
一种高精度快速反应跟踪雷达伺服系统设计
2016-12-13 08:41陈章龙王晓楠
舰船电子对抗 2016年5期
陈章龙,王晓楠
(中国船舶重工集团公司第723研究所,扬州 225001)
一种高精度快速反应跟踪雷达伺服系统设计
陈章龙,王晓楠
(中国船舶重工集团公司第723研究所,扬州 225001)
对几种常见的伺服系统进行了简单对比,对一种高精度快速反应跟踪雷达伺服系统设计进行了详细论述,系统具备反应速度快、控制精度高、低速性能好等优点,适用于精密跟踪雷达的伺服系统。
伺服系统;快速反应;高精度
0 引 言
伺服系统就是位置随动系统,由伺服机械结构和伺服控制器组成,优良的伺服系统要求有好的跟踪性能、抗干扰性能、稳态精度、动态过渡过程。
跟踪雷达伺服系统控制器在收到角误差信息后,控制跟踪雷达天线准确地捕获、跟踪目标。跟踪高速运动目标是跟踪雷达的主要任务,其跟踪误差主要表现为动态滞后误差,需要雷达伺服系统有快速反应能力和高的跟踪精度[1]。
1 常用伺服系统介绍
伺服系统通常由电机、传动链、位置/速度敏感装置和配套控制器组成。
传动链的选取方式有减速器和直驱2种。减速器常配合高速电机使用,这种架构设计简单,便于进行惯量匹配,但是传动链带来的齿隙和扭转刚度方面的问题,会造成机械振动,影响伺服系统带宽和控制精度。直驱方式常配合力矩电机使用,电机与负载直接连接,可以提高机械谐振频率,降低结构谐振对系统的影响,提高了伺服带宽、响应速度和控制精度[2]。
2 高精度快速反应伺服系统设计
2.1 系统架构
跟踪雷达伺服系统性能直接影响雷达的跟随能力和跟踪精度,需要伺服系统有快速反应能力和高的跟踪精度。
力矩电机直驱伺服系统满足上述要求,采用力矩电机提高控制性能。力矩电机转矩高,响应速度快,低速性能好,跟踪精度高。其采用直接驱动方式提高机械谐振频率,降低结构谐振对系统的影响,提高伺服带宽、响应速度和跟踪精度。
2.2 跟踪雷达伺服系统设计
跟踪雷达伺服系统设计主要包括伺服系统的静态设计和动态设计两部分。
2.2.1 伺服系统静态设计

执行元件选取力矩电机,同跟踪雷达天线轴承直接连接的直驱方式。由于负载力矩中各分量的最大值均为瞬时出现,力矩电机峰值力矩即最大堵转力矩Mp应满足:Mp≥Mr+Mj+Mf。
力矩电机最大角速度对应的电枢转矩MdL要求MdL≥ML。
驱动器的选取要与力矩电机及伺服系统线性范围相匹配,并具备规定的过载能力。
跟踪雷达伺服系统选用与力矩电机配套的高精度多级旋变作为天线舷角轴、仰角轴的反馈测量传感器,对天线位置、速度进行测量,伺服控制计算机对旋变信息进行采集,完成对天线的控制。
2.2.2 伺服系统动态设计
伺服系统动态设计主要是对稳定裕量、伺服带宽、过渡过程品质和跟踪精度的设计。
稳定裕量设计要求相位裕度γ≥30°,幅值裕度Gm≥6dB。
伺服带宽βn采用变带宽设计,在距离较远时,测量误差主要是接收机热噪声σi引起的,近距离测量误差主要是伺服系统动态滞后θr引起的,所以伺服带宽βn根据目标距离R成反比例设计,减小测量误差,提高随动精度。
过渡过程品质的设计主要是对过渡过程时间tT和过渡过程超调量σ%的设计,根据伺服带宽βn和相位裕度γ选取合适的tT和σ%,一般要求σ%<30%。
(1)
式中:Ka为加速度常数;T2为一阶微分环节时间常数;T3为惯性环节的时间常数。
系统期望特性如图1所示。

图1 系统期望特性图
图1中3段分别为低频、中频和高频段。ωc为系统截止频率,反映了伺服带宽βn的大小,ω2为第1个转折频率,等于1/T2;ω3为第2个转折频率,等于1/T3。低频段决定了加速度误差Δa,斜率取-40dB/dec;中频段的设计是期望特性设计的重点,雷达伺服系统为最小相位系统,中频段斜率取-20dB/dec;高频段由速度回路闭环特性决定,反应了抑制高频干扰和机械谐振的能力,斜率取-40dB/dec。
跟踪雷达伺服系统采用位置环、速度环、电流环三环,完成对雷达天线的舷角和仰角控制。
电流环的作用是去除电动机反电势影响、减小电枢回路时常数、对结构谐振起到抑制作用。为提高系统鲁棒性,电流环带宽尽量做宽,要求βni≥1kHz。速度环是位置环设计的基础,作用是提高回路动态特性、提高系统相角裕量和鲁棒性。速度环截止频率要求≥4πβn。位置环实现跟踪雷达位置随动,采用方位俯仰式天线座,对伺服方位位置回路误差进行正割补偿[2]。
2.2.3 控制原理
跟踪雷达伺服系统采用高精度多级旋变作为天线舷角轴、仰角轴的反馈测量传感器,对位置、速度进行反馈测量,同轴安装在力矩电机的非负载端。利用多级旋变输出的精粗码组合实现天线舷角、仰角位置量和速度量的测量。由伺服控制计算机实时采集相应转轴的精粗多级旋变输出反馈,完成闭环控制。
跟踪雷达伺服系统原理框图如图2所示。

图2 原理框图
3 伺服系统性能对比
将力矩电机直驱伺服系统过渡过程品质、跟踪精度与常用的高度电机加传动链伺服系统进行比较,结果如图3所示。
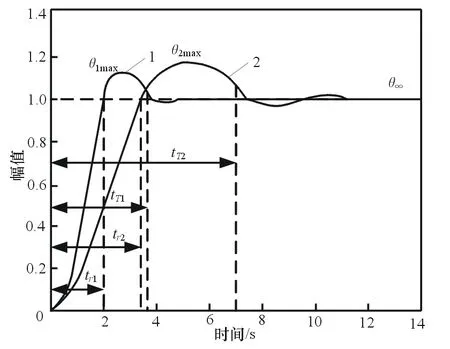
图3 过渡过程对比图
图3中1为力矩电机直驱伺服系统过渡过程,2为高度电机加传动链伺服系统过渡过程。可见前者上升时间tr、过渡过程时间tT、超调量σ%及振荡次数均小于后者,力矩电机直驱伺服系统具备响应速度快、精度高、低速性能好的优点。
对2种伺服系统跟踪精度进行录取后对比如图4所示。
图4中系列1为力矩电机直驱伺服系统,系列2为高度电机加传动链伺服系统。可见系列1较系列2在跟踪精度上有很大提高。
综上所述,本文设计的力矩电机直驱伺服系统具有反应速度快、跟踪精度高、低速性能好等优点,特别适用于精密跟踪雷达的伺服系统。

图4 跟踪精度对比图
[1] 丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2002.
[2] 王德纯,丁家会,程望东,等.精密跟踪测量雷达技术[M].北京:电子工业出版社,2007.
DesignofAServoSystemforRapidReactionTrackRadarwithHighAccuracy
CHENZhang-long,WANGXiao-nan
(The723InstituteofCSIC,Yangzhou225001,China)
Thispapercomparesseveralcommonservosystems,discussesaservosystemforrapidreactiontrackradarwithhighaccuracyindetail.Thesystemhasmeritsofrapidreaction,goodcontrolaccuracy,goodperformanceunderconditionoflowvelocity,whichadaptstotheservosystemofexacttrackradar.
servosystem;rapidreaction;highaccuracy
2016-07-21
TN
A
CN32-1413(2016)05-0074-03
10.16426/j.cnki.jcdzdk.2016.05.019
猜你喜欢
电工技术学报(2022年20期)2022-10-29
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
政工学刊(2021年12期)2021-12-22
能源工程(2021年5期)2021-11-20
航天工业管理(2020年9期)2020-12-28
电子制作(2019年7期)2019-04-25
专用汽车(2018年10期)2018-11-02
航天制造技术(2016年6期)2016-05-09
燕山大学学报(2015年4期)2015-12-25
