
飞机驾驶舱脚蹬位置研究
2016-12-07 06:45吕建清
广东科技 2016年13期
文/吕建清
飞机驾驶舱脚蹬位置研究
文/吕建清
脚蹬操纵系统是飞机驾驶舱中的主要操纵部件,是驾驶舱设计中的重要参考。脚蹬的功能是进行空中的航向操纵和地面的转向及刹车。脚蹬的前后、上下极限位置的范围是在飞行员的眼位参考点和座椅参考点等驾驶舱设计基准的中立位置明确后,再综合确定的。这时可利用不同百分位飞行员的足底运动范围来确定脚蹬踏板的初始位置和行程。本文根据人机工程学原理,参考飞行员坐在座椅上,下肢操作脚蹬踏板的舒适性角度范围,结合《中国男性飞行员人体尺寸》(GJB4856-2003)中的人体数据进行计算,得出适合中国飞行员的脚蹬踏板的行程范围和初始位置,为驾驶舱中脚蹬踏板位置确定提供定量的数据支持。
1 脚蹬人机工程的设计原理
针对人体下肢位置关系推荐的一些参考角度值见表1所示。

表1 人体舒适角度范围(单位°)
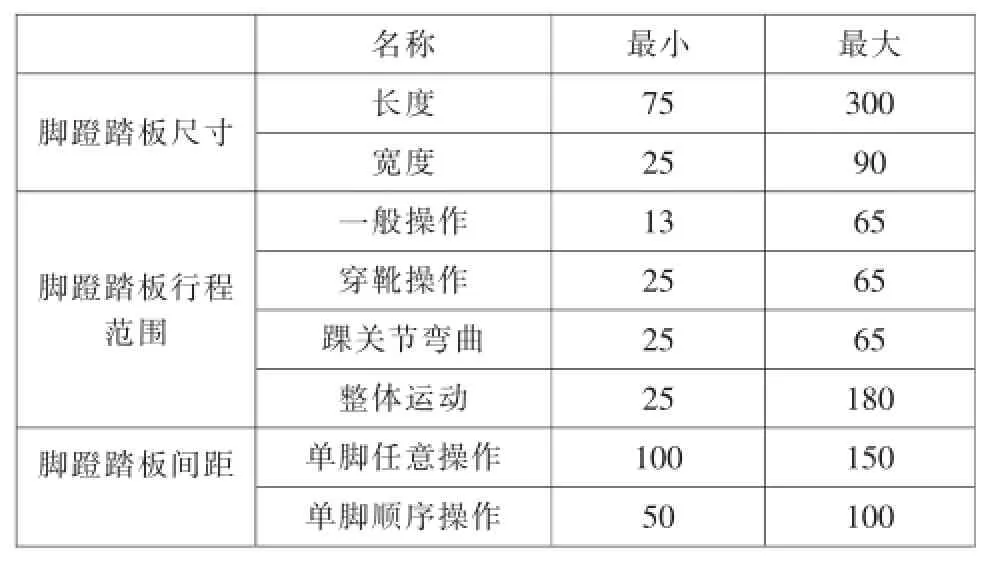
表2 脚蹬设计参数推荐值(单位mm)
脚蹬踏板的外形尺寸,主要取决于脚蹬运动扫掠的空间和踏板间距,但必须保证脚与脚蹬踏板之间有足够的接触面积,满足脚蹬踏板的可靠操控,脚蹬踏板的操纵运动范围不应该超过舒适操控的范围。脚蹬踏板运动的前后距离不足,方向操纵会过于灵敏,造成飞机姿态变化过快;脚蹬踏板运动的前后距离过大,方向操纵会过于迟钝。表2为推荐的踏板设计参数。
2 基于人机工程学的脚蹬区域计算
飞行员执行飞行任务时,双脚置于脚蹬踏板上,手还需要操作驾驶盘或驾驶杆和油门杆等操作器件,同时还要观察机外情况和驾驶舱内数据显示,这样的人机关系决定了飞行员的驾驶姿势。考虑飞行员操作脚蹬踏板的方便舒适,且不能影响其它操纵器件的操作和飞行员视野及对仪表的认读,同时要兼顾身材高大者和身材矮小者,用作图的方法来表示人体的各种驾驶姿势和计算脚蹬的位置工作量非常大。为方便确定脚蹬踏板位置,美国汽车工程协会(SAE)推荐使用二维人体模型来确定位置。
在初步研究飞行员的姿势后,可以将飞行员人体数模简化成由多个连杆和关节连接成简化人体模型,运动关节用相应连杆之间的连接点表示,该模型默认关节的转动中心不会偏移。为了飞行员能在驾驶时保持一定的舒适工作状态,缓解工作的疲劳,基于人机工程原理,研究人员统计出驾驶时用到的姿势的舒适角度范围,如表1所表示。根据《中国男性飞行员人体尺寸》可整理出本文计算时使用的第5百分位、第50百分位和第95百分位男性飞行员的身体数据,如表3所示。
将CATIA人体模型进行处理,如图1所示。
本文研究的内容是在飞行员舒适姿态下的足底转轴与足底交点位置(A点)的运动区域。首先假定飞行员左右髋关节之间中点作为坐标原点(0,0,0)。计算公式如下:

表3 中国男性飞行员人体尺寸(单位mm)

图1 人体模型示意图
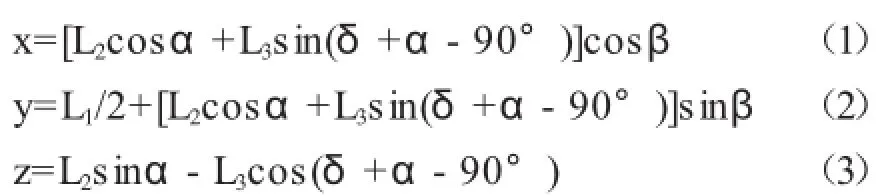
从公式中可知,足底转轴与足底交点位置运动区域的确定取决于α角、β角和δ角,这三个角度的变化以及不同百分位飞行员人体尺寸数据。通过人体关节角度的随机组合计算,即可确定舒适姿势下的脚蹬运动扫掠包络范围。结合座椅参考点的中立位置和前后极限位置,使用《中国男性飞行员人体尺寸》中第5百分位和第95百分位的人体数据,就可以分别确定出脚蹬踏板的中立位置和运动、调节范围。
3 舒适姿势下的A点包络区域求解
使用matlab软件来辅助计算求解,流程如图2所示,可得到A点位置可能的变化范围,通过二次开发,并将三维点坐标数据导入CATIA中,通过逆向工程转换形成脚部舒适域包络图。结果如图3所示。由图3可以看出,身材高大的飞行员的脚蹬踏板初始位置更加靠前才能保证飞行员驾驶时的感觉舒适,这和实际驾驶时的情况是相符的。结合先前确定的座椅的中立位置和可调范围,即可确定脚蹬初始位置和前后运动行程。

图2 A点位置计算流程图
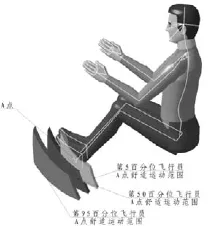
图3 3个百分位飞行员舒适A点区域示意图
4 结论
本文基于飞行员下肢在舒适角度范围内的操纵脚蹬踏板的算法,通过计算飞行员操作脚蹬踏板时,下肢的3个关节不同的运动姿态,利用CATIA软件中的二次开发功能,以三维图形化的方式求解出足底A点的舒适域包络图,实现了符合中国飞行员舒适状态下足底A点区域可视化的计算。证明作者提出的下肢各关节在舒适角度范围内时,脚蹬踏板位置计算方法的可行性。
吕建清(1981-),男,工程师,本科,任职于中航通飞研究院有限公司,研究方向为飞机总体布置。
猜你喜欢
新生代·上半月(2019年6期)2019-09-10
时代英语·高一(2018年4期)2018-09-14
中国自行车(2018年7期)2018-08-14
百科探秘·航空航天(2016年9期)2016-12-01
世界博览(2016年17期)2016-09-28
时代英语·高一(2016年4期)2016-09-21
汽车文摘(2015年11期)2015-12-14
第二课堂(课外活动版)(2015年6期)2015-10-21
销售与市场·管理版(2015年5期)2015-05-05
汽车零部件(2014年4期)2014-06-23
