
基于时域缩放ERA方法的工作模态辨识技术
2017-02-09 02:00蔡毅鹏南宫自军陈国平
兵器装备工程学报 2017年1期
王 亮,张 妍, 蔡毅鹏,南宫自军,陈国平
(1.中国运载火箭技术研究院,北京 100076; 2.南京航空航天大学 振动工程研究所,南京 210016)
【信息科学与控制工程】
基于时域缩放ERA方法的工作模态辨识技术
王 亮1,张 妍1, 蔡毅鹏1,南宫自军1,陈国平2
(1.中国运载火箭技术研究院,北京 100076; 2.南京航空航天大学 振动工程研究所,南京 210016)
研究了基于时域缩放选带,使用振动模态特征系统实现算法(eigensystem realization algorithm,ERA)的工作模态辨识技术。分析了ERA环境激励模态辨识方法的理论,给出了时域缩放选带技术和真实模态挑选技术的方法以及工作流程。通过算例研究了采用时域缩放技术的ERA工作模态辨识方法。研究结果表明:使用该方法可以有效地辨识出结构的模态,且可以采用滑动时间窗的方法获得模态随时间的变化结果;用于辨识的数据长度需要包含所需识别模态的6~8周期;阻尼辨识结果的偏差随阻尼比理论值变大而变小,对于理论值从1%~5%,辨识偏差从175%减小至10%;一阶和二阶阻尼比辨识结果偏差基本一致;振型辨识结果MAC值均在0.99以上。
模态辨识;时域缩放;ERA;工作模态
由于飞行器在飞行过程中的激励无法精确测量,另外受到气动加热、外部气动力、飞行过载、飞行的刚体运动和发动机推力等外部因素的影响,不仅影响飞行器的模态频率,还影响飞行器的模态阻尼特性。设计结果与飞行结果的差异,使得控制能力挖潜、设计裕度的准确把握和研制难度的降低等方面无法深入开展,难以满足未来战术飞行器研制的发展需求。因此,基于遥测数据,采用环境激励模态辨识技术对飞行过程中的结构模态参数进行辨识,对设计参数进行验证显得非常重要。
环境激励模态辨识技术是将互相关函数同传统时域模态分析法相结合的方法,将响应之间的互相关函数代替传统时域模态分析法中的自由振动响应或脉冲响应函数。该方法不需要测量激励型号,而仅依靠各通道的时域响应数据进行系统的模态辨识。环境激励模态辨识的理论和思想在20世纪70年代初期出现,经过几十年的发展,形成了多种模态辨识的方法[1-2]。
工作模态分析研究最早可以追溯到1968年cole的单阶模态测试的随机减量法[3]。1973年Ibrahim提出了一种参数识别的方法,该方法仅利用时域信号即可进行识别工作,经多年的不断完善形成了独具一格的Ibrahim时域法(ITD法)。1983年Metgeay提出了单参考点复指数法[4],其核心是最小二乘估计,后来Leuridan和vold进一步发展了多参考点复指数法(PRCE)。1984年Pappa发表了特征系数实现法的专著,该方法利用了线性系统的状态方程和系统最小实现理论,属于多输入多输出的模态参数辨识方法,通过构造Hankel矩阵,利用奇异值分解技术,确定相互描述状态方程的系统矩阵和输入、输出矩阵,构成最小阶的系统,通过求解,得到系统的模态参数。
90年代以后,随着测试技术、信号分析技术和计算机技术的发展,模态参数辨识理论研究及应用获得很大进展。美国SADIA国家实验室的James和Carne[5]在1995年证明了系统脉冲响应与白噪声激励时两点之间的响应互相关函数有相似的表达式,从而将运用脉冲响应函数进行参数辨识扩展到应用相关函数进行参数识别,这就是自然激励技术(NExT)方法,并将该方法用于高速汽轮机叶片在工作状态下固有频率和阻尼比的识别。
近年来,国内外在模态参数识别领域研究在许多理论和应用中取得了较多的成果[6-8]。其中练继建等[9]对基于熵降噪的水工结构振动模态特征系统实现算法进行了研究。刘兴汉等[10]对改进的随机子空间法进行了研究。于开平等[11]用小波分析方法对结构系统的脉冲响应函数进行小波变换利用小波变换的幅值、相位与阻尼比、频率的关系进行参数辨识。王彤等[12]提出了一种基于频域空间域分解的工作模态分析方法。黄琴等[13]提出并实现了一种基于随机减量技术和复模态指示因子函数法的新型频域运行状态模态参数识别方法。
综上所述,针对工作模态辨识中结构模态阻尼比辨识不稳定的问题,本文在不改变ERA辨识算法的核心思想的基础上,提出了算法的前后处理方法,增加已有算法的阻尼比辨识稳定性。其中以已知特性的悬臂梁为例,提出了基于时域缩放选带,使用振动模态特征系统实现算法的工作模态辨识技术,研究了时域缩放选带技术和真实模态挑选技术的方法以及工作流程。
1 模态辨识技术
ERA法属于一种多输入多输出的时域整体模态参数辨识方法[14]。对于n维线性系统,当振动系统响应采用位移或速度传感器测量时,振动方程用向量表示为
(1)
其中Α、B、G别为系统矩阵、控制矩阵和观测矩阵。假设激励点数是L,测量响应点数是M,则B的阶数是(2n×L)阶,激励列阵F(t)的阶数为L,输出向量Z为M阶列阵。
设离散时间点为k=0,1,2,…,采样时间间隔为Δt,则t=t0+kΔt,简记kΔt为k,因此,连续系统以加速度表示输出的离散形式为
(2)

(3)

Z变换后得到传递函数
H(z)=z-2GA2(I-z-1A1)-1B1+z-1GB2+GB
(4)

构造Hankel矩阵
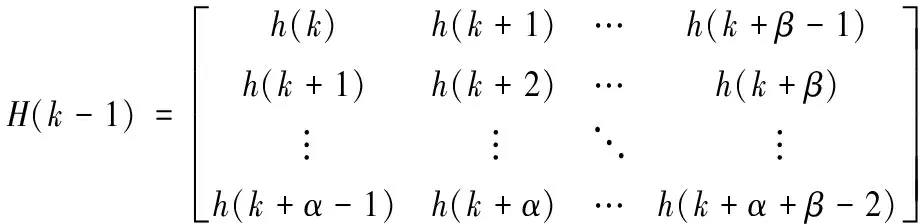
(5)
整理得
(6)
其中
α、β分别为能观、能控指数。
在式(6)中,令k=1,对H(0)做奇异值分解H(0)=U∑VT,可推导出
(7)

设系统矩阵A的特征值矩阵为Λ,特征矢量矩阵为ψ′,由指数矩阵的性质而知A1的特征矢量与A的相同,A1的特征值矩阵为
Z=eΛΔ t=diag(z1,z2,…,z2n)
(8)
由此可确定各个模态振动的固有频率、阻尼比和模态矩阵。
固有频率为
阻尼比为
模态矩阵为
Φ=Gψ
2 时域缩放选带技术
本文针对工作模态辨识中结构模态阻尼比辨识不稳定的问题,在不改变ERA辨识算法核心思想的基础上,提出了算法的前后处理方法,增加已有算法的阻尼比辨识稳定性。
时域缩放选带技术:研究时域缩放技术与ERA相结合,在ERA方法前后增加前后处理方法,前者采用小频带滤波方法缩小关心频带,达到放大有效信息的作用,去除无用频带的信息,后者在辨识结果中采用统计平均的方法进行模态频率和阻尼比数据处理,可提高有测试噪声影响情况下的结果鲁棒性。
实施流程图如图1所示。具体操作时,首先通过滑动矩形窗滑动时域信号,接着根据矩形窗内信号的功率谱密度分析结果,选择待辨识模态的频带范围,再对原始各通道信号进行选带滤波和重采样,再根据信号的数据长度自动生成ERA方法的阶次,进行ERA方法的模态辨识,最后将辨识结果与功率谱密度曲线谐振峰峰值进行对比,去除阻尼比过大的模态后,筛选出较为真实的模态。
3 算例
3.1 梁模型介绍
算例计算时,对悬臂梁悬臂端进行白噪声激励,将各处加速度响应作为输入进行工作模态辨识。悬臂梁模型如图2所示,各参数如表1所示。
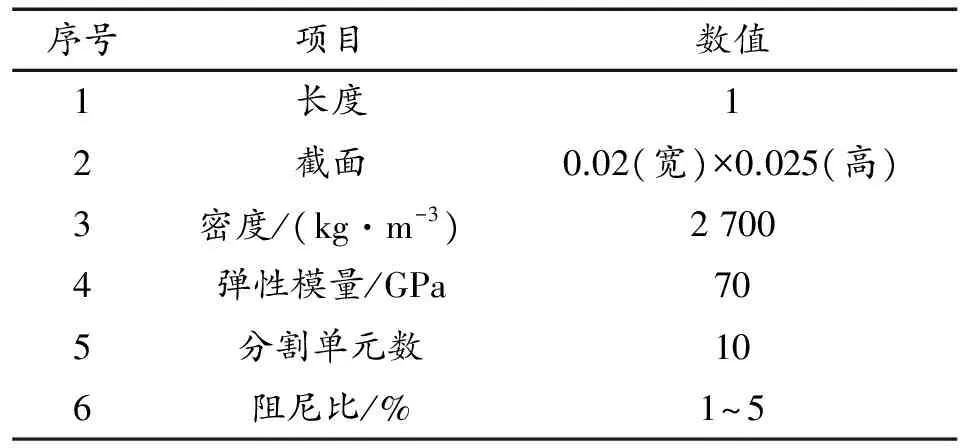
表1 悬臂梁参数
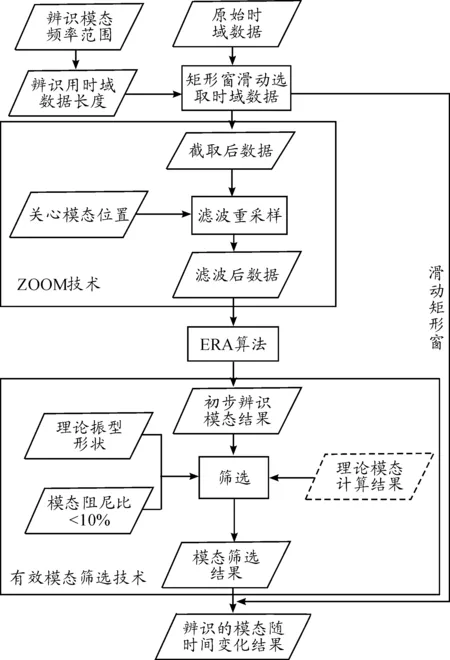
图1 加入时域缩放技术和有效模态筛选技术的ERA工作模态辨识技术流程
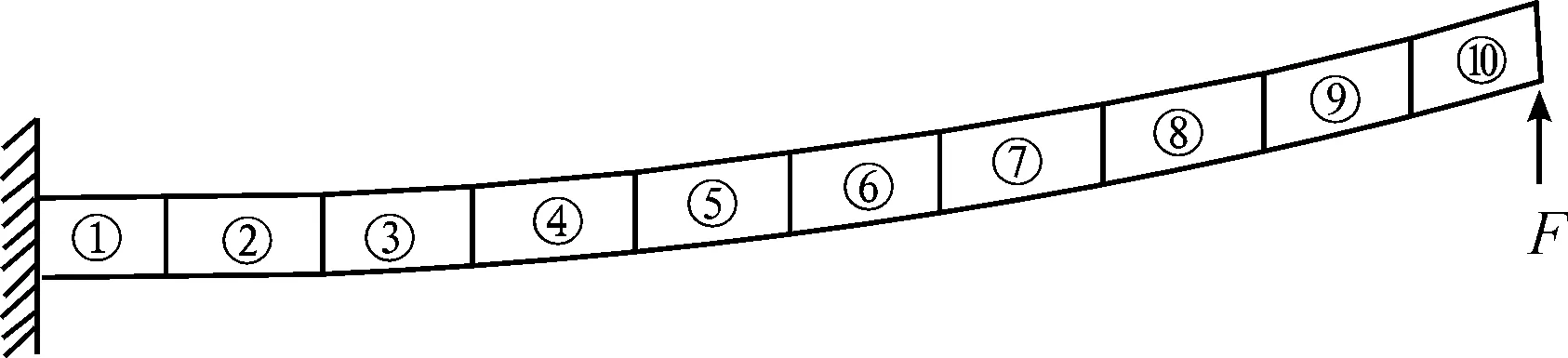
图2 悬臂梁模型
采用wilson-θ方法用800 Hz频带白噪声进行激励悬臂梁端部,获得各位置加速度响应,典型位置如悬臂梁端部加速度时域响应,其功率谱密度曲线如图3所示。
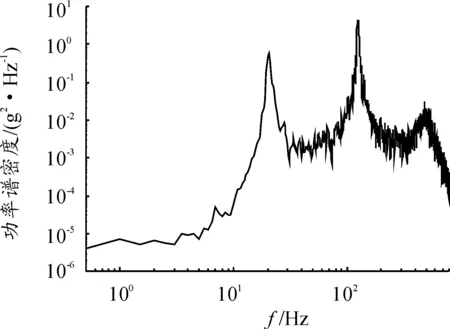
图3 悬臂梁端部响应的功率谱密度曲线
从图3可以看出,在400 Hz频带内,存在两阶模态,分别位于20 Hz和120 Hz,从200 Hz向上,响应信噪比较差,因此以下针对这两阶模态进行模态辨识研究。
3.2 辨识用数据长度研究
为了研究可有效辨识出模态的数据长度的需求,首先对信号使用功率谱密度分析,查看谱密度较大的频率,将该频率定为估计模态位置,按该频率可计算出估计模态的周期,按其周期的1倍到10倍的数据长度进行模态辨识,对比模态辨识结果,分析模态辨识用的数据长度要求。
研究发现,由于需要对时域缩放后的信号进行重采样,当数据包含关心模态频率5个周期以下时,重采样后的数据构成不了Hankel矩阵,因此无法进行模态辨识,而当数据长度大于关心模态周期5个周期时,使用ERA方法可正常辨识模态,需要注意的是,数据长度大于8倍关心模态频率时,数据长度过长,在构建Hankel矩阵时只使用到前段数据,而后段数据并未参与构件Hankel矩阵,因此在使用时域缩放技术后采用ERA方法进行模态辨识时,数据的长度最有可能需要包含所需识别模态的6~8周期。
3.3 工作模态辨识
这里以一阶模态辨识为例,研究时域缩放技术与ERA技术的结合对模态辨识的有利作用。
根据图3典型测点功率谱密度分析结果,选择频带10~40 Hz进行时域缩放滤波,再根据图1流程进行模态辨识,辨识结果如表2所示,典型振型辨识结果如图4所示,其中计算MAC值计算见式(9)。其中阻尼比理论值从1%~5%共设置了4个阻尼比,用于对比分析阻尼比理论值选择大小对辨识结果的影响。
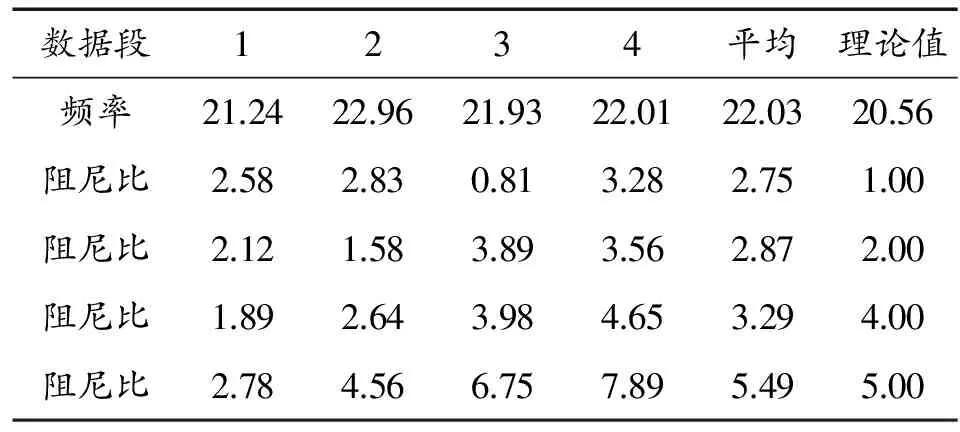
表2 一阶模态辨识结果
(9)

图4 模态振型辨识与理论计算结果对比
从以上辨识结果可以发现:
1) 采用时域缩放和ERA相结合的方法辨识可辨识出相应的模态,并且具备一定的精度,该结合方法有效;
2) 从频率辨识的结果可以看出,根据功率谱密度谐振峰参考方法以及过大阻尼筛选方法辨识可筛选出真实模态。滑动矩形窗后辨识出的模态频率较为准确,与理论模态频率值的最大偏差为4.3%左右;
3) 从阻尼辨识的结果可以看出,阻尼比理论值越大,辨识结果与理论值偏差越小,尤其是各段数据辨识结果的平均值,从理论值1%~5% 4个工况,平均值偏差从175%减小至10%;
4) 从振型辨识的结果可以看出,滑动矩形窗后筛选出的模态振型较为准确,与理论模态振型值的MAC值均在0.99以上,最差为0.993左右,证明辨识模态与理论模态振型基本一致。
3.4 辨识算法对信号信噪比的鲁棒性
根据以上分析,在3.3小节的基础上,研究增加不同量级噪声对模态频率和阻尼比辨识结果的影响。这里对比了噪声量级从信号标准差的0%~50%周期4种情况,辨识结果如表3所示。

表3 不同数据长度的模态辨识结果
对各节点数据同时增加不同噪声量级辨识模态时,从辨识结果可以看出:
1) 各阶模态频率辨识结果一致性较好,与理论计算结果较为一致;
2) 增加噪声后,无论是低频还是高频模态,对模态阻尼比辨识结果取均值,各阶模态阻尼比与理论值有一定的偏差,但偏差最大20%左右,随着噪声量级,阻尼比辨识结果比较稳定,没有出现辨识结果偏差明显变大的情况,说明本文的方法对信号的信噪比的鲁棒性较强。
4 结论
1) 采用时域缩放和ERA相结合的方法辨识可辨识出相应的模态,并且具备一定的精度和鲁棒性;
2) 在使用时域缩放技术后采用ERA方法进行模态辨识时,数据的长度最有可能需要包含所需识别模态的6~8周期;
3) 从频率辨识的结果可以看出,根据功率谱密度谐振峰参考方法以及过大阻尼筛选方法辨识可筛选出真实模态,滑动矩形窗后辨识出的模态频率较为准确;
4) 从阻尼辨识的结果可以看出,辨识阻尼结果偏差稍大,认为增加测试噪声后,辨识得出阻尼比最大偏差在20%左右;
5) 从振型辨识的结果可以看出,滑动矩形窗后筛选出的模态振型较为准确,与理论模态振型值的MAC值均在0.99以上,辨识模态与理论模态振型基本一致。
[1] SLAVIE.J,SIMONOVSKIL,BOLTEZARM.Damping Identification using a continuous wavelet transform:application to real data.Journal of Sound and Vibration[J].2003,21(2):291-307.
[2] 谭冬梅,姚三,翟伟廉.振动模态的参数识别综述[J].华中科技大学学报:自然科学版,2002,19(3):73-79.
[3] JOHNL CHRIDTIAN ASMUSSEN.Modal analysis Based on the Random Decrement Technique [D].Denmark:Aalborg University,1997.
[4] 郑敏,申凡,陈同钢.采用互相关复指数法进行工作模态参数识别[J].南京理工大学学报,2002, 26(2):113-116.
[5] JAMES G H,CARNE T G.The Natural Excitation Technique(NExT)for modal parameter extraction from operating structures[J].The International Journal of Analytical and Experimental Modal Analysis,1995,10(4):260-277.
[6] 李惠彬.大型工程结构模态参数识别技术[M].北京:北京理工大学出版社,2007:30-76.
[7] 孙晓兰,王太勇.基于相关函数的振动结构工作模态参数识别方法[J].天津大学学报,2007,40(4):503-506.
[8] KAMMER DC.Sensor Placement for On-Orbit Modal Identification and Correlation of Large Space Structures[J].Journal of Guidance,Control,andDynamies,1991,14(2):251-258.
[9] 练继建,李火坤,张建伟.基于奇异熵定阶降噪的水工结构振动模态ERA识别方法[J].技术科学,2008,38(9):1398-1413.
[10]刘兴汉,王跃宇.基于cholesky分解的改进的随机子空间法研究[J].宇航学报,2007,28(3):608-652.
[11]于开平,邹经湘.模态参数辨识的小波变换方法[J].宇航学报,1999,20(4):72-78.
[12]王彤,张令弥.工作模态分析的频域空间域分解法及其应用[J].航空学报,2006,27(1):62-66.
[13]黄琴,王彤,张海黎.基于随机减量的运行模态频域分析方法[J].南京航空航天大学学报,2011,46(6):770-773.
[14]伍特辉.声激励下结构模态参数识别的试验研究[D].南京:南京航空航天大学,2009.
(责任编辑杨继森)
Study on the Operational Mode Identification Based on ERA with the ZOOM Method
WANG Liang1,ZHANG Yan1,CAI Yi-peng1,NANGONG Zi-jun1, CHEN Guo-ping2
(1.China Academy of Launch Vehicle Technology, Beijing 100076, China; 2.Institute of Vibration Engineering Research, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Based on the ZOOM method, the operational mode identification was investigated under ambient excitation based on ERA method. Firstly, the theory of the ERA method was introduced. Secondly, the strategy for decomposition and implementation was put forward, including the ZOOM method and the modes’ filtration method. At last, an example as studied, where the cantilever beam was built and the white noise exciting was added. It is found that the mode can be realized by using the method, and the variety of the mode with the time can be present by using the sliding time window. A longer time period is most likely needed to capture at least 6~8 cycles of the mode for operational mode identification. The warp of the damping ratio identification becomes smaller as the theoretical value increases, where the warp changes from 175% to 10% as the theoretical value increases from 1% to 5%. The warps of the firstly and secondly order damping ratio identification are basically consistent. And the MAC of the model shape is all above 0.99.
mode identification; ZOOM; ERA; operational mode
2016-08-07;
2016-09-11
国家重点实验室2015年开放课题(MCMS-0115G01);国防技术基础科研项目(JSZL2015203B002)
王亮(1985—),男,博士,高级工程师,主要从事导弹载荷与环境设计研究。
10.11809/scbgxb2017.01.023
王亮,张妍, 蔡毅鹏,等.基于时域缩放ERA方法的工作模态辨识技术[J].兵器装备工程学报,2017(1):97-101.
format:WANG Liang,ZHANG Yan,CAI Yi-peng, et al.Study on the Operational Mode Identification Based on ERA with the ZOOM Method[J].Journal of Ordnance Equipment Engineering,2017(1):97-101.
TU311.3
A
猜你喜欢
电声技术(2022年7期)2022-09-23
工业建筑(2022年2期)2022-06-29
兰州交通大学学报(2022年2期)2022-04-26
哈尔滨工程大学学报(2021年10期)2021-11-05
地震研究(2021年1期)2021-04-13
风能(2020年4期)2020-10-10
铁路技术创新(2020年6期)2020-02-25
军事运筹与系统工程(2019年4期)2019-09-11
宇航计测技术(2019年1期)2019-03-25
空气动力学学报(2018年6期)2018-12-03
