
基于CAN总线分析的增程式电动汽车控制策略研究
2017-01-09 08:14解来卿罗禹贡刘成祺秦兆博李克强
汽车技术 2016年12期
解来卿罗禹贡刘成祺秦兆博李克强
(1.清华大学 汽车安全与节能国家重点实验室,北京 100084;2.中国定远汽车试验场,南京 210028)
基于CAN总线分析的增程式电动汽车控制策略研究
解来卿1,2罗禹贡1刘成祺1秦兆博1李克强1
(1.清华大学 汽车安全与节能国家重点实验室,北京 100084;2.中国定远汽车试验场,南京 210028)
针对增程式电动汽车控制策略解析的需要,提出了一套基于CAN总线分析的整车控制策略研究方法,该方法包含了数据采集系统搭建、典型工况设计、CAN总线协议破解和整车控制策略解析的全过程。将所提出方法应用于某先进增程式电动汽车的整车控制策略解析中,解析了该车的增程器控制策略、发动机起/停控制逻辑和工作模式切换控制策略,表明了该方法的有效性。
1 前言
增程式电动汽车是一种电驱动的插电式串联混合动力汽车,具备纯电动汽车节能、环保、结构简单的优点,同时又能够通过增程器(Auxiliary Power Unit,APU)延长续驶里程,是当前混合动力汽车发展的主要方向之一[1~3]。在增程式电动汽车控制技术开发与理论研究中,通常需要对某一先进车辆的增程器控制策略、起/停控制逻辑及能量管理策略等进行解析,以便于新产品控制策略开发过程中有效地借鉴、对比和改进设计。为确保控制策略解析的正确性,需要一套行之有效的解析方法。虽然基于实车道路试验的方法能够通过分析瞬时油耗初步判断车辆发动机的工作点数和停机逻辑[4],但难以确定其具体的发动机转速点及切换规律,也不能分析各转速点对应的增程器功率覆盖范围。
为此,本文根据增程式电动汽车的结构性能与控制策略特点,进行了基于转鼓试验的控制策略研究,提出了基于CAN总线信号分析的整车控制策略研究方法,并将该方法应用于某先进增程式电动汽车的控制策略解析中,研究了该车的整车控制策略。
2 研究方案
增程式电动汽车的整车控制策略是实现驾驶员意图和汽车性能的关键,同时也是搭建驾驶员意图与车辆性能表现的桥梁[5,6]。整车控制策略具体表现为汽车踏板输入与汽车动力总成输出变量之间的对应关系,研究它们在多种工况下的变化及数据相互关系可以解析整车的控制策略。基于此,本文设计了包括数据采集系统搭建、典型工况设计、CAN总线协议破解和整车控制策略解析在内的研究方案,如图1所示。

图1 整车控制策略解析研究方案
首先,搭建能够实时获取车辆踏板开度、CAN总线和OBD信息的数据采集系统,并设计能够覆盖各种模式下多种车速、加速度、减速度的典型行驶工况,在转鼓试验台上实时采集加速踏板、制动踏板、CAN总线和OBD中的相关数据;其次,基于增程式电动汽车动力总成数据特征与通信协议特征,借助转鼓试验台、CAN总线分析工具和故障诊断仪等,采用“识别-验证-标定-再验证”的方法破解该车的CAN总线部分通信协议,提取所需的动力总成和高压系统数据;最后,基于所采集的踏板开度及动力总成数据,采用数据统计、数学归纳的方法分析动力总成数据曲线特征及数据与工况对应关系,解析车辆的增程器控制策略、发动机起/停策略和整车工作模式切换策略。
3 数据采集系统搭建
针对某先进增程式电动轿车的结构与性能特点,搭建了能够实时采集汽车踏板开度、CAN总线数据和OBD中发动机数据的采集系统,主要包括转鼓试验台、踏板开度传感器、CAN分析工具、MicroAutoBox和计算机等,所搭建的数据采集系统硬件构成与连接关系见图2。

图2 数据采集系统硬件构成
图2中,OBD接口中发动机数据通过dSPACE发送查询命令获取,踏板传感器所采集的加速踏板和制动踏板开度信号经接口箱到MicroAutoBox后进行标定处理,处理后的发动机信号和踏板开度信号再由dSPACE发送至CAN端口,通过CANoe实时采集并显示。
4 CAN总线协议破解
4.1 CAN总线信号提取需求
为了能够正确解析整车控制策略,需要从CAN总线中提取驱动电机、发动机、发电机和高压电池的数据。综合考虑各部件的信号特点及在实际CAN总线数据分析过程中具体信号分析的难度,选择了需要提取的7组信号,如表1所列。

表1 CAN总线中提取的信号
4.2 CAN协议破解流程与方法
汽车CAN总线通信介质通常为双绞线,通过布线位置、外观特征和电压信号特征可以寻找出汽车CAN总线[7]。借助CANoe软件,能够实时采集并显示车辆运行时的CAN总线中传输数据ID及对应数据值。CAN总线协议破解流程见图3。
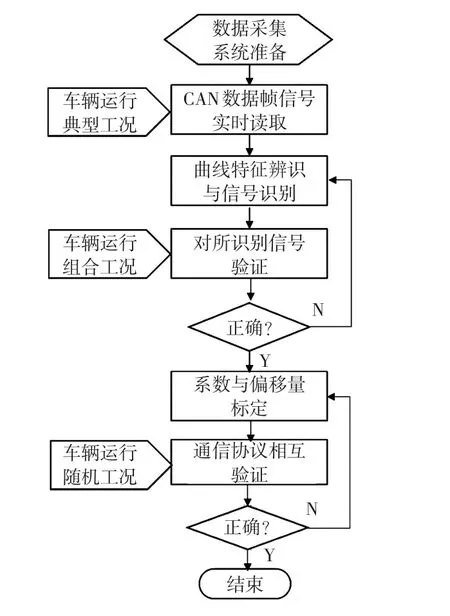
图3 CAN总线协议破解流程
在信号识别阶段,由于CAN总线中传输数据较多,需要基于CAN协议特征和所传数据特征识别所需要提取的信号,破解其协议。首先,根据动力总成信号的特征对CAN总线中传输数据进行筛选;其次,按照传输速率由高到低的顺序,分别建立各ID对应数据帧每个字节的协议文件;最后,车辆运行典型工况,并通过CANoe软件实时显示、保存数据帧曲线。为便于识别数据特征与规律,设计的典型工况除匀速、加速、减速工况外,还包括了先加速后减速的三角形工况和加速-匀速-减速的梯形工况。基于数据曲线特征以及数据与工况的对应关系来识别数据曲线表征的含义,基于典型工况识别出的动力总成信号将通过运行多种组合工况进行验证,以确保信号识别的正确性。
在信号标定阶段,借助转鼓试验台和测量仪表对验证后的信号进行标定,采用仪表实测值与CAN总线采样值拟合直线的方式标定协议的系数和偏移量。标定公式为:

式中,y为仪表实测值;x为CAN总线采样值;f为CAN协议系数;b为CAN协议偏移量。
以车速标定为例,拟合直线如图4所示,根据直线方程,f取整为0.016,b取整为0。其余信号的标定以此类推。

图4 车速信号标定拟合直线示例
为了确保标定误差在允许范围之内,运行多个随机工况进行相互验证。对于个别误差较大的数据,采用循环修正的方式进一步标定。
5 整车控制策略解析
5.1 增程器控制策略解析
基于多种工况下的发动机和发电机数据曲线特征,解析该车发动机转速点、转速切换规律、功率覆盖范围,进而归纳增程器的控制策略。
采用数据统计的方法分析了不同加速度工况下发动机转速曲线的分布特征,以确定发动机的怠速转速和工作转速。在转鼓试验台上分别以1 m/s2、1.5 m/s2、2 m/s2的加速度起步加速,得到图5所示的发动机转速随时间变化曲线。由图5a可看出,该车发动机起动后的怠速转速为2 200 r/min,工作转速为2 400 r/min;由图5b可看出,该工况下出现了2 400 r/min和3 500 r/min的工作转速;由图5c可看出,该工况下出现了2 400 r/min、4 300 r/min的工作转速。为寻找该车发动机其余转速并验证主要工作转速,在转鼓试验台运行了NEDC等循环工况,图5d为在NEDC循环工况中的一段发动机转速曲线,在该工况下出现了2 400 r/min、3 110 r/min、3 500 r/min和4 300 r/min等工作转速。经统计可知,该车发动机工作转速有2 400 r/min、3 110 r/min、3 500 r/min和4 300 r/min;其中,2 400 r/min是该车发动机的主要工作转速。
采用数学归纳方法分析不同加速工况下发动机转速曲线的变化特征,以归纳其转速切换规律。以图5b和图5c为例,当出现急加速等需求功率急剧增加时,发动机工作转速将根据需求功率大小从2 400 r/min直接调整至3 500 r/min或4 300 r/min;如图5d所示,当需求功率缓慢增加时,发动机工作转速将采用2 400 r/min→3 110 r/min→3 500 r/min递进调速。其中,2 400 r/min是发动机的主要工作转速。
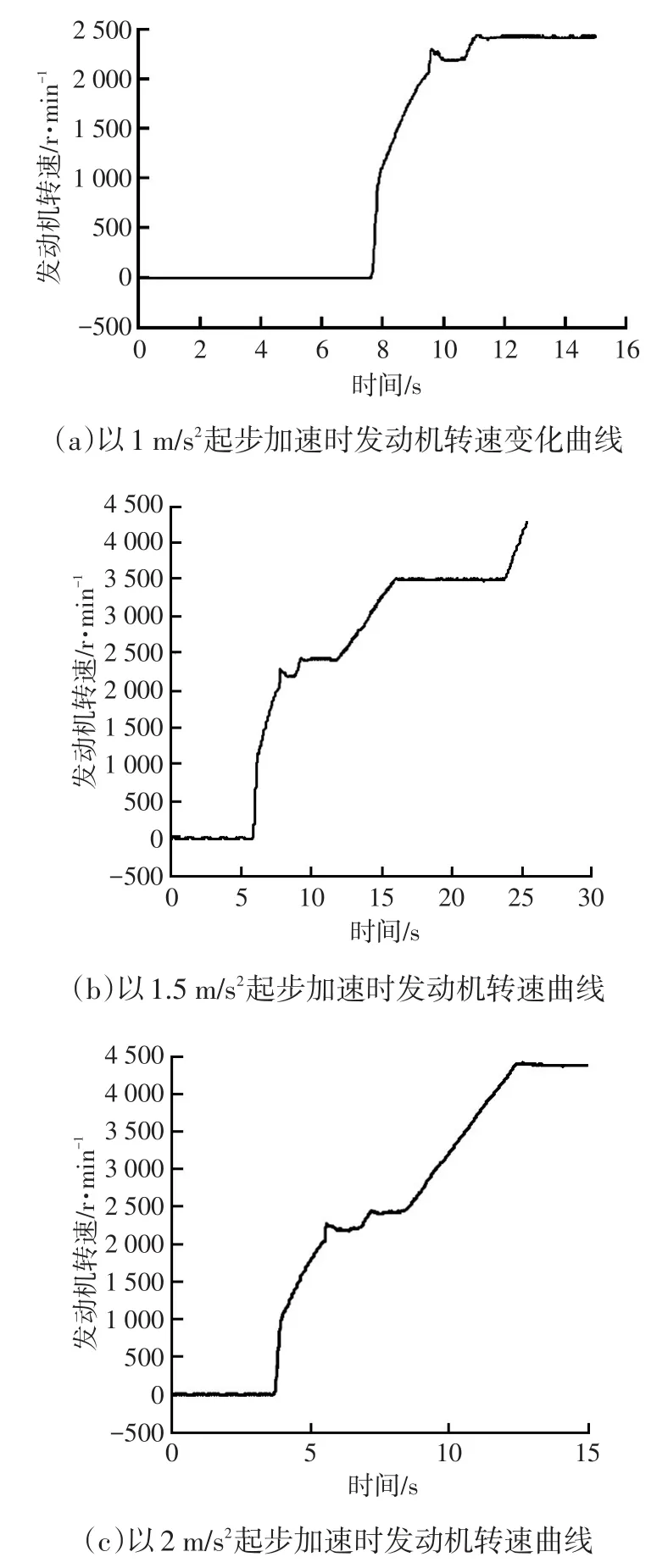

图5 发动机转速点分布及切换规律解析示例
通过以上分析可知,该车增程器控制策略属于功率跟随策略,根据发动机不同转速下增程器的电流、电压可计算出其功率分布及覆盖范围,结果如图6和表2所示。
根据分析结果可知,该车设定的发动机每个工作点覆盖的功率范围较大,进而避免了转速点的频繁切换现象。
5.2 发动机起/停控制逻辑解析
通过对该车在多种工况下发动机起动时刻的数据统计分析可知,该车具有低车速下的发动机起动控制逻辑及中等车速下的发动机起动控制逻辑,如图7所示。

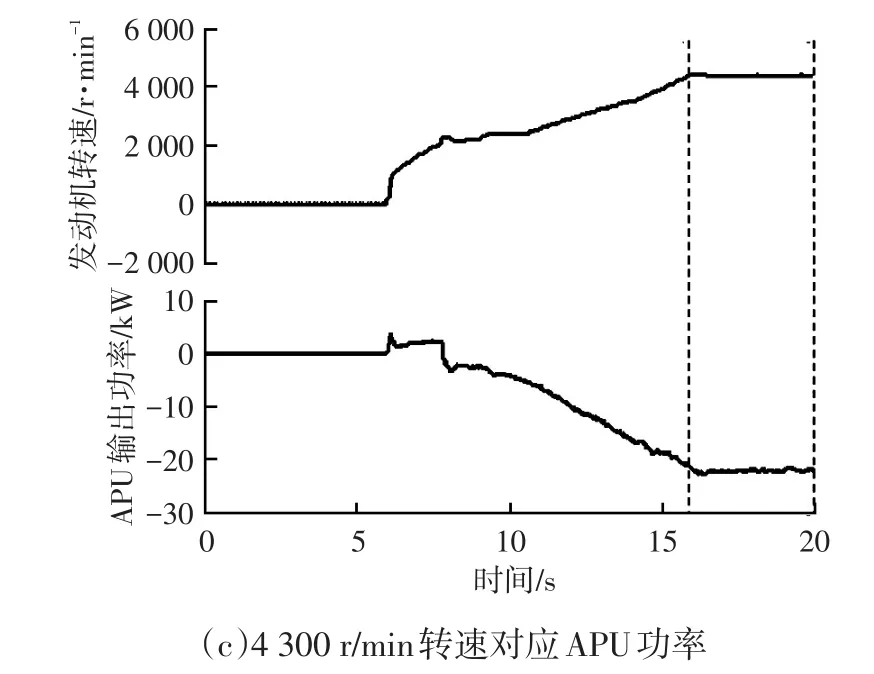
图6 增程器功率范围解析示例
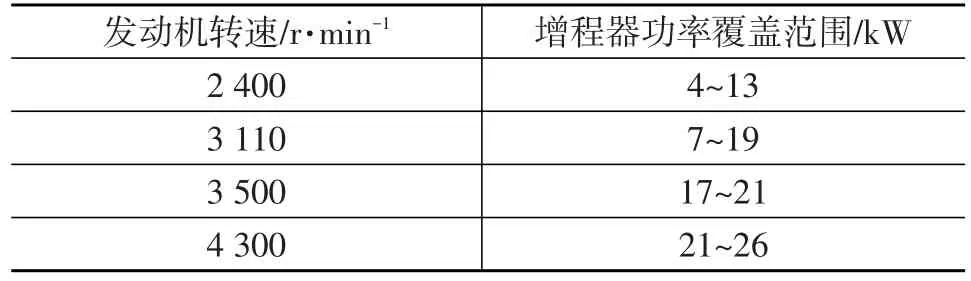
表2 各转速点对应的增程器功率范围

图7 发动机起动控制逻辑解析示例
由图7a可看出,在低速工况下,车辆缓慢加速运行到551 s时,电池放电能力不足以满足整车的功率需求,需要APU输出电流来辅助电池供电,因此控制器控制发动机在低车速下起动;由图7b可看出,在中速工况下,车辆以33.3 km/h速度匀速行驶,当运行到664 s时,电池放电到一定程度,电池剩余里程不足5 km,为避免电池剩余电量过低对电池的损害,控制器控制发动机起动。
对典型工况下该车发动机停机时电池剩余行驶里程、加速和制动踏板状态进行了分析,解析了发动机在停车、怠速下的停机逻辑,结果如图8所示。

图8 发动机停机控制逻辑解析示例
由图8a可看出,车辆运行到440 s时没有功率需求,此时发动机立刻断油停机,避免了不必要的燃油消耗。由图8b可看出,在418~424 s运行过程中,驾驶员有明显的停车意图,车辆并不需要输出动力,然而此时的电池电力过低,需要充电,导致出现发动机怠速不停机状态;而在车辆运行到424 s时,电池电量升高并达到一定值,当电池剩余行驶里程为4~6 km时,控制器控制发动机停机。
5.3 工作模式切换控制策略解析
增程式电动汽车工作模式包括通过电池输出电能的纯电模式和通过增程器输出电能的增程模式,整车的燃油经济性与模式切换控制策略密切相关[8]。经统计分析,该车在增程模式下出现了多次的纯电动模式与增程模式互相切换的现象。
5.3.1 纯电模式向增程模式的切换解析
图9为该车由纯电模式向增程模式的切换示例,由图9可看出,当车辆运行到507 s时,电动机开始输出动力,此时整车需求功率较小,电池的放电能力足够满足电动机需求,整车处于纯电动驱动模式;随着电池电量不断被消耗,当电池剩余行驶里程不足5 km时,电池放电能力减弱,电能已经无法满足电动机的功率需求,发动机起动,由增程器向电动机供电,车辆进入增程模式。

图9 纯电模式向增程模式的切换示例
5.3.2 增程模式向纯电模式的切换解析
图10为该车由增程模式向纯电模式的切换示例。由图10可看出,在初期阶段,车辆处于增程模式;在车辆运行到1 302 s时,整车由于制动能量回收,发电机向蓄电池充电;在车辆运行到1 309 s时,经过前段时间的充电,电池剩余行驶里程达到4~6 km以上,发动机停机,车辆切换为纯电模式行驶。

图10 增程模式向纯电模式的切换示例
6 结束语
本文以增程式电动汽车为研究对象,提出了基于CAN总线分析的整车控制策略研究方法,采用该方法对某先进增程式电动轿车的控制策略进行了解析,结果如下:
a.基于转鼓试验台和CAN总线分析工具所搭建的电动汽车数据采集系统,可实时获取驾驶员输入信息和关键动力总成数据;
b.所解析的某增程式电动汽车增程器控制策略为多工作点的功率跟随控制策略,发动机具有2 400 r/min、3 110 r/min、3 500 r/min、4 300 r/min等4个转速点,每个转速点对应功率覆盖范围较广;
c.该车的发动机起/停控制逻辑包含低车速下发动机起动逻辑、中等车速下发动机起动逻辑和停车停机、怠速停机等停机逻辑,行驶中根据驾驶员意图和电池剩余电量进行发动机的起/停控制,避免了电池剩余电量过低对电池的损害;
d.该车工作模式包含纯电模式和增程模式,行驶中根据整车功率需求和电池剩余电量进行工作模式切换的控制,从而保证了整车的节能性和排放性。
通过实车解析,证明了所提研究方法的有效性,同时探明了该先进车型的整车控制策略,为增程式电动汽车新产品控制策略的开发提供了借鉴。
1 周磊,罗禹贡,杨殿阁,等.混联式混合动力车多能源动力控制系统的开发.机械工程学报,2007,43(4):125~131.
2 闵海涛,叶冬金,于远彬.增程式电动汽车控制策略的优化.汽车工程,2014,36(8):899~903.
3 胡明寅,杨福源,欧阳明高,等.增程式电动车分布式控制系统的研究.汽车工程,2 012,34(3):197~202.
4 刘成祺,解来卿,樊月珍,等.某增程式电动汽车北方冬季工况下能耗测试与分析.汽车技术,2016(2):45~49.
5 Canova M,Guezennec Y,Yurkovich S.On the Control of En⁃gine Start/Stop Dynamics in a Hybrid Electric Vehicle.Jour⁃nal of Dynamic Systems Measurement&Control,2009a,131(6):636~650.
6 Li J Q,Zhou L,Zhou W,et al.A Control Strategy to Reduce Fuel Consumption of APU for Range-extended Electric Ve⁃hicle.EMEIT-12,2012.
7 王振坡,孙逢春,刘鹏.电动汽车原理与应用技术.北京:机械工业出版社,2014.
8 Niu J G,Pei F L,Zhou S,et al.Multi-Objective Optimiza⁃tion Study of Energy Management Strategy for Extended-Range Electric Vehicle.Advanced Materials Research, 2013,694~697:2704~2709.
(责任编辑文 楫)
修改稿收到日期为2016年7月11日。
Research on the Control Strategies for Range Extended Electric Vehicle Based on CAN Bus Analysis
Xie Laiqing1,2,Luo Yugong1,Liu Chengqi1,Qin Zhaobo1,Li Keqiang1
(1.State Key Laboratory of Automotive Safety and Energy,Tsinghua University,Beijing 100084;2.Dingyuan Automotive Proving Ground,Nanjing 210028)
In order to meet the need of studying the control strategies for range extended electric vehicle,an analysis method of control strategies based on CAN bus analysis was presented,which included data acquision system decoding, typical driving condition design,the total process of CAN bus protocol extraction and vehicle control strategy analysis.This method was applied to an range extended electric vehicle to analyze control strategy of range extender,engine start-stop control logic and mode change,indicating validity of this method.
Range extended electric vehicle,Chassis dynamometer Test,CAN bus,Control strategy
程式电动汽车 转鼓试验 CAN总线 控制策略
U467.1
A
1000-3703(2016)12-0020-06
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
网络安全与数据管理(2022年2期)2022-05-23
汽车实用技术(2022年7期)2022-04-20
汽车工程师(2021年11期)2021-12-21
北京第二外国语学院学报(2021年2期)2021-08-13
科学家(2021年24期)2021-04-25
防爆电机(2021年1期)2021-03-29
