最优估算方法,卡尔曼滤波法。其优点在于,将SoC作为卡尔曼滤波的一个状态空间变量,在估算电池SoC的同时,用观测的电压值来修正安时法算得的SoC值。当初始SoC0误差较大或者长时间的累积误差较大时,卡尔曼滤波增益矩阵K的权值也较大,对SoC的修正作用就强; 当误差较小时,K的权值就小,对SoC的修正作用也就弱。这种方法克服了安时法自身固有的问题,同时也有效滤除噪声的影响。
2.2 EKF算法
卡尔曼滤波算法适用于估算线性时变模型,对于非线性模型需要用EKF(Extended Kalman Filter)算法估算,其性能主要取决于状态空间模型的精度。其基本算法流程为:
1) 确定状态方程和输出方程:

其中w(k)和v(k)为独立高斯噪声,由w(k)和v(k)可得:
对f(x,u)),g(x,u)求一阶导数,可得A(k),C(k):
2) 初始化


3) 时间更新

4) 观测更新
增益系数:
K=Σp(k+1)·CT(k+1)·
(C(k+1)·Σp(k+1)·CT(k+1)+R(k))-1

预测协方差修正:Σ(k+1)=(1-K·C(k+1))·Σp(k+1)
根据电池模型的电路方程和SoC的定义,可以得出电池模型的离散空间状态方程和输出方程如下等式(7)所示,按照EKF流程,即可不断更新修正状态矩阵,得到预测SoC值。
I(k)+wk
V(k)=VOCV(k)-I(k)·Ri-V(k)-Vh(k)+vk
(7)
2.3 Dual-EKF法
通过EKF算法,可以对车载锂电池SoC进行估算,然而由于未考虑电池欧姆内阻Ri的变化。随着SoC和温度的变化,电池欧姆内阻往往也会产生相应波动,使SoC估算形成误差。本文采用双卡同时在线估计电池状态和参数,使电池模型能较好的描述电池的动态特性,具有了较好的适应性,使得SoC的估算精度得以提高。双卡尔曼滤波器总体思想是交替使用模型参数来估计系统状态和使用系统状态来重新估计模型参数。利用两个独立的卡尔曼滤波器,分别估计系统状态和参数。
将电池欧姆内阻作为参数向量,并且认为它是缓慢变化的,可以得到如下离散状态空间系统方程和输出方程:
其中rk,vk为高斯白噪声,接下来,将内阻EKF模型与电池EKF模型相结合即可。
3 实验验证
3.1 实验设计
为验证锂电池SoC-OCV动态特性,本实验取一节锂电池作为实验对象。通过HPPC混合脉冲功率特性实验测定电池动态特性,实验温度为25 °C。如图3所示,电池首先在恒流模式下充满到100%,电压稳定在3.7 V时,即认定电池充满。静置一小时后,开始恒流放电至电压降至截止电压2.8 V时,认定放电完成。每放电5%,即暂停一小时,取稳定电压为当前SoC下的OCV值。

图3 HPPC实验放电电压电流曲线
插值法拟合后的SoC-OCV曲线如图4所示。
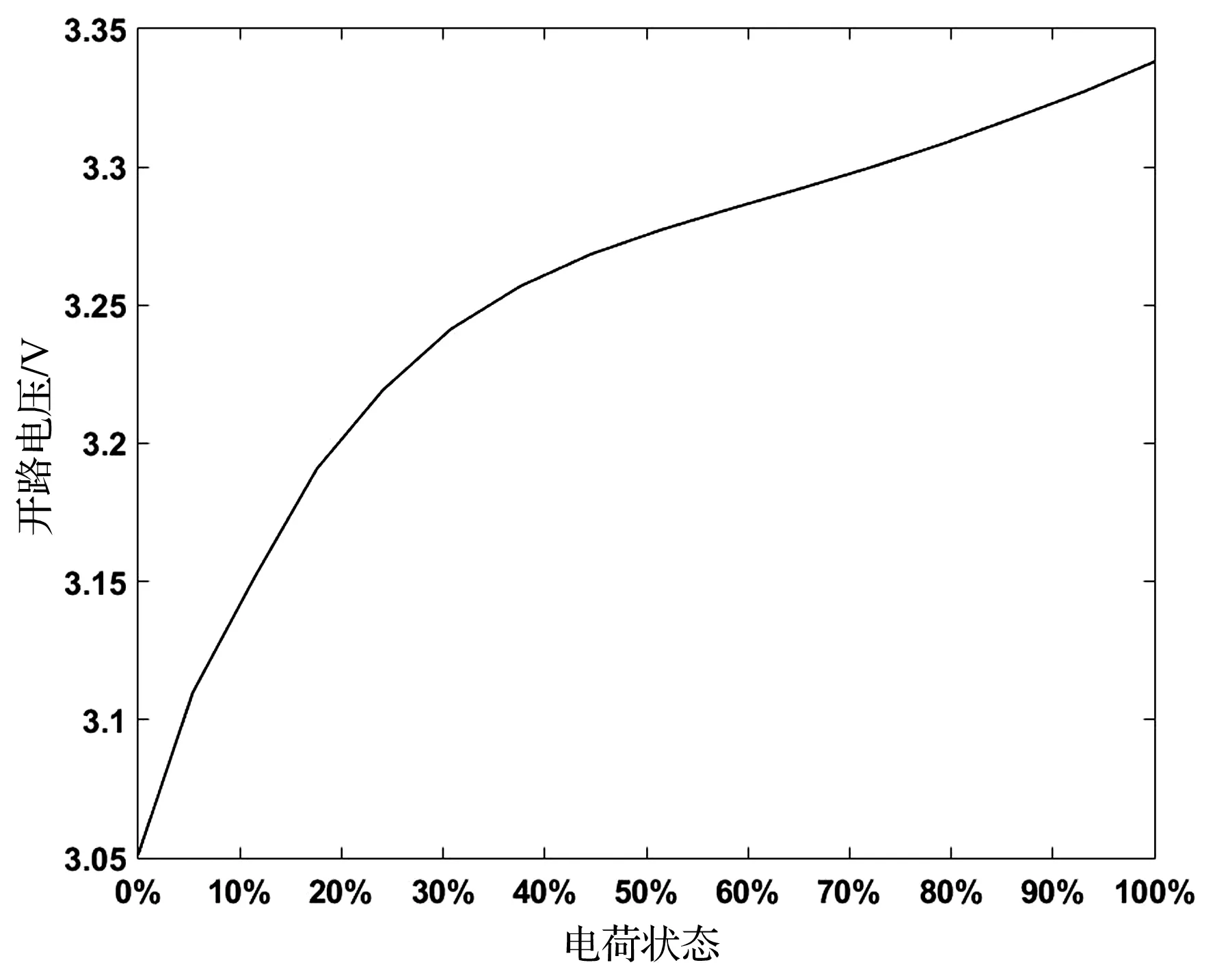
图4 SoC-OCV关系曲线
实验采用了一辆力帆电动汽车,使其在绕校园外圈路线上行驶。从满电荷量行驶至无法行驶,认为SoC为0,经过车载CANBus,对实车采集到的电池数据,采用基于改进Thevenin模型的EKF算法,进行SoC估算。对采集到的99节额定电压为3.2 V的电池数据进行处理,将其按电压大小排序,取其中电压最低的一节电池作为整个电池组的实验数据,其具体电流曲线如图5所示。
3.2 实验结果
将采集得的电动车行驶中电池数据,运用改进的Thevenin模型中,代入如公式(6),(7)所示状态方程组中,运用Dual-EKF法,估算实时SoC值。
如图6-7所示为SoC估计曲线与实际计算值的对比,实线为安时计量法所得,而虚线为dual-EKF算法所得,两种模型具体估算误差如表2所示。

表2 两种模型误差详细对比

图6 Thevenin模型SoC预测结果曲线
4 结束语
由实验结果可知,经过改进Thevenin模型后的Dual-EKF算法能够比较准确的估算电动汽车实时SoC,能有效克服其电化学阻抗带来的极化效应,可以进一步见效SoC估算的误差,将平均误差大小控制在3%以内,最大误差控制在6%以内。

图7 改进后模型SoC预测结果曲线
[1] 何志超, 杨耕, 卢兰光,等. 基于恒流外特性和SoC的电池直流内阻测试方法[J]. 清华大学学报:自然科学版, 2015,101(5):532-537.
[2] 鲍慧, 于洋. 基于安时积分法的电池SoC估算误差校正[J]. 计算机仿真, 2013,30(11):148-151.
[3] DOMENICO D D, FIENGO G, STEFANOPOULOU A. Lithium-Ion battery state of charge estimation with a Kalman filter based on a electrochemical model[C]// Control Applications, 2008. CCA 2008. IEEE International Conference on 2008:702-707.
[4] 徐蒙. 磷酸铁锂动力电池放电过程电化学—热耦合模型研究[D]. 北京:北京交通大学, 2014.
[5] 于洋, 纪世忠, 魏克新. 基于LS-SVM算法动力电池SoC估计方法的研究[J]. 电源技术, 2012,35(3):349-351.
[6] 雷肖, 陈清泉, 刘开培,等. 电动车电池SoC估计的径向基函数神经网络方法[J]. 电工技术学报, 2008,23(5):81-87.
你帮,我帮,大家帮;同一首歌,大家唱。
节省一分钱,献出一份爱心,温暖世间真情。
种下一棵树,收获一片绿荫;
献出一份爱心,托起一份希望。
用心点燃希望,用爱撒播人间。
涓滴之水成海洋,颗颗爱心变希望。
An improved SoC Estimation Method Based on the Data about Vehicle-mounted Lithium Battery
Chen Chao, Zhang Zhigang
(College of Electronic Information and Electrical Engineering,Shanghai Jiao Tong University,Shanghai 201100, China)
SoC (state of charge) estimation of vehicle-mounted lithium ion battery has a relatively low accuracy due to two factors: polarization effect in the process of battery charging/discharging, and affection of internal resistance of the battery upon SoC-OCV (open circuit voltage) relation curve. Starting from a self-designed equivalent circuit model of the lithium battery, we improve the existing Thevenin model by using a new polarization model in place of the traditional RC module to overcome the polarization effect of the lithium ion battery and increase the accuracy of the model. With help of the improved model, we use dual-EKF (dual-extended Kalman filter) estimation approach to overcome the traditional method’s shortcoming of being unable to eliminate the error of the internal resistance of the battery. Experimental results show that in the case of low computational complexity, estimation error can be maintained below 6%.
SoC estimation; Thevenin model; dual-Kalman filter; polarization effect; vehicle-mounted lithium battery
10.3969/j.issn.1000-3886.2016.03.010
TM921.1
A
1000-3886(2016)03-0028-04
陈超(1991-),男,江苏人,硕士,专业:电气工程。 张志刚(1971-),男,甘肃人,副教授,专业:电气工程。
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
物理之友(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
数学小灵通(1-2年级)(2020年9期)2020-10-27
TMR Modern Herbal Medicine(2019年4期)2019-11-01
航天电子对抗(2019年4期)2019-06-02
新高考·高一数学(2018年5期)2018-11-22
中学物理·高中(2016年12期)2017-04-22
中学物理·高中(2016年2期)2016-05-26
