微控制器技术在智能科学与技术本科教学中的应用
2016-12-19 12:18陈启丽陈雯柏许晓飞
计算机教育 2016年10期
陈启丽 陈雯柏 许晓飞

摘要:分析微控制器技术在人工智能领域的应用现状,介绍几种机器人的结构并说明设计方案,基于微控制器技术探讨可实现智能算法的机器人硬件平台在本科教学中的应用,以期为学生学习、理解及应用专业知识提供相应的硬件平台。
关键词:智能科学与技术;智能机器人平台;微控制器技术
0引言
机器人是一个典型的机电一体化系统,它综合了机械设计、电工电子、传感器、计算机、微控制器编程控制系统和人工智能等学科的内容,是智能科学与技术本科专业很多课程教学和实验的理想的平台。同时学生经常参加各种机器人相关的比赛,旨在通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也深化和应用智能科学与技术专业所学的知识。
与研究生相比,本科生对动手设计的兴趣要远远高于对理论知识的学习。针对本科生的这一特点,为本科二、三年级的学生设计一些创新性的机器人项目,引导学生自己组队,搭建相应的硬件电路,为他们在高年级深入理解和学习智能科学与技术的专业课程提供一个硬件平台,打下一定的专业基础,并通过这些项目的实施提高学生的综合应用和创新能力。
1微控制器技术在人工智能领域的应用现状
微控制器技术应用超大规模集成电路技术把中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O口、中断系统、定时器等功能(部分包括脉宽调制电路、模拟多路转换器、显示驱动电路以及A/D转换器等)集成到一个芯片上,组成一个体积小但功能强大的计算机系统。该芯片可外接多种传感器,实现对多种信息的采集处理,结合信息融合技术,可以实现机器各种预期的智能行为(如导航装备、汽车的各种智能控制系统、智能家电等)。
高效地融合微控制器技术与人工智能技术,将智能算法嵌入到机器人微控制器中,系统则会呈现出各种智能行为。可实现智能算法的机器人平台主要集中在以下几个方面:智能家庭清扫类机器人、多传感器融合的智能小车、视觉类机器人等。智能家庭清扫类机器人为机器人避障、路径规划等理论提供相应的平台,方便学生理解、学习根据某个或某些优化准则,在机器人工作空间中寻找一条从初始状态到目标状态避开障碍物的最优路径等相关知识;视觉类机器人为图像处理、模式识别等相关的理论提供相应的平台,方便学生理解、学习图像的获取和处理的智能算法;多传感器信息融合类机器人可以为多传感器融合技术提供一个硬件平台,方便学生理解、学习、综合应用控制理论、信号处理、人工智能、概率和统计等相关知识。
2可实现智能算法的机器人平台设计
各类机器人平台的总体架构大致相同,都需要包含系统输入(传感器)子系统、决策子系统、通讯子系统以及运动控制子系统。各个子系统的功能需要硬件设计和软件设计共同实现。文中结合微控制器技术重点阐述硬件设计部分,包括机器人的层次架构、硬件选型、电路设计等。结合本科教学的特点,硬件设计从学生的理解能力、可操作性、可实现性、后期智能算法的可应用性等多个方面综合考虑,应用微控制器技术,实现以下3种机器人平台。
2.1智能家庭清扫类机器人
家庭清扫类机器人的硬件平台相对比较成熟,市场上的国内外的产品也较多。此类机器人任务较为单一,传感器种类较少,硬件平台搭建较为容易,对学生而言是一个较为理想的智能机器人平台。
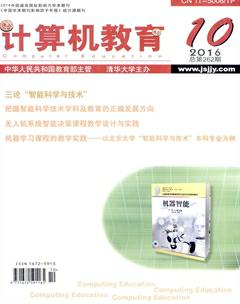
该平台的硬件设计采用单CPU架构,以轮式机器人为主。车体由车架、电池组、直流电机、车轮、微控制器、传感器等组成。外部传感器把环境信息输入到单片机开发板,单片机开发板对信息进行处理,处理后的决策信号通过扩展转接板传给电机,控制电动转动,从而实现机器人的运动,系统的硬件结构图如图l所示。
为保证机器人运动灵活且易于控制,我们采用圆形车体十三轮式移动机构。两主动轮差速驱动,第三个万向轮起辅助支撑的作用。传感器的布置有多种方案供选择,学生选择不同的位置安装传感器会影响到该机器人后期避障、路径规划等智能算法的设计及研究。微控制器采用TI公司的MSP430F149单片机,通过超声/红外传感器感知环境信息,使用L298电机驱动模块驱动左右两个直流电机,使用PWM技术对电机的速度进行调节和控制,通过MAX7219驱动6位LED数码管显示器显示系统运行过程中的各种信息。
2.2视觉类机器人
传统的移动机器人视觉系统通常采用通用计算机进行视觉信息处理。随着微控制器技术的不断发展,高端的微控制器也具备了强大的数据处理能力。
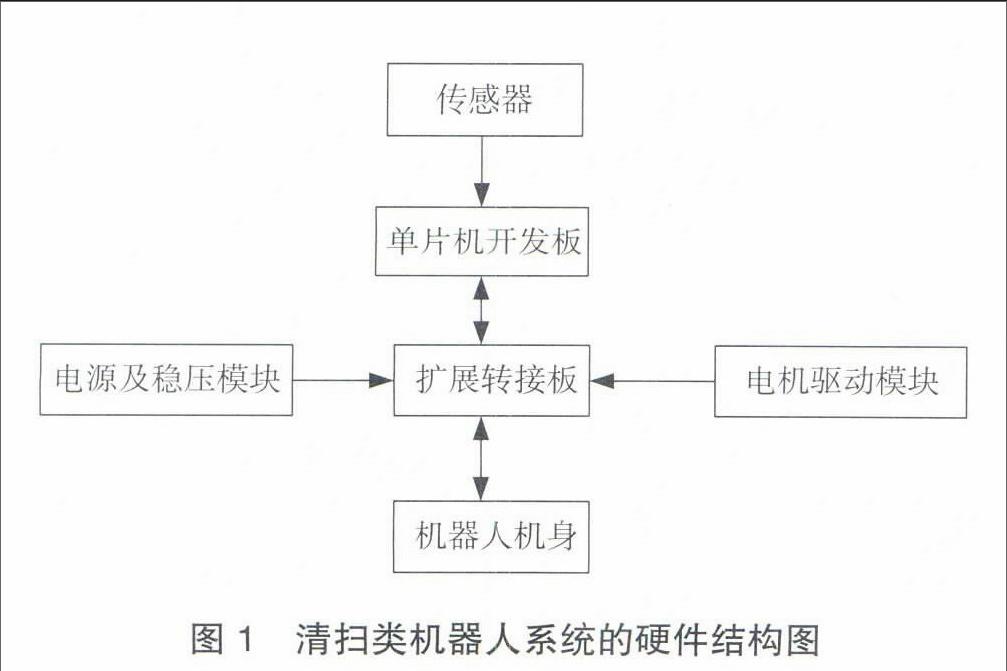
由于视觉信息处理计算量很大,为了使设计的视觉类机器人平台能够应用已定的图像处理算法,视觉类机器人的层次架构采用二级CPU架构,主从式控制实现,如图2所示。一级CPU采用ARM微控制器,嵌入裁剪的Linux系统,负责图像信息的获取、处理、系统管理等操作;二级CPU采用单片机微控制器实现对机器人运动的控制。
整个系统的硬件选型为搭载900MHz Quad-core ARM Cortex-A7处理器的树莓派开发板、MSP430F149开发板、摄像头、稳压电源模块、直流电机、L298N电机驱动板、机器人机体、电源(12V蓄电池)和转接板。
控制机器人移动的底盘控制方案除了前面清扫类机器人用到的双轮差动驱动以外,还有一种全向驱动方式。全向驱动方式灵活性更强,其中三轮驱动的方式具有较强的稳定性。结合视觉类机器人需求,该平台采用全向驱动方式实现机器人的移动。
2.3多传感器信息融合类机器人
多传感器信息融合技术是近年来十分热门的研究课题,它结合了控制理论、信号处理、人工智能、概率和统计的发展,为机器人在各种复杂的、动态的、不确定或未知的环境中工作提供了一种技术解决途径。信息融合的研究内容极其丰富,涉及的基础理论较多,如有参数模板法、聚类分析、支持向量机、K均值聚类等分类方法;自适应共振理论(ART)、自适应共振理论映射和模糊自适应共振理论网络等自适应的方法进行传感器融合;专家系统、神经网络和模糊逻辑等人工智能方法对融合大量的传感器信息,用于非线性和不确定的场合。
单级、二级CPU架构只能满足简单的多传感器技术的需求(如清扫类、视觉类机器人等),复杂的多传感器融合类机器人的层次结构采用“多CPU架构+分布式控制”方式实现。在主控机上实现多传感器信息融合算法,下位机则可根据需求设计多个CPU,每个CPU选用单片机控制机器人的不同部位,承担固定任务,使得机器人系统高速、稳定运行。同时每个微控制器负责获取不同类型的传感器信息,通过无线通信模块将数据传给上位机。上位机通过智能分析算法得到决策,决策数据通过无线模块传到微控制器去执行,如图3所示。
整个系统的硬件选型为高性能PC机(上位机)、MSP430F149(下位机微控制器)、WIFI模块、各种传感器及执行机构(传感器和执行机构由学生根据机器人项目的环境信息、具体的功能等确定)。
3机器人平台在教学过程中的实践及效果
在智能科学与技术专业的本科实践环节中,组织大二、大三具备C语言基础、单片机基础的学生,3~5人自由组队,根据教师给出的项目任务书进行项目设计、项目实施以及项目答辩等各个环节。图4展示的是部分小组制作的机器人实物。其中图4(a)所示的是一个基于超声传感器的轮式机器人。显示屏可显示机身距离障碍物的距离,该机器人只包含一个微控制器MSP430开发板。基于超声传感器检测的数据实现对机器人的控制。图4(b)所示的是一个视觉机器人,该机器人包含两个微控制器,一个为树莓派开发板,另一个为MSP430开发板。树莓派开发板主要用于处理图像信息,MSP430开发板主要用于控制机器人的运动。图4(c)所示的是一个多传感器融合的机器人系统。压力传感器、MPU6050传感器等检测机器人自身状态的传感器数据通过MSP430开发板外接的WIFI模块传给上位机,上位机的决策也可通过WIFI模块传给单片机控制器。
这些机器人基本上都可通过软件设计实现相关的智能算法,比如图4(a)可实现路径规划的相关算法;图4(b)则可实现一些图像处理、图像识别算法;图4(c)则可以在上位机使用智能算法对传感器数据进行分析,实现机器人稳定行走的相关控制。部分学生在完成机器人制作的基础上,结合课堂上学习的智能算法,优化了软件设计及算法实现,取得了一定的成果。
4结语
教研组充分考虑智能科学与技术专业本科教学要求,精心研究及设计了基于微控制器技术的各类可实现智能算法的机器人硬件平台,并应用到学生的动手实践环节。实践表明,实物实验很大程度上增加了学生的学习兴趣,锻炼了低年级学生的动手能力、实践能力及创新能力,此外,学生制作的机器人平台可实现一些相关的智能算法,可以有效地引导学生学习理解专业知识,为大三、大四的学习及应用智能专业知识打下一个良好基础。
(编辑:彭远红)