
中国月球探测器的成就与展望
2017-01-18 06:14叶培建于登云孙泽洲申振荣
深空探测学报 2016年4期
叶培建,于登云,孙泽洲,申振荣
(1.中国空间技术研究院,北京 100094;2.中国航天科技集团公司,北京 100048;3.北京空间飞行器总体设计部,北京 100094)
中国月球探测器的成就与展望
叶培建1,于登云2,孙泽洲3,申振荣3
(1.中国空间技术研究院,北京 100094;2.中国航天科技集团公司,北京 100048;3.北京空间飞行器总体设计部,北京 100094)
全面而简要地回顾了国内外月球探测的发展历程,介绍了中国月球探测器的工程研制和飞行任务实施情况,总结了中国月球探测器取得的技术成就和科学成果,展望了中国月球探测器的未来发展。
月球探测;月球探测器;技术成就;展望
0 引 言
月球是距离地球最近的天体,以其独特的空间位置、广阔的科学探索前景,成为人类地外天体探测和资源利用的首选目标。20世纪50—70年代中期,美国和苏联开展了一场以月球探测为中心的空间技术竞赛,形成了第1次探月高潮,分别实现了载人登月和无人月球采样返回。从1994年持续至今的第2次探月高潮中,欧空局、日本、中国和印度等加入了月球探测行列,月球再次成为深空探测的热点[1]。截至2016年,全球共实施月球探测任务114次。目前,有5个月球探测器处于工作运行状态,包括美国的月球勘察轨道器、空间环境探测器(双星)和我国的“嫦娥3号”着陆器、“嫦娥5号”飞行试验器服务舱。
自古以来,中华民族对月球寄予了无限的遐思和美好的梦想。2000年11月颁布的《中国的航天》白皮书,提出了我国“开展以月球探测为主的深空探测”的发展目标。2006年2月颁布的《国家中长期科学和技术发展规划纲要》(2006—2020年),明确将“载人航天与探月工程”列入“16个重大专项”。2006年10月颁布的《中国的航天》白皮书,提出了“实现绕月探测,突破月球探测基本技术,研制和发射中国第一颗月球探测卫星‘嫦娥1号’,主要进行月球科学探测和月球资源的探测研究;开展月球探测工程的后期工作”的任务目标。目前,我国已经成功实施了“嫦娥1号、2号、3号”月球探测任务及“嫦娥5号”飞行试验器任务,圆满完成探月工程一期“绕”和二期“落”的任务,具备了月球到达、月面着陆的基本能力[2]。2017年,将择机实施“嫦娥5号”任务,完成探月工程三期“回”的任务,具备月地返回的基本能力,最终全面实现探月工程“绕、落、回”三步走战略目标。2018年,将择机实施“嫦娥4号”任务,完成月球背面软着陆、巡视以及地月拉格朗日L2点中继通信任务,这将标志着中国将持续开展月球探测,不断深化月球科学研究和新技术验证,逐步实现空间技术向空间科学和空间应用拓展。
2004年“嫦娥1号”任务进入工程研制至今,经过十多年的努力,中国探月工程四战四捷,获得了大量科学成果,航天各大系统掌握了月球探测的基本技术,建立了较为完善的研究、设计、开发、验证和应用体系,培养和锻炼了一支思想过硬、技术精湛的人才队伍,具备了月球探测之到达、着陆的基本能力。探测器系统作为探月工程的重要组成部分,在继承我国近地卫星已有成功经验和技术基础上,勇于创新、集智攻关,研制出了中国第一颗月球探测卫星、第一个飞入行星际的探测器、第一个软着陆在地外天体表面的航天器和第一辆将“足迹”刻在地外天体上的月球车、第一个以近第二宇宙速度高速再入返回地球的航天器,不仅丰富了我国航天器的种类,并且为我国迈向更远的深空奠定了技术基础。
1 中国月球探测器概况
1.1 “嫦娥1号”卫星
“嫦娥1号”(如图 1所示)是中国第一颗月球探测卫星[3-4],同时也是中国第一颗对地球以外天体进行环绕遥感探测的航天器,树立了我国航天事业发展史上继人造地球卫星、载人航天飞行之后的第三个里程碑。“嫦娥1号”卫星的发射质量与干重比、载荷与干重比、能源系统和工作寿命等指标都达到了国际同类水平,其表现出的制导导航与控制的能力和精度、无深空大天线支持条件下远距离的测控精度、热控能力等具有国际先进水平。“嫦娥1号”卫星发射质量约2 350 km;对月指向姿态控制精度优于1°,姿态控制稳定度优于0.01°/s,对地数据传输速率为3 Mbps。
2004年1月,“嫦娥1号”卫星进入工程研制。“嫦娥1号”卫星的使命是走向一个我国的航天器从未到达过的领域并完成预定任务,工程研制面临一系列挑战和难题。研制队伍充分利用我国应用卫星研制成功经验和技术成果,最大限度地采用经过飞行试验验证的地球卫星各分系统的硬件和软件,对于绕月探测任务不同于地球卫星、载人飞船的技术特点,如轨道、测控、制导导航与控制、温度控制等,进行了创新设计和技术攻关。提出了基于轨道调相、最小能量和多次制动的轨道方案,设计了转移飞行复杂姿态轨道控制、地外天体捕获制动、地外天体探测中多天体指向控制的系统,研制了我国深空探测首个星载远距离测控通信系统,建立了国内首个月球表面温度场分布模型,突破了地球、月球和太阳等多天体引力影响下的轨道设计,适应复杂变轨、高精度高自主三体指向控制的制导导航与控制,地月约40万 km测控通信,太阳辐射、月面反射、月食、月影等各种复杂外热流条件下热控等关键技术。
2007年10月24日,“嫦娥1号”卫星在西昌卫星发射中心由“长征3号甲”火箭成功发射。2009年3月1日,在完成全部预定任务后,“嫦娥1号”卫星受控撞击在月球的丰富海区域。首次探月工程的圆满完成,使我国跨入世界上为数不多的具有深空探测能力的国家行列。“嫦娥1号”突破了至地外天体的飞行技术,实现了首次绕月飞行,获取了以“首幅全月球影像图”为代表的一系列科学探测成果,树立了我国航天事业的第三个里程碑。“嫦娥1号”卫星实现了我国航天器从环绕地球的轨道(距地约6万 km)到环绕月球的轨道(距地约40万 km)的跨越,标志着中国的航天器具备了对地外天体进行全球遥感探测的能力。
1.2 “嫦娥2号”卫星
“嫦娥2号”卫星(如图 2所示)是中国第一颗飞入行星际的探测器[5],同时也是我国第一颗运行在日地拉格朗日L2点开展空间探测的航天器。“嫦娥2号”卫星发射质量约2 480 kg;对月指向姿态控制精度优于1°,姿态控制稳定度优于0.005°/s,对地数据传输速率为6 Mbps。
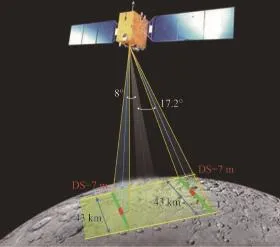
图2 “嫦娥2号”卫星对月高分辨率成像示意图Fig.2 Sketch of high resolution image facing to lunar surface of the Chang’e-2 probe
2008年10月,“嫦娥2号”卫星进入工程研制。研制队伍针对“嫦娥2号”卫星以“嫦娥1号”备份星为基础的任务特点,对平台各分系统进行了适应性设计,重点对技术验证项目开展攻关,突破了地月直接转移轨道设计、高灵敏度X频段深空应答机、地外空间高精度延时积分成像等关键技术。
2010年10月1日,“嫦娥2号”卫星在西昌卫星发射中心由“长征3号丙”火箭成功发射。2011年4月,完成了预定的技术验证和科学探测任务。2011年8月,从绕月轨道出发至日地拉格朗日L2点附近并开展空间探测;2012年12月,从日地拉格朗日L2点转移并飞越图塔蒂斯(Toutatis)小行星。目前,成为太阳系的一颗人造小行星,运行在日心轨道上。“嫦娥2号”卫星完成了深空X频段测控体制、低密度奇偶校验编码(LDPC)等技术在轨验证,获取了以“7 m分辨率全月球影像”数据为代表的一大批科学成果,特别是通过一次任务实现了月球观测、日地拉格朗日L2点空间探测、图塔蒂斯小行星飞越探测,标志着中国的航天器初步具备了开展深空多目标、多任务探测的能力。
1.3 “嫦娥3号”探测器
“嫦娥3号”探测器由着陆器(图 3a)和巡视器(图 3b,即“玉兔号”月球车)组成[6],着陆器是中国第1个软着陆在地外天体表面的航天器,巡视器是中国第1辆将“足迹”刻在地外天体上的月球车。截至2016年7月,“嫦娥3号”着陆器已在月面工作了33个昼夜,再次刷新了国际上探测器月面工作时间最长的纪录。尽管“玉兔”后来不能行走,但她始终可以正常休眠和被唤醒,并带病完成了不少科学任务。“嫦娥3号”探测器发射质量约3 780 kg,着陆器干重约1 220 kg,着陆月面时三轴角速度控制误差优于1°/s,着陆精度优于5 km;巡视器质量约140 kg,适应月面最大坡度20°,最大移动速度200 m/h。

图3 “嫦娥3号”着陆器和巡视器月面互拍图Fig.3 Chang’e-3 lander and rover imaging each other on Moon
2008年3月,“嫦娥3号”探测器进入工程研制。着陆器和巡视器均为全新的航天器,新技术和新产品的比例高达80%。研制队伍瞄准当今航天器技术发展水平,高起点地确定探测器的功能与性能指标,按照任务剖面开展关键环节设计与地面仿真和试验验证,创新提出了路径优、燃料省、精度高的着陆全自主导航控制策略和基于多信息融合的自主接力障碍识别与避障算法,基于全运动学关系驱动转向协调控制、离散激光点辅助双目视觉探测避障算法和基于多源图像信息融合的逐级递进式巡视遥操作系统;研制了大变比流量调节、自适应调节喷注的变推力发动机,悬臂式着陆缓冲机构和缓冲超塑性吸能新材料,适应月面复杂地形和极端承载特性的六轮摇臂悬架式移动装置;在国际上首次提出并研制了基于同位素热源的低重力驱动两相流体回路,创新设计了综合光照、温度、能源和测控等多约束条件下的月夜全断电休眠和月昼自主唤醒策略,突破了月球着陆器和巡视器总体设计,月面着陆自主导航与控制、复杂变推力推进系统和大承载着陆缓冲,月面巡视自主导航控制与遥操作、月面移动,月夜极低温度环境生存和月昼光照自主唤醒等关键技术。
2013年12月2日,“嫦娥3号”探测器在西昌卫星发射中心由“长征3号乙”火箭成功发射。12月14日,自主控制软着陆在月球虹湾以东区域。12月15日,着陆器与巡视器成功进行互拍。“嫦娥3号”任务圆满成功,为我国航天事业发展树立了新的里程碑,在人类攀登科技高峰征程中刷新了中国高度。“嫦娥3号”探测器首次实现了我国航天器在地外天体的软着陆和巡视勘察,获得了国际首幅月球地质剖面图、月球外逸层水含量、地球等离子体层边界在磁层亚暴的影响下发生凸起等科学成果,标志着中国的航天器具备了到达无大气地外天体表面并开展就位探测的能力。
1.4 “嫦娥5号”飞行试验器
“嫦娥5号”飞行试验器(如图 4所示)由返回器和服务舱组成[7],返回器是中国第一个以近第二宇宙速度高速再入返回地球的航天器,服务舱选择“嫦娥2号”卫星平台并进行了适应性改进设计,构建了双平台飞行器系统。飞行试验器发射质量约2 450 kg,返回器质量约330 kg,再入速度约11 km/s。
2011年1月,“嫦娥5号”飞行试验器进入工程研制。研制队伍根据模拟“嫦娥5号”任务飞行过程和返回再入条件,验证与半弹道式返回再入的相关技术的任务要求,设计了适用于高速再入返回的气动外形,提出了基于数值模拟流场修正的气动辐射加热算法模型,新建了高能脉冲风洞、高焓膨胀管风洞,超声速电弧风洞和跨超/高超声速气动力试验系统;新研了低密度的大底大面积烧蚀材料,建立了碳硅复合材料在高焓两次加热环境下的烧蚀模型;提出了全系数自适应双环纵向与射向预偏置横向制导方法、再入剖面在线实时规划评估方法;突破了高速再入返回气动设计与验证、高速两次再入大气层热防护、半弹道跳跃式高速再入返回自主制导导航与控制等关键技术。

图4 “嫦娥5号”飞行试验器飞行状态示意图Fig.4 Sketch of flight state of the Chang’e-5 flight test probe
2014年10月24日,“嫦娥5号”飞行试验器在西昌卫星发射中心由“长征3号丙”火箭成功发射。11月1日,返回器安全着陆在预定的四子王旗着陆场,落点精度优于3 km。再入返回飞行试验取得圆满成功,为探月三期“嫦娥5号”采样返回任务的实施奠定了坚实的基础。“嫦娥5号”飞行试验器实现了我国航天器从近地轨道返回再入(第一宇宙速度)到从地外天体返回再入(第二宇宙速度)的跨越,标志着中国的航天器具备以第二宇宙速度高精度再入地球大气并安全返回地面的能力。
1.5 “嫦娥5号”探测器
“嫦娥5号”探测器(如图 5所示)由轨道器、着陆器、上升器、返回器4器组成,任务目标为采集2 kg月球样品返回地球。
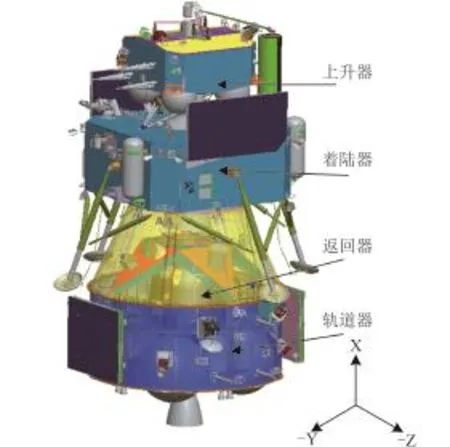
图5 “嫦娥5号”探测器发射状态构形示意图Fig.5 Sketch of launching state of the Chang’e-5 probe
2011年1月,“嫦娥5号”探测器进入工程研制。研制队伍积极借鉴返回式卫星和载人飞船的成功经验,充分继承探月工程已有技术基础和成熟产品,针对组合体工作模式复杂、技术难度大、资源约束苛刻的问题,强化了系统集成和功能复用,强化了飞行过程关键环节设计与验证,已经完成了采样封装、全尺寸羽流导流、着陆起飞、交会对接及样品转移等关键技术的地面验证。目前,“嫦娥5号”探测器研制工作整体进展顺利,预计将于2017年下半年择机发射。“嫦娥5号”任务的顺利实施,将突破月表自动采样、样品封装与保存、月面动力上升、采样返回轨道设计、月球轨道交会对接等关键技术,标志着中国的航天器具备了往返地外天体的能力。
1.6 “嫦娥4号”探测器
“嫦娥4号”探测器(如图 6所示)由着陆器、巡视器和中继星组成。中继星、着巡组合体的分别发射,将实现人类航天器首次软着陆于月球背面,并首次开展地月拉格朗日L2点中继通信。
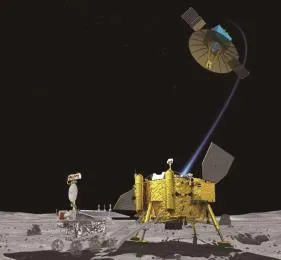
图6 “嫦娥4号”探测器月球背面工作示意图Fig.6 Sketch of working state on the lunar far side of the Chang’e-4 probe
2015年11月,“嫦娥4号”探测器进入工程研制。着陆器、巡视器在继承“嫦娥3号”技术基础上,充分利用已投产的“嫦娥3号”备份产品,并进行适应性修改;中继星采用CAST100平台,并借鉴探月工程已有成果,针对地月拉格朗日L2点中继任务进行适应性设计。目前,“嫦娥4号”探测器研制工作已全面展开,着陆器和巡视器完成了技术状态梳理和初步设计工作,中继星完成了方案设计工作。根据任务安排,“嫦娥4号”中继星预计于2018年上半年择机发射,着巡组合体在中继星完成在轨测试后于2018年下半年择机发射。“嫦娥4号”任务的顺利实施,将突破地月拉格朗日L2点轨道精确设计、复杂地形环境条件下的安全着陆、同位素供电与月夜工作等关键技术,标志着中国的航天器初步具备全月面到达和全周期工作的能力。
2 中国月球探测器取得的成就
2.1 取得的工程技术成就
中国探月工程实施以来,在探测器研制过程中取得了大量拥有自主知识产权的高水平技术成果,推动了月球探测器总体设计、轨道设计、制导导航与控制、推进、热控与能源、测控通信、轻小型机构、返回再入气动与防热技术、地面试验验证等工程技术的进步。
1)月球探测器总体设计技术
在“嫦娥1号”卫星总体设计中,考虑到任务飞行距离远和环绕遥感探测的特点[8],卫星总体设计充分借鉴变轨能力强的“东方红3号”平台的推进和结构技术,以及自主能力强的“资源系列”遥感探测卫星平台相关技术,进行了集成设计和创新设计。在GNC、有效载荷和数管分系统之间设立重要数据保存与恢复机制,设计多种整星安全工作模式,提高了卫星在轨生存能力;设置全向、定向天线双通道链路,提高了卫星环月期间下行链路的可靠性;综合卫星轨道特性、有效载荷成像高度角约束与太阳电池阵对日跟踪限制的情况,设置卫星正飞和侧飞姿态;合理调配卫星推进剂携带量与整星重量、优化卫星冗余及可靠性的关系,调配整星能源与卫星温控的矛盾,最终达到了全系统和全性能最优。
在“嫦娥2号”卫星总体设计中,继承了“嫦娥1号”的平台构架和分系统[9],在轨道机动、测控编码和数传码速率等方面均提升了平台能力;针对技术验证任务需求,更换和改进了科学载荷,并对轨道方案、飞行程序、热设计等进行了系统设计。
“嫦娥3号”探测器为全新航天器,在继承绕月探测已有技术基础上,创新设计了地外天体表面软着陆和巡视探测航天器的总体方案。针对月球表面软着陆[10],开发了月面软着陆仿真系统,制定了着陆安全的定量评估方法,提出地外天体不确定地形环境下基于拉丁超立方抽样方法的快速着陆安全概率计算方法;针对月面巡视,提出了适合全月面地形的寻找过夜休眠点的移动控制策略,建立了以轮壤接触为特征的巡视器系统性能仿真和移动性能量化评价体系。
“嫦娥5号”飞行试验器总体设计紧紧围绕飞行验证的任务目标,构建了双平台(服务舱和返回器)飞行器系统,提出了变结构总线、多体制数据系统融合的设计方法,解决了两舱数据系统间信息交互以及器-地信息传输的难题;提出了适用于高速再入返回的气动外形方案,并进行功能综合、机电热一体化设计,解决了返回器“重量轻、体积小”这一要求所带来的技术难题。
此外,总体设计过程的核心在于综合,综合的关键在于建模。针对历次任务的新环境,探测器系统建立了月球引力场模型、月球红外模型、月球表面温度场分布模型、月表地形地貌模型、月壤物理特性模型、月尘模型、月表电磁波传输模型、发动机羽流与月面相互作用模型,并集成当今计算机、智能控制、信息通讯等技术,构建了我国首个针对多任务目标、多探测方式和全任务周期的月球探测任务系统仿真设计分析和支持平台,在设计阶段开展仿真验证,在任务实施前进行飞行过程预示,在任务实施时对飞行数据进行分析,为保证方案的正确性和执行过程无差错提供了高效手段。
可以看出,随着月球探测工程的顺利实施,我国研制的月球探测器已经涵盖了绕月探测器、着陆器、巡视器和返回器4类,形成了一整套探测器总体设计的规范和方法,建立了任务仿真分析系统和专业分析模型,技术水平已达到国际先进。
2)月球探测轨道设计技术
月球探测所面临的轨道设计问题已经无法用传统的二体问题理论解决,需要考虑地球和月球引力的影响,对地球、月球和探测器的三体问题进行分析求解,并且综合考虑地月相对位置、测控覆盖范围、运载发射条件、燃料携带量、月影分布和月食时机等各种约束条件,来对轨道进行设计和参数优化。
“嫦娥1号”卫星设计了调相轨道进入地月转移、多次减速制动进入绕月轨道的方案[11],有效地将每月1 d的发射机会扩大到每月3 d,实现了卫星10余次变轨时地面测控站及测量船的布点位置一致的要求,同时还保证了速度增量需求最小。“嫦娥1号”卫星轨道设计建立了以三体问题为基础的轨道设计精确数值方法及模型,开创性地应用轨道拼接技术,解决了摄动影响下的调相和地月转移轨道拼接问题。
“嫦娥2号”卫星基于运载火箭滑行时间可调设计了直接地月转移轨道[12],将地月转移时间由“嫦娥1号”的12 d缩短为不到5 d;基于拟冻结轨道理论设计了可长期稳定保持的环月轨道,将轨道高度由“嫦娥1号”的200 km降低为长期运行的100 km和对虹湾成像时的15 km。在完成预定任务后,设计了日地拉格朗日L2点轨道,国际上首次实现从月球轨道飞赴日地拉格朗日L2点。利用拉格朗日点伴地绕日特性,设计了小行星交会轨道,通过遍历搜索和微分修正相结合的方法,解决了最优出发能量的快速高精度求解轨道问题。
“嫦娥3号”探测器针对着陆在月面特定区域的轨道设计任务要求,提出了动力下降初始点确定方法,建立了适合于着陆任务的多约束条件下的倒推式、分段拼接轨道设计方法。
“嫦娥5号”飞行试验器设计了能量最优绕月自由返回和地月拉格朗日L2点轨道方案,解决了降轨发射、升轨返回,高速再入分离点设计和再入走廊设计等难题,突破了大倾角变轨道借力飞行、地月拉格朗日L2点轨道的低能转移轨道设计技术。
可以看出,已掌握了探测器系统多约束条件下的地球、月球和探测器三体的轨道设计技术,积累了不同发射轨道或出发条件以最小能量进入不同目标轨道(环月轨道、日地拉格朗日L2点轨道、地月拉格朗日L2点轨道、小行星交会轨道)的工程设计经验和理论方法。这些经验和方法可以直接应用到后续的月球探测任务中,并为行星探测任务轨道设计奠定技术基础。
3)制导导航与控制技术
“嫦娥1号”卫星突破了适应复杂变轨、高精度高自主三体指向控制的制导导航与控制技术[13]。研制了紫外月球敏感器、双轴驱动机构,建立了我国首个适应复杂变轨、高精度、高自主三体指向控制的制导导航与控制系统体系结构,采用了全方位自主变轨控制系统设计,实现了变轨全过程星上自主控制。
“嫦娥2号”卫星继承了“嫦娥1号”卫星制导导航与控制系统,增加了自主惯性对准功能,解决了卫星在太阳定向模式下的惯性快速对准问题,提高了轨道控制自主性;新增的大推力轨道维持功能,提高了自主轨道机动能力。
对于“嫦娥3号”着陆器的制导导航与控制系统,创新设计了基于惯性导航配以外部测距测速信息修正的自主导航和自主式、高精度分段减速悬停式着陆控制方案[14],研制了微波测速测距、激光测距、激光三维成像和光学成像等新型敏感器,开发了基于光学图像和三维高程数据自主接力避障控制算法,实现了路径优、燃料省、误差小、避障能力强的全自主避障软着陆控制。“嫦娥3号”巡视器制导导航与控制系统的设计,突破了月面非规划环境自主导航控制技术,提出了多种适应月面地形特征的启发式路径搜索算法、基于立体视觉的局部自主避障算法和协调运动控制算法,攻克了松软环境下的滑移、滑转等难题,实现了巡视器自主局部路径规划与避障。
“嫦娥5号”飞行试验器制导导航与控制系统攻克了由全目标、预偏置和降阶策略组成的自由返回轨道中途修正策略和轮控姿态管理、喷气管理和高精度加速度计闭环轨控的组合技术,解决了再入走廊控制精度要求高、姿控喷气对再入角误差影响严重、轮控调姿速度慢等问题,实现了半弹道跳跃式再入返回。
可以看出,随着我国月球探测工程的实施,月球探测器制导导航与控制技术也有了跨越式发展,提出了大量控制算法和模型,设计了满足于不同任务要求的系统,研制了多种新型敏感器和执行机构,探测器系统在高精度、高可靠和自主性等方面不断增强。
4)推进技术
“嫦娥1号”卫星、“嫦娥2号”卫星和“嫦娥5号”飞行试验器的推进系统均有较好的继承性,贮箱、发动机、管路、阀门等产品配置基本相同,所不同的是根据选用的运载火箭的发射能力不同,携带的推进剂有所不同,体现出来的轨道机动能力有所差别。
“嫦娥3号”着陆器需要完成月球软着陆任务,月球表面无大气,无法利用大气减速,需靠着陆器的推进系统减小约1.7 km/s的速度,为保证着陆过程可控,还需探测器的推力可调,对推进系统的设计提出了很高的要求。针对着陆过程中工作模式复杂、推力突变范围大、推力精度要求高等严酷条件,通过系统流阻匹配、防晃防旋、系统减压调节等针对性设计,解决了系统并联均衡排放、液体晃动、大流量变工况下系统稳定工作等一系列难题;自主研制出我国第1台航天器用高比冲、高控制精度的变推力发动机,利用针栓式流量调节装置分别对氧路、燃路和冷却路的流量进行精确控制,实现推力连续可变。另外,大变比流量调节、自适应调节喷注器、大直径薄壁喷管旋压等突破性技术,对我国液体火箭发动机及相关技术的发展起到了很大的带动作用。
可以看出,月球探测器的研制将进一步牵引推进技术发展和新产品研发,化学推进、双组元轨控发动机比冲的提高、电推进以及高效推进系统的应用将是后续发展的重点。
5)热控与能源技术
“嫦娥1号”卫星创建了月球表面温度场分布模型,采用变红外热流分析技术,解决了飞行过程月面的太阳反照、红外辐照等外热流条件复杂的难题,突破了适应月球环绕宽飞行包络的复杂热控技术。针对月食,进行了热控和供配电系统的精确设计,合理调整飞行程序,最大限度地平衡能源,并对关键环节进行了专项试验验证。“嫦娥2号”卫星和“嫦娥5号”飞行试验器全面继承了“嫦娥1号”卫星的热设计和供配电设计方法,并根据任务特点和技术状态变化进行了局部适应性设计。
“嫦娥3号”探测器工作在月球表面,除发射、地月转移、绕月飞行等过程经历的热环境可以借鉴“嫦娥1号”卫星热设计的成功经验外,还必须针对月面复杂环境开展针对性设计。针对长达14 d的-180℃极低温月夜环境,突破了1/6 g低重力辅助两相流体回路设计与验证技术,以及涉核产品在航天严酷环境条件下的测试、试验技术,保证了基于同位素热源和氨为工质的热量的有效导入和充分利用,实现了热能的自主可控传输和仪器设备在极低温环境下的月夜生存。创新设计了光照唤醒电路和唤醒程序,提出了探测器断电休眠、光照自主唤醒的月面休眠唤醒策略,通过自主感知太阳光照,实现着陆器和巡视器的可靠自主唤醒。
可以看出,随着月球探测任务的进一步复杂化,新型能源和新型热控技术研究十分必要,并且需要将能源技术与热控技术很好地结合,在最小的资源代价下为探测器提供最优的能源保障和温度保障。
6)测控通信技术
“嫦娥1号”卫星基于当时国内地面站的能力,采用信道编码技术提高卫星下行遥测信道的抗干扰能力,运用多维遥测下行组合技术提高了遥测通道利用率,采用高灵敏度接收技术和单元天线优化设计技术,突破了星载远距离测控通信技术,解决了首次月球探测的远距离测控问题。
“嫦娥2号”卫星测控通信系统在继承“嫦娥1号”的基础上,针对X频段体制验证任务要求,提出了新型分块相干累积的频谱估计算法,解决了超低信噪比下的信号捕获难题;采用了数字处理的测距音转发幅度自适应控制技术,解决了全电平下测距音调制度动态范围大难题;研制了星载高灵敏度X频段应答机并完成了在轨验证,实现了我国航天测控由S频段向X频段的技术跨越。此外,“嫦娥2号”卫星在距地约700万 km以远的空间将拍摄到的小行星图像传回地面,标志着我国航天器测控通信距离达到了一个新高度。
“嫦娥3号”探测器正式将X频段作为任务频段,在月球探测正式任务中首次进行了X频段统一载波测控体制的设计与实施。此外,设计了器间UHF通信系统,首次实现了两个航天器在地外天体表面的数据传输。
可以看出,我国的月球探测器不仅具备地月约40万 km测控通信的能力,还具备根据任务要求进一步扩展的能力,高码速率、高灵敏度、抗干扰、轻小型化将是未来测控通信系统的发展方向。
7)轻小型机构技术
“嫦娥1号”卫星根据任务需要研制了大角度机械扫描定向天线,攻关解决了双轴驱动机构设计以及三自由度二维运动系统的装调测试和试验问题。
“嫦娥3号”探测器系统资源有限,对空间和重量要求非常苛刻,在机构研制过程中采取了大量优化设计和减重措施。针对着陆缓冲,创新设计了“悬臂式”构型、集成式压紧释放/展开锁定装置、主辅配合缓冲机构,突破了高延伸率拉杆材料的制备、加工及表面处理工艺等关键技术,研制了延伸率超过70%的新型常温超塑性材料,解决了着陆缓冲、着陆稳定性等关键问题。针对月面移动,开展了车轮外形参数以及棘爪分布优化、驱动和转向机构壳体一体化设计,研制了可适应各种月表环境的六轮全驱、四轮转向、筛网式车轮的轻小型化移动装置。此外,还通过选用轻质材料(例如镁合金)、轻质小型电连接器、轻小型轴承/电机和谐波减速器,以及机构功能复用等措施,进一步实现了机构的轻小型化。
可以看出,随着任务功能要求的增多,探测器系统机构变得越来越复杂,一方面推动了新材料和新工艺的产生,另一方面对机构集成化设计提出了更高要求,需要设计人员转变设计思想,从粗放式设计转变为精细化设计,真正做到裕度合理、工作可靠。
8)返回再入气动与防热技术
“嫦娥5号”飞行试验器的返回器以半弹道跳跃式再入返回地球,验证了返回器气动外形和轻质防热系统,突破了高速再入返回气动设计、分析与验证技术和以第二宇宙速度两次再入大气的热防护技术,全面提升了我国对高速条件下高空稀薄大气的气动力、气动热、热防护等技术机理的认识水平,提高了高空稀薄大气条件下高速再入过程数学和物理模型的精度,积累了高空大气中高速飞行的工程经验,带动了新材料的研制和航天装备设计方法的创新。此外,高速返回再入气动与防热技术可以为火星、小行星等天体的采样返回任务提供参考和借鉴。
9)月球探测器地面试验技术
在月球探测器工程研制中,尽量真实模拟探测器经历的力、热以及空间环境,对探测器开展充分的地面试验验证,是确保任务成功的重要环节和重要保证。
在“嫦娥1号”卫星任务中,针对月球轨道特殊热环境,开展了模拟月球红外热流下的热试验,并完成了月食专项试验,验证了热设计和过月食设计的正确性。
在“嫦娥3号”探测器任务中,针对着陆、巡视任务过程以及月面复杂环境,开展了多项专项试验。采用低重力模拟、月面反射特性模拟、月壤模拟、二维快速随动、光学和激光的高精度测量等技术,构建了国内首个悬停避障试验场、着陆试验场、巡视器内场和外场、2万 N发动机高模试车台等试验设施,创造性地提出了一系列针对软着陆和巡视探测的试验方案和试验方法[15],其中系统级专项试验包括6项:以验证制导导航与控制分系统和推进分系统的协调工作能力为目的的悬停避障缓速下降试验;以考察着陆速度、着陆姿态对着陆稳定性影响为目的的着陆稳定性试验;以验证着陆器主结构在典型工况下抗冲击性能为目的的着陆冲击试验;以测试典型月面地形下巡视器移动性能为目的的组合面试验;以测试巡视器移动性能、导航控制性能为目的的内场试验;以验证巡视器遥操作协同工作程序为目的沙漠外场试验等。
此外,在“嫦娥5号”飞行试验器和“嫦娥5号”探测器的研制过程中,还开展了综合空投、起飞上升、采样封装、交会对接、样品转移等多项试验,对方案设计和系统功能、性能进行了充分的验证。
在上述型号研制工作的基础上,已形成了月球探测器地面试验、月面环境模拟要求及方法等系列航天行业标准,规范了地面验证试验的项目、方法和内容,有力保证了地面验证试验的完整性和有效性,为月球探测后续任务以及行星探测任务的地面验证工作奠定了技术基础。
2.2 取得的科学成果
通过对“嫦娥1号”和“嫦娥2号”卫星的绕月遥感探测,实现了月球科学探测和对有开发利用前景的月球能源与资源的分布与规律进行全球性、整体性与综合性的探测,获取了月球表面环境、地貌、地形、地质构造、月岩与月壤的成分与结构以及物理场的探测数据[16-17]。“嫦娥1号”卫星携带的CCD立体相机、干涉成像光谱仪、γ/X射线谱仪、微波探测仪、太阳高能粒子探测器和太阳风离子探测器等5类科学仪器,共获取1.37 TB的原始科学探测数据;“嫦娥2号”卫星携带的科学仪器与“嫦娥1号”基本相同,所不同的是新研制了分辨率更高的CCD立体相机,绕月探测期间共获取3.5 TB原始科学探测数据。“嫦娥1号”和“嫦娥2号”取得的主要科学成果包括:全月球数字高程模型和三维月球地形图(如图 7所示),7 m分辨率全月球影像图(如图8所示),铀、钍、钾的全月球含量分布图,全月表矿物吸收中心分布图以及Fe/Ti元素含量分布的反演,全月球4频段月表微波辐射亮温数据,近月空间高能粒子和太阳风离子数据,近距离获得图塔蒂斯小行星10 m分辨率的图像等。

图7 “嫦娥1号”全月球数字高程图Fig.7 The global lunar DEM model mapped with Chang’e-1 LAM data
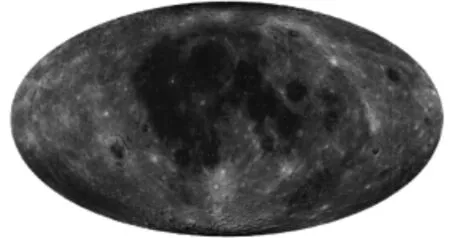
图8 “嫦娥2号”全月球7 m分辨率影像图Fig.8 The Chang’e-2 full map of the Moon with 7 meters’ resolution
通过“嫦娥3号”着陆器就位探测和巡视器巡视勘察,实现了“测月、巡天、观地”的目标,探测对象由“面”向区域性的“点、面、内部”一体化的综合性探测深入与发展,获取了月表形貌与地质构造、月表物质成分和可利用资源、日地月空间环境与月基天文观测等探测数据。“嫦娥3号”着陆器携带了地形地貌相机、降落相机、月基光学望远镜、极紫外相机等4类科学仪器,巡视器携带了全景相机、测月雷达、红外光谱仪、粒子激发X射线谱仪等4类科学仪器,截至2016年7月,获得各类数据共计7 TB。“嫦娥3号”探测器取得的主要科学成果包括:获取了月球外逸层水含量的最新结果,修正了国外得出的月球上有大量水分子存在的结论;获得1 300多幅地球等离子体层图像数据(如图 9所示),首次发现了地球等离子体层边界在磁层亚暴的影响下发生凸起的现象,提出了等离子体层的空间结构受到地球磁场和电场约束及控制的最新观点;国际上首次获得着陆区月壳浅层330 m深度的剖面结构特性及地质演化图;首次揭示了月球雨海区的火山演化历史;发现了一种全新的月球玄武岩。
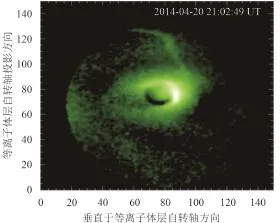
图9 “嫦娥3号”极紫外相机观测到的等离子体层图像Fig.9 Image of plasma layer by extreme UV camera of the Chang’e-3 probe
总之,中国的月球探测器已实现了:由对月球的全球普查到区域详查的跨越,由月球轨道遥感探测到多种手段综合月面就位探测的跨越,为月球及天文研究提供了宝贵的第一手原始数据。同时,在数据处理、反演和月球基础科学等方面取得了丰硕的成果,通过对这些科学数据的长期研究和不断深化应用,将进一步深化人类对月球和日地月乃至更大空间的科学认知,并将推动空间科学的发展和新兴学科的建立。
2.3 取得的人才队伍和基础设施建设成就
经过探月工程型号研制的锤炼,目前探测器系统已经形成了一支追求创新、不断超越的人才队伍,其中包括中国科学院院士1人、“万人计划”科技创新领军人才1人、973项目技术首席1名,973项目专家组成员3人、重大专项专家组成员5人、国务院政府特殊津贴专家5人,获得国家科技进步特等奖2项、国防科技进步特等奖3项,2014年获航天科技集团至今唯一的“国家科技进步奖创新团队”奖,荣获中国青年“五四”集体、全国“三八”红旗集体等多项荣誉称号,获得授权专利一百余项,出版科技专著六部,撰写国防科技报告二百余篇,发表学术论文近百篇,拥有一批具有自主知识产权的科技成果。这支以老专家、院士为顾问,以中年专家为核心,以青年骨干为主力“老中青”结合的人才队伍,为后续任务的顺利实施奠定了人力基础。
在月球探测器研制过程中,新研制了多维随动塔架(如图 10所示)、2万 N发动机高模试车台、高能脉冲风洞等特种试验设施;新建设了着陆悬停避障试验场、月面起飞上升试验场、着陆稳定性试验场、巡视器内场和外场、导航控制试验场、超声速电弧风洞和跨超/高超声速气动力试验系统等综合试验场所。填补了多项国内空白,为探测器的设计验证和地面试验提供了有力的支撑,并为后续任务地面试验验证奠定了坚实的物质基础。

图10 净高70 m的多维随动塔架Fig.10 Multidimensional follow motion tower with 70 m height insight
3 中国月球探测器技术发展展望
3.1 中国月球探测后续发展设想
探月工程“绕、落、回”三步走任务目标的实现,标志着我国具备了月球到达、月面着陆、月地返回的基本能力。总体看,我国的探月工程起步晚但起点高,任务次数少但涵盖内容多,投入少但产出多,整体能力快速发展。
结合国外发展趋势和我国实际情况,我国月球探测后续任务应以“常态化、规模适度”为基本发展原则,通过持续开展月球探测,不断深化月球科学研究和新技术验证,实现无人月球探测与载人月球探测的有机衔接,逐步实现从技术试验、科学探测向技术应用、资源利用的模式转变,形成全月面、全周期、复杂环境条件下的机器人月球探测能力,开展载人月球探测相关技术验证,力争引领国际月球探测的发展。
3.2 月球探测器工程技术发展建议
综合分析国外月球探测后续任务情况,未来我国探月工程技术发展重点应为:1)研制固定式、大范围内移动式等多种类型的月球探测器,为各类科学研究以及技术验证提供多种技术手段;2)提升月球探测技术能力,突破全月面到达、高精度着陆、智能机器人、深空自主导航、地月高数据率通信、无线能量传输等一系列关键技术;3)进行月面原位资源利用以及基础设施构建等技术验证,为载人月球探测储备技术基础。
建议先期重点开展的月球探测器工程技术研究项目:
1) 月球探测后续任务总体设计。主要包括:月球极区探测器系统级任务规划分析、月球极区环境及其影响分析和总体方案论证;月面低空飞掠探测器的总体方案论证、自主制导导航与控制、飞行动力和地面试验验证技术研究。
2)月面着陆缓冲行走一体化及多功能机器人技术研究。主要包括:着陆缓冲行走一体化方案设计、机构性能综合仿真分析与地面综合验证;月面多功能机器人系统总体方案设计、月面大范围灵巧机械臂技术研究、机器人系统人机交互及演示验证系统方案设计。
3)月地高数据率测控通信技术研究。主要包括:月-地激光通信极窄信标捕获、跟踪,月地激光通信系统空间强背景光噪声抑制和补偿,器地间振动和耦合扰动补偿等技术研究。
4)月面长期能源供给技术研究。主要包括:无线电能传输方案设计、无线电能传输系统建模与仿真、原理样机研制及性能评估。
5)科学探测与资源勘查技术研究。主要包括:地月高精度测距载荷、近地小行星预警载荷、远距离电磁辐射监测载荷、月面岩石就位定年载荷等样机研制和试验验证。
6)月面原位资源利用以及基础设施构建技术研究。主要包括:月壤原位成型、月面氧气/水等特定物质制备、月面环境生命科学实验等技术研究和设备研制。
3.3 月球科学研究发展建议
综合分析国内外的研究情况,月球科学研究发展重点可以概括为以下10个方面:1)月壳及月幔组成和演化;2)月球的内部结构;3)年轻的火山活动;4)月球年代学研究;5)太阳风及地球风与月球相互作用;6)获得一批短波射电天文观测数据;7)月球的水及其挥发成分;8)月壤及月尘形成机制;9)月面资源及可利用性;10)生物个体以及相互关系的影响。
建议先期重点开展的科学研究项目:
1)月面环境综合效应与月球演化进程研究。主要包括:月面尘埃、温度等环境综合效应探测;月球内部精细结构探测;火山岩石、月壳古老岩石的就位定年和样品的实验室精细分析。
2)月球资源开发利用和生命科学试验研究。主要包括:月面资源详查及其开发利用科学试验;低重力、高真空等月球环境下的生命科学、材料科学等试验研究。
3)月基天文观测与对地监测。主要包括:低频射电观测,填补0.1~1 MHz射频天文观测的国际空白;基于地月距离精确测量的广义相对论效应验证;月基近地小天体监测预警、地球空间天气事件和气候变化的长期定点监测。
4 结束语
经过50多年的航天工程实践和月球科学研究,特别是“绕、落、回”月球探测工程的实施,使我国已跻身于月球探测技术先进行列。但我们也应清醒地认识到,在探测手段、探测深度和探测广度,以及关键技术储备方面,我国同世界航天强国相比还存在一定差距。我国应持续开展月球探测,不断深化月球科学研究和新技术验证,保持在月球探测领域的优势地位,逐步实现空间技术向空间科学和空间应用拓展,为后续载人月球探测和月球资源开发利用奠定坚实的技术基础,并在国际月球探测领域实现由“跟随”到“引领”的跨越,使我国成为月球探测的领跑者。
[1]叶培建,彭兢.深空探测与我国深空探测展望[J].中国工程科学,2006,8(10):13-18.Ye P J,Peng J.Deep space exploration and its prospect in China[J].Engineering Science,2006,8(10):13-18.
[2]叶培建,黄江川,孙泽洲,等.中国月球探测器发展历程和经验初探[J].中国科学:技术科学,2014,44(6):543-558.Ye P J,Huang J C,Sun Z Z,et al.The process and experience in the development of Chinese Lunar probe[J].Scientia Sinica Technologica.,2014,44(6):543-558.
[3]叶培建,孙泽洲,饶炜.嫦娥一号月球探测卫星研制综述[J].航天器工程,2007,16(6):9-15.Ye P J,Sun Z Z,Rao W.Research and development of Chang’e-1[J].Spacecraft Engineering,2007,16(6):9-15.
[4]叶培建.嫦娥一号卫星的技术进步点[J].中国航天.2008,6(4):9-12.Ye P J.The technological advancement of Chang’e-1 probe.Aerospace China.[J].2008,6(4):9-12.
[5]叶培建,黄江川,张廷新,等.嫦娥2号卫星技术成就与中国深空探测展望[J].中国科学:技术科学,2013,43(5):467-477.Ye P J,Huang J C,Zhang T X,et al.The technology of Chang’e-2 probe and the prospect of China deep space exploration[J].Scientia Sinica Technologica.,2013,43(5):467-477.
[6]Sun Z Z,Jia Y,Zhang H,et al.Technological advancement andpromotion roles of Chang’e-3 lunar probe mission[J].Sci.China Tech.Sci.,2013,56(11):2702-2708.
[7]杨孟飞,张高,张伍,等.探月三期月地高速再入返回飞行器技术设计与实现[J].中国科学:技术科学,2015,45(2):111-123.Yang M F,Zhang G,Zhang W,et al.Technique design and realization of the circumlunar return and reentry spacecraft of 3rd phase of Chinese lunar exploration program[J].Scientia Sinica Technologica.,2015,45(2):111-123.
[8]叶培建,饶炜,孙泽洲,等.嫦娥一号月球探测卫星技术特点分析[J].航天器工程,2008,17(1):7-11.Ye P J,Rao W,Sun Z Z,et al.Technology characters analysis of Chang’e-1[J].Spacecraft Engineering,2008,17(1):7-11.
[9]黄江川,饶炜,孟林智,等.嫦娥二号卫星技术特点分析[J].航天器工程,2010,19(5):7-11.Huang J C,Rao W,Meng L Z,et al.Analysis of technology characters on Chang’e-2 Lunar obiter[J].Spacecraft Engineering,2010,19(5):7-11.
[10]孙泽洲,张熇,吴学英,等.月球着陆探测器任务分析研究[J].航天器工程,2010,19(5):12-16.Sun Z Z,Zhang H,Wu X Y,et al.Mission analysis of a Lunar soft lander[J].Spacecraft Engineering,2010,19(5):12-16.
[11]杨维廉,周文艳.嫦娥一号月球探测卫星轨道设计[J].航天器工程,2007,16(6):16-24.Yang W L,Zhou W Y.Orbit design for Lunar exploration satellite CE-1[J].Spacecraft Engineering,2007,16(6):16-24.
[12]周文艳,杨维廉.嫦娥二号卫星轨道设计.航天器工程[J],2010,19(5):24-28.Zhou W Y,Yang W L.Orbit Design for Chang’e-2 Lunar Orbiter[J].Spacecraft Engineering,2010,19(5):24-28.
[13]黄江川,张洪华,李铁寿,等.嫦娥一号卫星的制导、导航与控制[J].空间控制技术与应用,2008,34(1):29-32.Huang J C,Zhang H H,Li T S,et al.The Guidance,Navigation and Control for CE-1 Spacecraft[J].Aerospace Control and Application,2008,34(1):29-32.
[14]张洪华,李骥,关轶峰,等.嫦娥三号着陆器动力下降的自主导航[J].控制理论与应用,2014,31(12):1686-1694.Zhang H H,Li J,Guan Y F,et al.Autonomous navigation for powered descent phase of Chang’E-3 lunar lander[J].Control Theory & Applications,2014,31(12):1686-1694.
[15]孙泽洲,张熇,贾阳,等.嫦娥三号探测器地面验证技术[J].中国科学:技术科学,2014,44(4):369-376.Sun Z Z,Zhang H,Jia Y,et al.Ground validation technologies of the Chang’e-3 lunar spacecraft[J].Scientia Sinica Technologica,2014,44(4):369-376.
[16]欧阳自远,李春来,邹永廖,等.嫦娥一号的初步科学成果[J].自然杂志,2010,32(5):249-266.Ouyang Z Y,Li C L,Zou Y L,et al.The primary science results from the Chang’e-1 probe[J].Chinese Journal of Nature,2010,32(5):249-266.
[17]欧阳自远.嫦娥二号的初步成果[J].自然杂志,2013,35(6):391-395.Ouyang Z Y.Chang’e-2 preliminary results[J].Chinese Journal of Nature,2013,35(6):391-395.
通信地址:北京2417信箱1分箱(100086)
电话:(010)68197053
于登云(1961- ),男,研究员,博士生导师,中国航天科技集团公司科技委副主任,中国探月工程副总设计师。主要研究方向:航天器动力学与总体设计技术。
通信地址:北京市海淀区阜成路16号航天科技大厦(100048)
电话:(010)68370292
E-mail:yudyun@sina.com.cn
孙泽洲(1970- ),男,研究员,博士生导师,嫦娥3号探测器系统总设计师、火星探测器总设计师。主要研究方向:航天器总体设计。
通信地址:北京市5142信箱402分箱(100094)
电话:(010)68346413
E-mail:sunzezhoul970@126.corn
申振荣(1972- ),男,研究员,主要研究方向:航天器总体设计。
通信地址:北京市5142信箱373分箱(100094)
电话:(010)68346883
E-mail:zrshen@sina.corn
Achievements and Prospect of Chinese Lunar Probes
YE Peijian1,YU Dengyun2,SUN Zezhou3,SHEN Zhenrong3
(1.China Academy of Space Technology,Beijing 100094,China;2.China Aerospace Science and Technology Corporation,Beijing 100048,China;3.Institute of Spacecraft System Engineering,Beijing 100094,China)
This paper briefly reviews the overall development history of domestic and overseas lunar explorations firstly.Secondly the development and implementation of Chinese lunar probes are introduced.Thirdly the technical achievements and scientific results accomplished by Chinese lunar probes are concluded.Lastly the prospect of Chinese lunar probe is looked forward.
lunar exploration;lunar probe;achievement;prospect
V476.3
A
2095-7777(2016)04-0323-11
10.15982/j.issn.2095-7777.2016.04.004
叶培建,于登云,孙泽洲,等.中国月球探测器的成就与展望[J].深空探测学报,2016,3(4):323-333.
Reference format:Ye P J,Yu D Y,Sun Z Z,et al.Achievements and prospect of Chinese lunar probes [J].Journal of Deep Space Exploration,2016,3(4):323-333.
叶培建(1945- ),男,中国科学院院士,博士生导师,主要研究方向:航天器工程、飞行器总体。
[责任编辑:高莎]
2016-09-23;
2016-09-29
国家重大科技专项工程
猜你喜欢
学与玩(2022年6期)2022-10-28
军事文摘(2022年12期)2022-07-13
飞碟探索(2022年1期)2022-03-12
军事文摘(2021年18期)2021-12-02
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
太空探索(2014年2期)2014-07-12
太空探索(2014年1期)2014-07-10
太空探索(2014年1期)2014-07-10
