基于LabVIEW的旋转倒立摆系统设计
2017-01-07 11:36白富斌董君浩侯丽鹏
现代商贸工业 2016年9期
关键词:PID算法
白富斌+董君浩+侯丽鹏


摘 要:以LabVIEW为平台,结合PID算法,对旋转倒立摆系统设计进行设计研究。
在倒立摆旋转过程中,通过编码器将判断位置与角度的相应电信号反馈给上位机,上位机通过运行程序计算并输出信号进而来控制摆杆的的角度、位置,使倒立摆的摆杆不会下垂。
关键词:旋转倒立摆;PID算法;LabVIEW;反馈调节
中图分类号:TB
文献标识码:A
doi:10.19311/j.cnki.1672-3198.2016.09.096
0 引言
倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统。在控制过程中,能有效地反映诸如鲁棒性、随动性等许多控制中的关键问题,是检验各种控制理论的理想模型。因此对倒立摆系统的研究在理论和方法上均有着深远的意义。
本文中,用增量式旋转编码器、伺服电机、伺服驱动器、数据采集卡、液晶显示模块等制作了一个一级旋转倒立摆系统,用PID算法,在LabVIEW中编程,进行控制测试及调整,最后实现对倒立摆的精准控制。
1 倒立摆系统的电路设计
旋臂一端与伺服电机连接并由伺服电机驱动,可绕转轴在旋转水平面内旋转,旋转臂另一端固定有一个旋转编码器,旋转编码器连接着摆杆,当旋转臂转动时会带动摆杆在与编码器转轴旋转方向内旋转。如图1所示。
2 系统工作原理
编码器将角位移电压信号送到控制器,根据状态反馈控制器将此电压信号输入LabVIEW前面板中,通过程序计算出相对应的输出信号,再给PID模块输出相应的脉冲信号,发送给伺服驱动器,再由伺服驱动器使电机转动,进而实现对摆杆的控制
3 旋转倒立摆的PID控制算法
控制系统中通过对给定值与反馈值取偏差,然后将偏差的比例、积分、微分,通过线性组合转化为控制量;在连续控制系统中,PID控制器的输出u(t)与输入e(t)之间成比例、积分、微分的关系如下图2。
其中Kc,Ti,Td分别为比例系数、积分时间常数和微分时间常数;T为采样周期;k采样序号,k=0,2,……:u(KT)为第k次采样时刻的计算机输出值;e(KT)为第k次采样时刻输入的偏差值;e(KT-T)为第k次采样时刻输入的偏差值。
PID算法的调试过程的几个步骤:
(1)把积分和微分归零,增加比例的参量,使系统产生振荡;
(2)减少比例的参量,找到振荡点的临界值,并做记录;
(3)增大积分的参量,让积分参数去接近事先设定的一个目标值;
(4)当给系统通电之后观察超调、振荡还有稳定时间是不是达到了预期的效果;
(5)分析超调和振荡的数据之后,按照系统的调试,增加微分参数的比重。
4 LabVIEW控制以及程序运行流程
NI公司的LabVIEW作为一种图形化编程语言,使编写程序代码图形化,使编程变得简单,便于设计编程,调试,检查等。
LabVIEW的动态仿真过程:
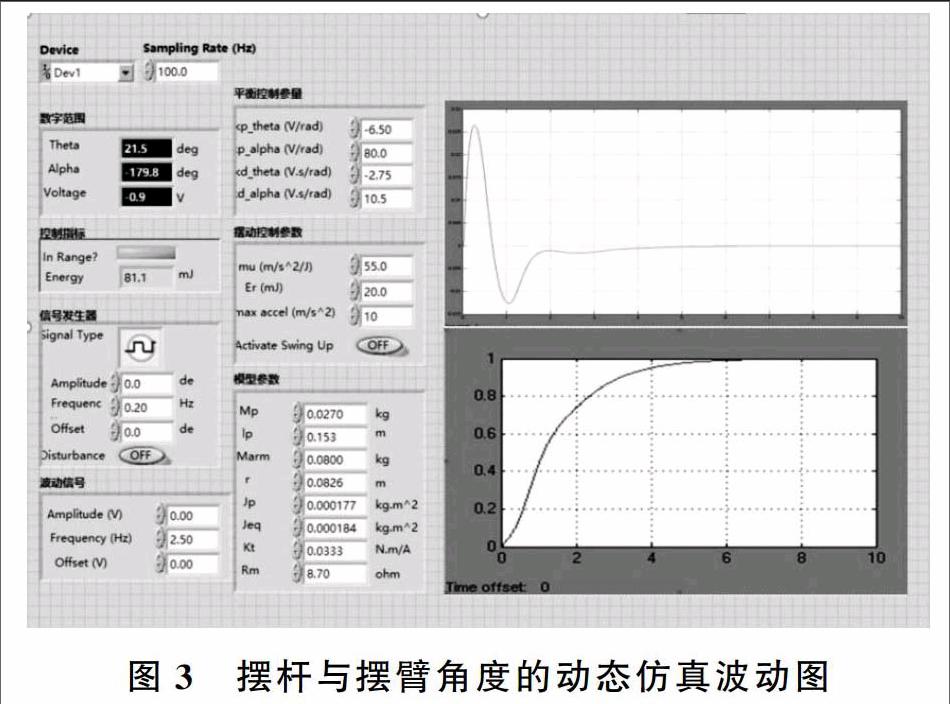
在LabVIEW前面板给定一个电压值,然后经过程序的运行与参数的调整,实现对倒立摆系统运行情况的仿真。摆臂角度与摆杆角度的仿真结果如图3。
仿真结果分析:
从仿真结果可以判定旋转倒立摆能较好的根据规定的轨道按照控制信号进行运转的。
从开始到前0.4秒电机的转轮做加速运动,悬臂的转动幅度不断增大。
在旋臂加速后迅速给其一个制动的信号,使得旋臂的速度能迅速减小,此时摆杆依靠惯性,实现摆杆的倒立。
从第2秒到第5秒,系统变化比较平缓,实现了系统运动的平稳。
从第5秒过后,摆臂的摆动角度没有发生明显的改变,系统进入到平衡状态。
5 结论
本文中,以LabVIEW平台进行编程,实现程序的模块化,在程序的调试过程时比较方便;应用编码器监测摆臂的角度,减少了系统滞后带来的问题。
系统运行结果表明,倒立摆摆杆从起摆至达到稳定状态的过程中,通过LabVIEW编的程序和PID控制算法控制的倒立摆,在稳定性与抗干扰性上都比较好,最终实现了倒立摆摆杆的倒立。
参考文献
[1]王红.基于PID算法的旋转倒立摆系统设计[J].大众科技,2014,(10).
[2]王招治.基于MATLAB的旋转倒立摆的控制与仿真分析[J].机电技术,2012,(4).
猜你喜欢
现代电子技术(2017年10期)2017-05-17
山东工业技术(2017年8期)2017-05-08
现代电子技术(2014年14期)2014-07-24