
GNSS+SINS组合导航地固系高度阻尼算法
2016-12-20 09:59丁磊香许厚泽蔡小波
测绘通报 2016年11期
丁磊香,许厚泽,王 勇,柴 华,蔡小波
(1. 河南城建学院,河南 平顶山 467036; 2. 中国科学院测量与地球物理研究所大地测量学与地球动力学国家重点实验室,湖北 武汉 430077)
GNSS+SINS组合导航地固系高度阻尼算法
丁磊香1,2,许厚泽2,王 勇2,柴 华2,蔡小波2
(1. 河南城建学院,河南 平顶山 467036; 2. 中国科学院测量与地球物理研究所大地测量学与地球动力学国家重点实验室,湖北 武汉 430077)
GNSS+SINS组合导航在地固系中计算有诸多优点,但GNSS信号缺失时的高度阻尼比较复杂。本文从空间直角坐标系与大地坐标系的关系出发,结合地固系捷联惯导的导航方程,提出了一种地固系高度阻尼算法。经仿真测试证明,应用此算法在地固系高度阻尼,可以达到与导航系相同的效果,证明了算法的有效性。
地固系;GNSS+SINS组合导航;高度阻尼;导航系
相比导航系,全球卫星导航系统+捷联惯导系统(GNSS+SINS)组合导航在地固系(ECEF)中计算,编排效率提高约40%,Kalman滤波效率提高约10%,在地固系中的计算比导航系计算综合效率提高约30%[1-2]。另外,在GNSS+SINS组合导航中,GNSS的数据处理是在地固系进行的,选取地固系作为SINS的计算坐标系无需GNSS导航结果的转换[3],地固系特别适合于GNSS+SINS组合应用领域[2]。针对SINS在地固系中的计算,文献[4—5]作了有益的研究。
但GNSS+SINS组合导航在地固系计算同样存在不足,相比导航系,高度阻尼复杂。当GNSS信号较好时,是不需要高度阻尼的,但当信号被遮挡时间较长时,高度通道是发散的,此时需要高度阻尼。相比导航系中的仅在高度通道增加阻尼的处理,由于惯导高度通道发散将影响到地固系的3个坐标值,地固系的阻尼算法将更为复杂。针对此问题,本文从空间直角坐标系与大地坐标系的关系出发,结合地固系捷联惯导的导航方程,提出一种地固系高度阻尼算法。经仿真测试证明,应用此算法在地固系高度阻尼,可以达到与导航系相同的效果,证明算法的有效性。
一、导航方程
1. 坐标系定义
1) 地固系(e系):原点在地球质心,x轴指向格林尼治平均子午圈,y轴与x、z轴正交,z轴平行于地球自转轴。
2) 当地水平坐标系又称导航系(n系):原点在载体中心,x轴沿卯酉圈指向东,y轴沿子午圈指向北,z轴椭球外法线指向天顶。
3) 载体系(b系):原点在载体中心,x轴指向载体的右方,y轴指向载体的前方,z轴指向载体上方。
2. 地固系导航方程
捷联惯导系统在不同的坐标系有不同的导航方程,由于GNSS+SINS组合导航在地固系计算中有诸多优点,GNSS+SINS组合导航通常在地固系中计算,在此直接给出地固系导航方程[3]
(1)
式中,r、v、C分别为位置、速度与转换矩阵,上下标的含义同文献[2]。
依据导航方程可以求出速度和位置

(2)
re(t+Δt)=re(t)+(ve(t+Δt)+ve(t))Δt/2
(3)
二、空间直角坐标系与大地坐标系的相互转换
由大地坐标系向直角坐标系转换有严密的计算公式,在此直接给出
(4)
式中,B、L、H分别为大地纬度、大地经度与大地高;N、e分别为参考椭球卯酉圈曲率半径与第一偏心率;(xe,ye,ze)为地固系直角坐标。
由直角坐标转换经纬度有许多不同解法[6-10],一般分为3类:封闭解法、迭代法、近似算法,工程应用一般使用近似算法。本文推荐使用文献[9]的近似算法,该计算方法既简单,又有很高的计算精度,纬度的计算精度优于10-12(10-7角秒)[11],可以满足需求,详细的计算公式如下
(5)
式中,a为参考椭球的长半轴;b为椭球的短半轴;e′为椭球的第二偏心率;其余符号含义与式(4)相同。
三、地固系高度阻尼算法
在导航系高度阻尼比较容易实现,直接引入惯性指示高度Hn与外部观测高度Ha之间差值(Ha-Hn)的负反馈,即用外部观测高度代替惯性指示高度。
要想实现地固系高度阻尼,首先需要把高度从地固系3个直角坐标解耦分离,具体做法是根据式(5)把地固系直角坐标转换为大地坐标,记为(Bn,Ln,Hn),得到GNSS+SINS导航高度与导航经纬度,当GNSS信号被遮挡时,导航高度也称为惯性指示高度;然后借鉴导航系的高度阻尼方法,直接用外部观测高度代替惯性指示高度,得到阻尼后的大地坐标(Bn,Ln,Ha);最后把大地坐标转换为地固系直角坐标,完成高度阻尼。阻尼后的地固系直角坐标可写为
(6)
关于外部观测高度的选择,如果有引入其他系统提供高度信息(气压高度或无线电高度信息等),直接应用即可。但GNSS+SINS组合导航通常没有此类信息,因此可以借鉴纯惯导对高度阻尼的做法,在GNSS信号缺失时,把外部观测高度设为常值,这个常值可为GNSS信号较好时确定的高度值。
四、仿真验证
为了验证算法的有效性,对该算法进行了仿真,并与导航系高度阻尼结果进行比较,用来验证算法的有效性。仿真条件如下:陀螺零漂0.01°/h,加表零偏10-4g(g为重力加速度),载体沿赤道以10 m/s匀速直线运动,比较地固系与导航系24 h的高度阻尼下的导航位置误差,结果如图1、图2所示。

图1 地固系高度阻尼下的经纬度误差
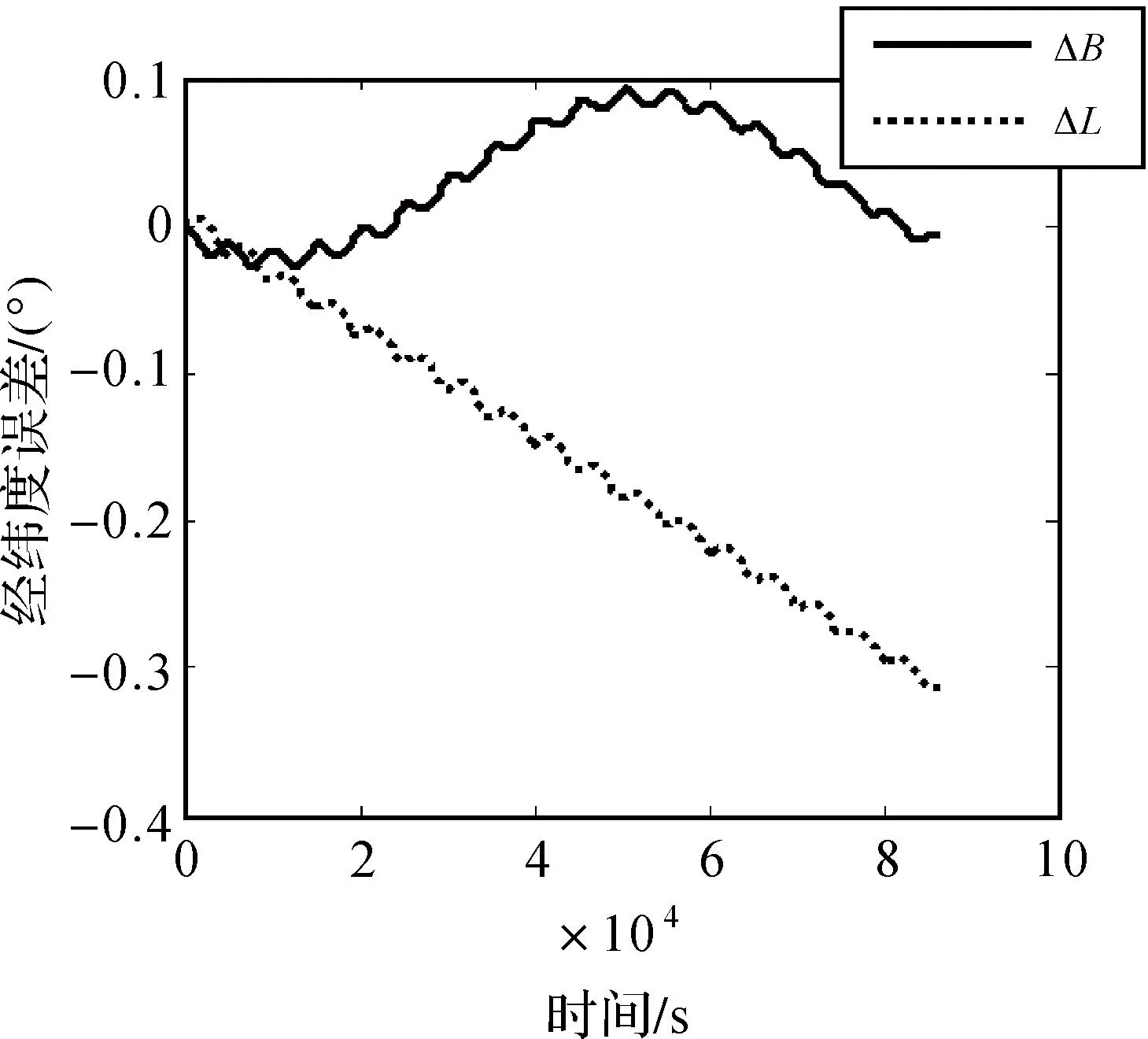
图2 导航系高度阻尼下的经纬度误差
比较图1与图2可以看出,地固系与导航系的经纬度误差几乎相同,其差异可以忽略;经纬度误差呈现明显的舒拉震荡,纬度误差存在24 h震荡的趋势,经度误差存在无界增长的趋势,误差趋势和导航系相同,证明地固系的高度阻尼算法是有效的。
五、结束语
针对GNSS+SINS组合导航GNSS信号缺失时间较长时的高度阻尼,本文从空间直角坐标系与大地坐标系的关系出发,结合地固系捷联惯导的导航方程,提出了一种地固系高度阻尼算法,并与导航系进行了比较。结果表明,阻尼后的位置误差完全相同,证明了算法的有效性。
[1] WEI M, SCHWARZ K P. A Strapdown Inertial Algorithm Using an Earth-fixed Cartesian Frame[J]. Navigation, 1990, 37(2): 153-167.
[2] 董绪荣, 张守信, 华仲春. GPS/INS组合导航定位及其应用[M]. 长沙:国防科技大学出版社, 1998:78-120.
[3] 柴艳菊. 挖掘信息提高GPS/INS导航精度和理论与方法研究[D]. 武汉: 中国科学院测量与地球物理研究所, 2008:16-18.
[4] 柴华, 王勇, 许大欣, 等. 地固系下四元数和卡尔曼滤波方法的惯导初始精对准研究[J]. 武汉大学学报(信息科学版), 2012, 37(1):68-72.
[5] 张秋昭, 张书毕, 王坚, 等. 露天矿卡车低成本GPS/INS组合导航系统动态对准模型[J]. 煤炭学报, 2013, 38(8):1362-1367.
[6] TURNER J D. A Non-iterative and Non-singular Perturbation Solution for Transforming Cartesian to Geodetic Coordinates[J].Journal of Geodesy,2009,83(2):139-145.
[7] JONES G C. New Solutions for the Geodetic Coordinate Transformation[J]. Journal of Geodesy, 2002, 76(8): 437-446.
[8] VERMEILLE H. Computing Geodetic Coordinates from Geocentric Coordinates[J]. Journal of Geodesy, 2004, 78(1/2): 94-95.
[9] BOWRING B R. The Accuracy of Geodetic Latitude and Height Equations[J]. Survey Review, 1985, 28(218): 202-206.
[10] 桑金. 空间大地直角坐标与大地坐标反算的非迭代法[J]. 测绘通报, 2000(5): 37,39.
[11] 黄谟涛, 翟国君, 管铮, 等. 空间直角坐标和大地坐标的转换[J]. 解放军测绘学院学报, 1998, 15(3): 164-168.
Altitude-damping Algorithm of GNSS+SINS Integrated Navigation under ECEF Frame
DING Leixiang,XU Houze,WANG Yong,CHAI Hua,CAI Xiaobo
2016-01-29;
2016-07-01
国家自然科学基金(41274084;41074001;41374086)
丁磊香(1982—),男,博士,研究方向为GNSS+INS组合导航理论及应用。E-mail: dingleixiang@163.com
丁磊香,许厚泽,王勇,等.GNSS+SINS组合导航地固系高度阻尼算法[J].测绘通报,2016(11):12-14.
10.13474/j.cnki.11-2246.2016.0354.
P228
B
0494-0911(2016)11-0012-03
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
科技资讯(2018年10期)2018-10-26
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
新课程·中旬(2017年1期)2017-03-27
环球时报(2016-08-01)2016-08-01
