
电机驱动器A3983在实时三维超声成像系统中的应用
2016-12-15 08:37梅茹卢欢李德来汕头市超声仪器研究所有限公司汕头515041
中国医疗器械信息 2016年11期
梅茹 卢欢 李德来 汕头市超声仪器研究所有限公司 (汕头 515041)
电机驱动器A3983在实时三维超声成像系统中的应用
梅茹 卢欢 李德来 汕头市超声仪器研究所有限公司 (汕头 515041)
本文从A3983工作原理、硬件设计以及三维超声图像软件设计等方面,介绍了电机驱动芯片A3983在实时三维超声成像系统中的应用方法。
A3983 三维超声图像 电机驱动
近年来,随着科技的不断进步,三维超声成像技术越来越广泛的应用在临床诊断中。三维超声成像又分为静态三维成像和动态三维成像。动态三维成像是在静态三维成像的基础上加入时间维度参数,用整体显像法重建感兴趣区域准实时活动的三维图像,又称为实时三维成像或四维成像。实时三维成像提供多领域多方面的应用,它能显示人体内脏器官特别是胎儿的实时活动图像,这使得医生能够根据人体器官或胎儿的运动情况来更精准地发现各种异常,增加了诊断的准确性。
1.系统设计简介
为了得到实时的三维超声图像,本设计采用机械容积探头来获取被测体的三维超声体数据,得到的三维超声体数据经过超声硬件模块的预处理送给计算机,最终在计算机中通过相关计算将采集到的三维超声体数据重构成实时的三维超声图像。图1为系统框图。
机械容积探头是在探头内部增加了步进电机和传动装置,通过控制步进电机的转动来使探头芯部产生平移、摆动和旋转的动作,从而采集到被测体的三维超声体数据。
本设计采用电机驱动器A3983配合FPGA的驱动逻辑代码,来实现控制探头中步进电机运动的功能。超声回波信号经过FGPA预处理后,通过PCIe总线送给计算机,在计算机中经过相应的图像处理最终得到三维立体成像。

图1. 系统框图
2.A3983工作原理[1]
A3983是一款易于操作的具有内置转换器的微电机驱动器。它可以以全步、半步、四分之一步和八分之一步的步进模式来驱动双极步进电机,其输出驱动能力可以高达电压35伏、电流正负2安。图2是A3983的原理框图。
A3983的使用方法非常简单,有STEP(步进)、DIR(方向)两条输入线输入,从STEP每输入一个脉冲就完成一个步进,输出的电机驱动信号由场效应管组成的双全桥完成。在两个全桥输出和所有的场效应管中,电流由固定关断时间PWM控制电路调整。每一次步进时,每个全桥的电流由外部电流检测电阻(RS1和RS2)、参考电压(VREF)和DAC输出电压决定。
在上电或复位时,脉冲分配器设定DAC和相电流的极性为初始状态,同时设定两相电流调整器的模式为混合衰减模式。当STEP引脚有步进指令时,脉冲分配器自动将DAC转到下一个电平。微步模式由MS1和MS2两个输入脚的组合形式决定。
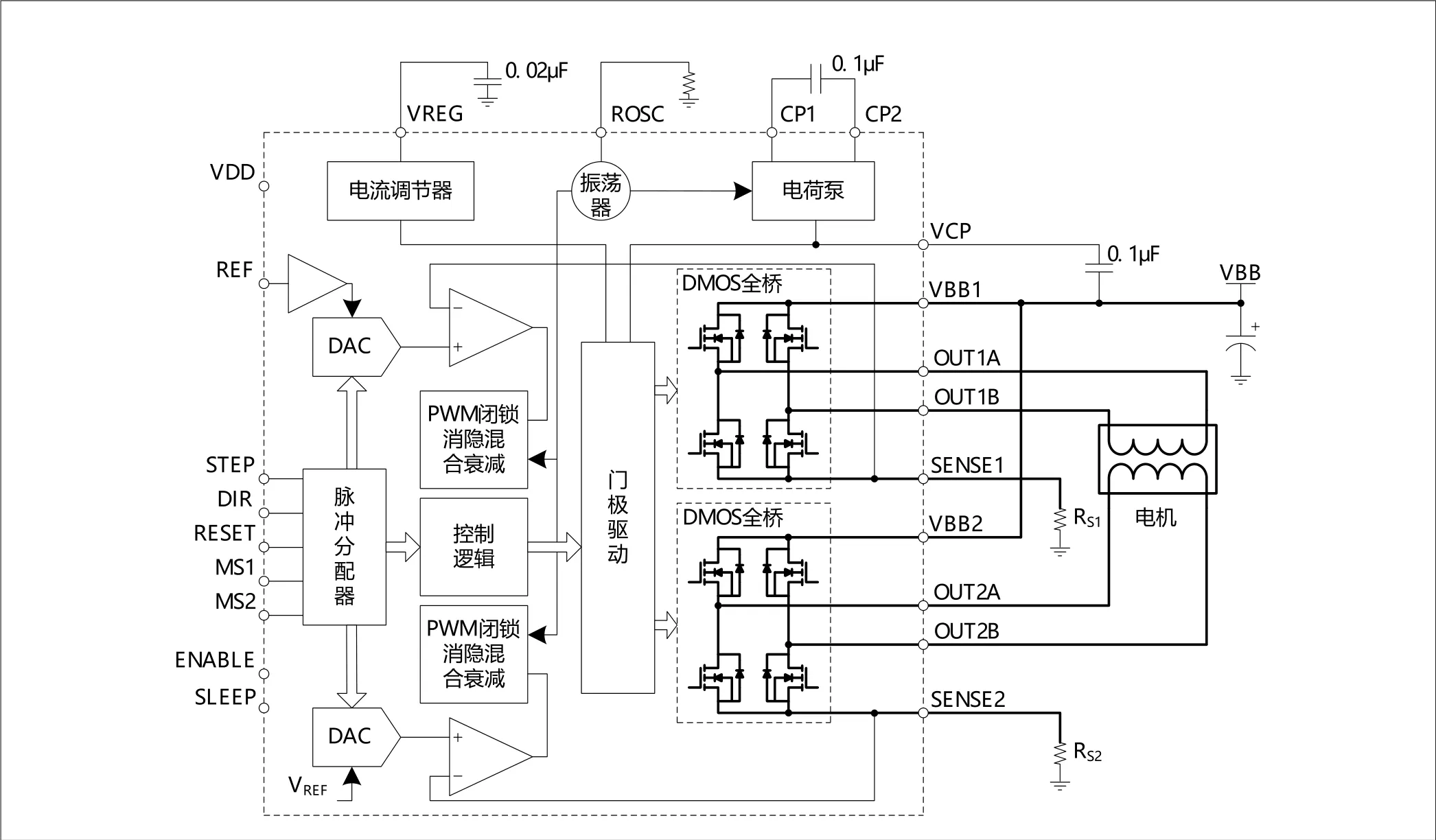
图2. A3983原理框图
当进行步进时,如果DAC新的输出电平比其前一个输出电平低,则当前活动的全桥上电流衰减模式会被设为混合模式。如果DAC新的输出电平比其前一个输出电平高,则当前活动的全桥上电流衰减模式会被设为慢速。这种电流衰减模式的自动选择可以减少由于电机反电动势引起的电流波形扭曲,从而可以改善性能。
3.硬件设计
3.1 A3983硬件电路
本设计中,通过FPGA的普通IO脚与A3983各控制引脚连接。A3983模块的电路原理图如图3所示。
FPGA通过七条控制信号与A3983连接,通过控制这些信号的高低电平来实现对机械容积探头内电机的控制。各控制信号定义如下:
RESET:复位信号。该信号有效时,脉冲分配器被复位到初始状态,同时关断所有的场效应管输出。
STEP:步进信号。每个上升沿可以使电机前进一个增量,这个前进的增量大小由MS1和 MS2两个控制引脚决定。

表1. 步进模式真值表
DIR:方向控制信号。该信号控制电机转动方向。
MS1、MS2:步进模式信号。根据两个信号的不同组合,可以选择不同的步进模式,其组合形式对应的步进模式如表1所示。
ENABLE:场效应管输出使能信号。
SLEEP:休眠模式信号。该信号有效时芯片进入休眠模式,减少功耗。
除了以上几条控制信号外,还需要根据电机的型号设置SENSE1和SENSE2引脚上所接限流电阻RS1和RS2的阻值。参考电压VREF、输出的最大电流IMAX以及限流电阻RS的关系可以由公式(1)获得:


图3. A3983电路原理图
在本设计中,驱动电压采用15V,根据电路中R2和R3的阻值可以算出参考电压VREF的电压值约为3.8V,RS1和RS2的阻值分别为1Ω,则根据公式(1)可以算出最大电流为0.475A。
在电路设计时,需要在CP1和CP2引脚之间以及VCP和VBB引脚之间各连接一个0.1μF的陶瓷电容,以便于在CP1和CP2引脚产生高于VBB的门电平时来作为驱动DMOS栅极电源的蓄能器。另外,VREG引脚上的电压是由A3983内部产生的,该电压用于DMOS漏极输出,需要在该引脚上加一个对地的0.22μF的去耦电容。
3.2 FPGA逻辑设计
本设计中,电机控制和图像预处理FPGA采用Xilinx公司的XC6SLX100芯片。该芯片主要完成对A3983芯片的控制逻辑以及超声回波信号的预处理功能。
对被测体进行超声检测时,我们可以将待检测的部分看做是一个由多个切面组成的三维体,每个切面可以得到一幅超声图像,连续不断的依次对这些切面进行超声检测,最终根据一定的方法就能重构成实时的三维体图像。
本设计中,我们通过FPGA控制A3983的各输入引脚,使得A3983输出步进脉冲。通过控制A3983不同的步进模式和步进方向,就能控制机械容积探头中的电机正转或反转,从而可以带动探头不断的摆动。探头摆动时,就会对被测体多个连续的切面进行超声检测并得到多个切面的超声图像,由这些切面的超声图像就可以重构成被测体的实时三维超声图像。
图4是FPGA中对A3983的控制流程图。初始状态时,A3983处于休眠模式,当进入三维超声检测模式时,根据软件提供的参数来判断是对容积探头中的电机进行复位还是开始正常的三维体扫描。
为了使探头摆动,需要控制电机正转和反转。在进行正常的三维超声扫描时,首先要设置A3983的方向控制引脚和步进模式来控制电机正转。当完成一个三维体扫描后,再通过设置A3983的方向控制引脚使电机反转来逆向完成一个三维体的扫描。控制电机使其不断的正转或反转,就可以使探头不断的进行摆动,从而可以得到连续的三维超声体数据。

图4. A3983逻辑控制流程
当对三维体扫描完成后,需要通过复位操作控制探头中的电机按一定的方式运动,最终使探头停留在某个特定的位置上。
采集到的三维体超声数据经过波束合成、动态滤波、对数变换等一系列图像预处理操作,最终通过PCIe总线接口送给计算机。
4.软件设计
由硬件送给计算机的三维超声体数据需要通过软件运算的方法将其重构成一个三维体进行显示。
重构三维体的方法主要有面绘制和体绘制两大类,面绘制是通过几何单元拼接拟合物体表面来描述三维结构,而体绘制是直接将体素投影到显示平面上。本设计采用体绘制的方法实现三维超声图像的显示。
在进行体绘制时,首先对硬件送来的原始三维超声体数据进行格式转换,剔除冗余数据后得到所需的体图像数据,然后将反映同一物质的采样数据点归类并对采样点进行赋值,此后再对体数据进行三维坐标变换及重采样,最后利用光线投射法将合成的图像显示在屏幕上。图5是利用体绘制法最终得到的两幅胎儿三维超声图像。
The Application of Motor Driver A3983 in Real-Time 3D Ultrasonic Imaging System
MEI Ru LU Huan LI De-lai Shantou Institute of Ultrasonic Instruments Co., Ltd., (Shantou 515041)
In this article, the application of motor driver A3983 in real-time 3D Ultrasonic imaging system is introduced from the operational principle of A3983, the design of hardware circuit and 3D ultrasound image software design.
A3983, 3D ultrasound image, motor drive
1006-6586(2016)06-0044-04
TH776
A
2016-03-24
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
科学家(2021年24期)2021-04-25
哈尔滨轴承(2020年3期)2021-01-26
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
制造技术与机床(2019年7期)2019-07-22
童话世界(2019年17期)2019-07-04
通信电源技术(2018年5期)2018-08-23
童话世界(2018年17期)2018-07-30
电子制作(2017年10期)2017-04-18
