
单声束周向旋转扫描探测技术
2017-02-09 01:52孟凡达马少杰朱海洋
兵器装备工程学报 2017年1期
孟凡达,马少杰,朱海洋
(南京理工大学 智能弹药技术国防重点学科实验室,南京 210094)
【光学工程与电子技术】
单声束周向旋转扫描探测技术
孟凡达,马少杰,朱海洋
(南京理工大学 智能弹药技术国防重点学科实验室,南京 210094)
针对阵列式超声探测系统空间限制和固有盲区的问题,提出了一种新型的超声波周向扫描方案。设计了可以实现调节声波信号发射角度和转速旋转扫描机构,该结构简单可靠。对超声波声场进行仿真,使用具有增强声场和指向性的超声传感器。在同步扫描系统的基础上,对单声束探测目标车辆信息、回波信号和脉冲频率与转速匹配关系进行数值仿真分析,确定信号脉冲频率与电机扫描转速的最佳匹配参数。使用原理样机进行扫描探测实验,结果表明:当超声脉冲频率f≥27 Hz,周向扫描转速范围n=233 r/min,周向扫描探测系统能捕获速度低于70 km/h的目标车辆,同时验证了超声波周向扫描探测可行性,为单束超声周向探测系统设计提供依据。
单声束;超声探测;扫描机构;周向;最佳频率与转速
声/超声复合探测体制,以被动声信号作为预警,用超声波测距技术进行目标方位与距离识别[1-2]。这种复合探测模式多用于智能雷系统。超声波主动探测需要采用全向探测体制提高超声波探测到目标的概率,实现对周围大视场的监控。
针对全向探测的问题,朱海洋等[3]建立了低功耗声/超声复合传感器节点设计,采用阵列式实现了全向探测,该方法存在空间和能耗限制问题;甘霖等[4]利用有向传感器以旋转扫描的方式建立了激光周向探测的模型;查冰婷等[5]人利用有向传感器旋转扫描的方式进行全向感知,并研究了脉冲频率和扫描转速的匹配关系。旋转扫描探测的方式多用于激光和毫米波探测,且激光、无线电波的旋转扫描系统已经得到应用,但是基于超声波的旋转扫描系统方法理论还未完善。
本研究在设计单束超声波周向探测机构的基础上,建立了单声束扫描探测的数学模型,分析了超声发射频率和周向扫描速度对探测目标车辆的影响,确定了最佳频率和脉冲,并进行了实验验证。
1 周向旋转扫描系统方案设计
1.1 传感器空间布置方案
大视场探测布局方式包括多辐射方案和分区方案。多辐射方案中采用多个收发一体的换能器形成探测场;分区方案相对于多辐射方案,所需换能器数量少,但是需要单个换能器增大辐射区域。除此之外还有分区扫描方案,需要多个传感器和旋转扫描系统。辐射方案和分区方案都需要采用几个甚至多个传感器,增加内部噪声,对系统空间要求较大。全向探测空间布局方式如图1所示。

图1 全向探测空间布局方式
现提出仅采用一个超声波换能器实现360°的周向旋转扫描探测方案。将传感器数量减少到最少,并可以保证对智能雷周围6 m范围内进行有效探测。
1.2 周向扫描系统的组成原理
从智能雷的发展趋势看复合探测手段有声/红外复合体制和另一种为声/毫米波复合体制。声/超声复合探测体制是以被动声信号作为预警,用超声波测距技术进行目标方位与距离识别。声/超声复合探测系统结构如图2所示。

图2 声/超声复合探测系统
超声波主动探测周向扫描系统采用同步扫描方案,系统包括超声波换能器(发射电路,接收电路)、机械扫描结构(包括电机、转子和旋转件)和电机驱动器(包括控制电路和调速模块)。周向扫描系统组成原理如图3所示。
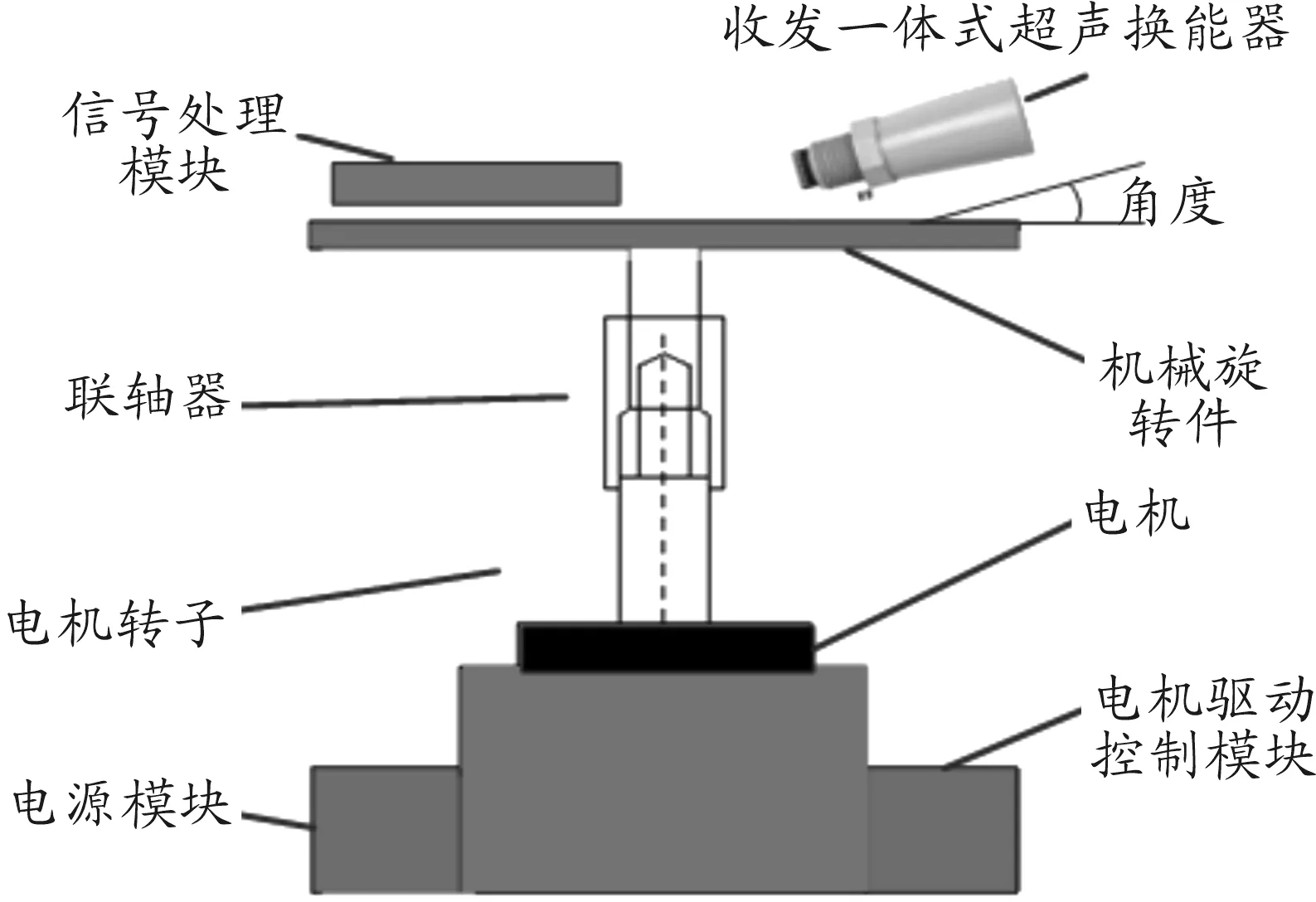
图3 系统组成原理图
整个扫描系统主要由电机、超声波换能器和旋转支架部件组成。旋转支架各个部件加工难度小,联接关系简单可靠,在实现同步扫描方案功能的同时,简化了系统结构,使单束超声波周向探测方案成为可能,为扫描系统提供机械结构上的支持。周向扫描系统工作流程如图4所示。

图4 周向扫描系统工作流程
该系统的工作过程为:在智能雷预警系统(被动声探测),当目标由远及近靠近节点时,信号采集到的有效信号幅值由小变大,信号达到设定阈值时,到达主动探测范围,给出信号唤醒特定节点主动探测系统。由控制系统发出主动探测信号,给电机和超声波模块通电,在驱动器和调速器的共同作用下,达到与超声波脉冲相匹配的转速,超声波换能器发出声波对周围6 m进行探测,当超声波换能器收到回波信号,将信号发回信号处理模块进行处理;完成对空间360°大视场的周向旋转探测。
2 超声波传感器的选择
超声波相比于20~20 000 Hz的声音信号,具有较好的束射性。但是超声波的振幅随着距离的增加呈指数形式衰减,且频率越大,衰减越严重[6-7]。综合探测距离和价格因素考虑,拟选用工作频率为40 kHz。目前普遍采用圆形的压电晶体作为超声波的发射与接收单元,因此超声波探头可以看成是圆形活塞的辐射源。根据惠更斯原理,任何复杂声源可以看作是许多点声源的组合。半径为a的圆形活塞式超声波发射探头,声场计算式为
(1)
式中:ω表示声源振动的角频率;ρ为介质密度;a为探头半径;ua为声源振动时的速度振幅;k=2π/λ为波数;λ为波长;J1为一阶贝塞尔函数;r和θ分别表示待测点到探头的距离和方位角。
根据上述超声波传感器模型,建立超声波发射声场仿真模型。在COMSOL中建立的超声波发射声场模型,设置空气域周围完美匹配层,使边界无反射,通过仿真,共振频率为40 kHz 的超声波换能器发射声场分布如图5所示。

图5 超声波传感器发射声场
图5中的colorbar表示声压级,单位为dB。由图5可以看出,该超声波传感器产生的声束具有一定的指向性,但随着距离的增加逐渐衰减,因此采用号筒增强声强和指向性。综上超声波传感器应选择频率为40 kHz,具有号筒的超声波传感器[8-10]。
3 扫描系统参数的选取
3.1 单声束探测目标车辆模型分析
扫描探测系统在空间上形成360°大视场的探测范围,使用增加号筒的超声波换能器波束角较小,可将声束简化为一条直线。单束超声波进行探测,系统受到回波信号后,目标车辆必须处于有效的攻击范围内。单声束探测目标模型如图6所示。
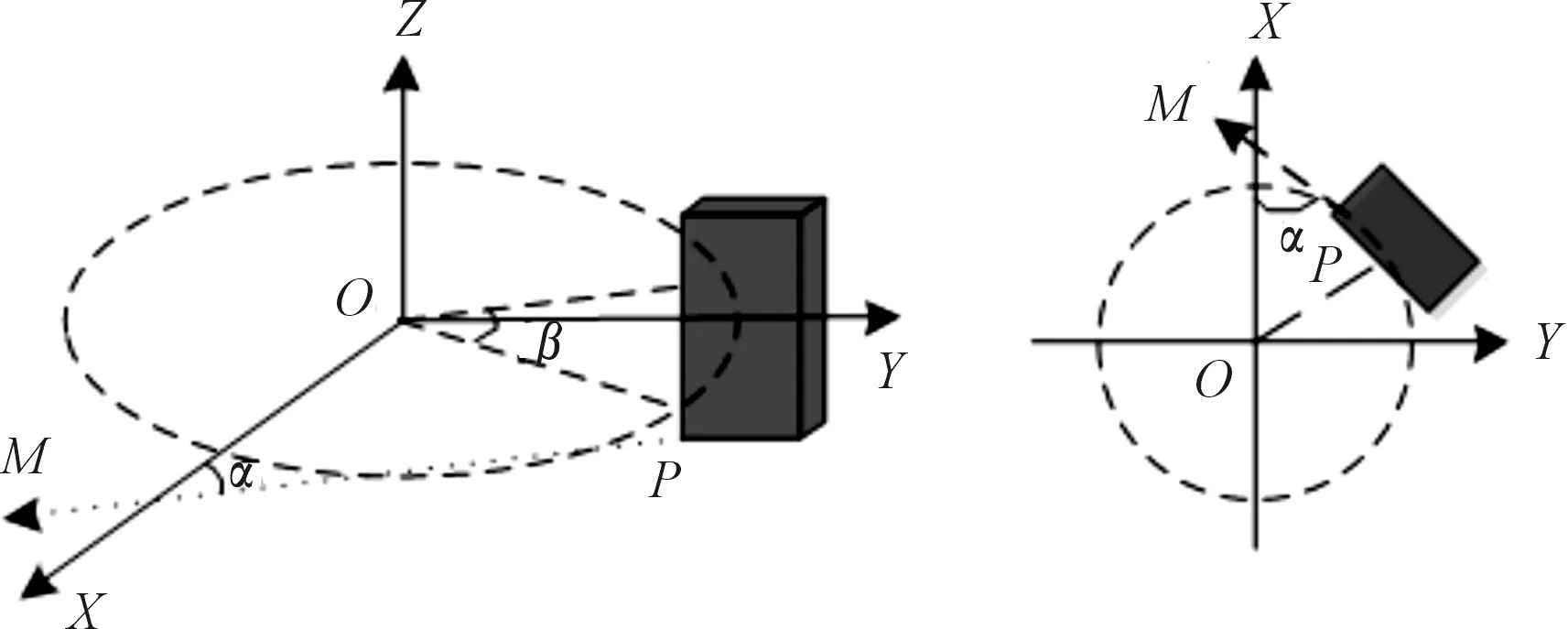
图6 单声束探测目标模型
图6中O点为超声换能器所在的位置,以旋转扫描的方式向周围进行探测。设超声探测信号与地面间的夹角为β,显然β为号筒夹角的一半。目标在水平面内沿PM方向以速度v移动,PM与X轴之间的夹角记为α。
传感器以脉冲方式进行工作,脉冲发送间隔时间取决于系统所要求的最大探测距离d(6 m)。因此可以估算出有效范围最佳的脉冲间隔发送时间:T=2d/343cosβ。最有可能丢失信号情况:目标车辆只经过一条超声波探测声束且刚好经过探测边界的P点时,换能器处于发射下一列脉冲起始时刻。
假设目标车辆到达P1点时,换能器发射信号并且与车辆目标相汇,时间间隔内目标移动到达P1点,探测信号在目标上的点到地面距离为h,扫描半径记为r,O点与P1之间的距离记为L
(2)
则超声波换能器目标上返回到接收回波信号的时间为
(3)
式中取c常温空气中的传播速度为343 m/s。此时换能器收到回波信号,目标车辆移动到下一个点P2的距离为S2=vt2,根据运动过程可知t1≥t2。为保证探测完成后目标仍处于有效的攻击范围内,需要满足车身长度l≥S1+S2,对于战地坦克数据为:行驶速度约65 km/h,车身高约为4 m,车身长度约5.0 m,由条件可知如下关系式
(4)
得出t1+t2≤0.055 s,求得坦克车辆行驶距离约1.0 m,小于车身长度。扫描系统可以对目标车辆进行有效探测。
3.2 回波信号与转速的匹配
单束超声波周向探测方案采用上文设计平台进行旋转扫描探测。扫描方法会导致探测区域出现周期性的探测盲区:扫描速度过慢,无法完成对探测区域的检测;扫描速度过快,导致探测距离缩短或者是无法接收到超声回波。当扫描转速与脉冲频率相当,才能有效地减小周期性探测盲区对探测性能的影响以及避免收不到回波信号的情况。超声波测距传感器旋转扫描时,发射超声波脉冲后,超声波换能器发生角度偏转,导致接收回波变小,测距范围也会相应减小。超声波周向扫描接收回波示意图如图7。

图7 超声波周向扫描接收回波示意图
对扫描平台上的超声波传感器回波进行分析,系统中要求超声波换能器测距范围为6 m,鉴于探测距离随转速变化,所以选择在静止条件下最远探测距离10 m的超声波换能器,如图7中的虚线所示。超声波周向扫描转速为n(r/min),当发射的超声波经距离为r、方位角为θ的目标反射后到达传感器时,超声波传感器已经旋转角度α。假设目标为全反射,声压不发生衰减;另外假设超声波为球面波辐射,在空气中传播时只考虑扩散衰减,因此声压随距离成反比衰减。那么超声波对距离为r,方位角为θ的目标探测时的接收回波公式为:
(5)
(6)
式中:P(θ)是超声波传感器在θ角方向上的声压。将α代入式(5),且只有Pr(r,θ)大于等于超声波传感器能感知的最小声压幅值时,才能被探测到。得到公式为:
(7)
根据式(7)可知不同转速对应不同的探测距离,如图8、图9所示不同转速下单次探测的最远距离及探测距离的变化趋势。
由图8可知,随转速的升高,超声波测距传感器的探测范围不断减小。当转速达到500 r/min,已经无法满足探测指标;根据图9曲线趋势的计算结果n≤253 r/min,即为探测距离为6 m时的最大转速。

图8 不同转速下单次探测的最远距离

图9 探测距离变化趋势
3.3 脉冲频率和转速的匹配
相邻声束间的夹角之和为2π,为保证每个扫描周期中的超声波声束数量相同且在固定角度上,则超声波单次测距周期T与机构扫描转速n(r/min)之间应存在如下关系:
(8)
(9)
其中:k∈Z,表示一个扫描周期内有k个探测点;T为周期;L为最大探测距离。设最大监控距离为6 m,L=6/cosβ。根据以上关系拟合曲线如图10所示。

图10 声束数量与转速关系
由图10可知,实线以下部分为满足条件转速。为保证达到最大监控距离,转速n≤253 r/min,保证k为正整数,可得出表1所示的结果。

表1 周期内探测点与转速的关系
车辆行驶轨迹只通过探测边缘,那么车辆通过监控区域的时间t=l/v。为了能够捕获到目标,必须在这段时间内保证超声波扫描机构完成大于等于一个周期的扫描,即60/n≤t。根据上文对目标车辆的分析,具有最好波束分布的最大扫描转速n=233 r/min,因此对于l=5 m长度的车辆目标,超声周向扫描能够捕获最大速度为70.0 km/h行驶的目标。
4 原理样机设计及扫描探测试验
根据仿真分析得出超声波脉冲频率和扫描机构转速的匹配关系,设计并加工原理样机模型及选则传感器。原理样机如图11所示。

图11 原理样机模型
如图11所示电机转子与机械旋转零件以联轴器可靠连接。机械旋转件全部采用轻质铝合金加工,保证可靠性的同时减轻质量,减小电机负载,缩短电机稳速时间。超声波传感器与旋转件之间通过螺纹可靠连接。信号发射角度,超声波传感器探测范围为6 m,发射信号与车身交会点取车身中部即h=2 m,得出传感器发射角度β=18.4°。针对单声束探测实验如图12所示。一辆小型轿车长约5 m,以70 km/h的速度从节点上方临界条件处通过,取最佳匹配参数、转速n=100 r/min和转速n=300 r/min条件进行实验。
针对3种情况分别进行10次实验。收到回波时,通过无线监控模块向范围外的监控点发送数据。
1) 取最佳的匹配参数,原理样机模型转速调至233 r/min,通过定时器改变发射频率f=27 Hz,汽车通过时的数据如图13所示。
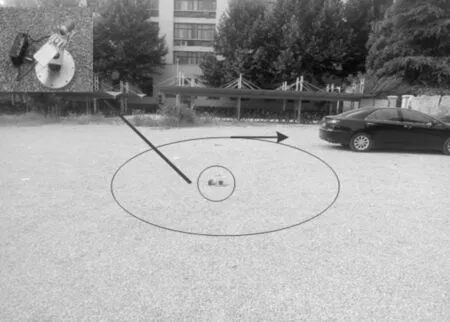
图12 实验场景
2) 将转速调至300 r/min进行实验。根据转速与频率的关系,可知此时超声波声束减少,无法实现对周围监测,需要更改信号频率实现全面覆盖。当汽车通过时,监测点未收到探测数据。
3) 将转速调至100 r/min进行实验,此时不需要更改信号发射频率,10次实验中存在无效数据。

图13 临界条件下波形
如图13所示,传感器输出PW波形宽度为37.71 ms,脉冲宽度即表示所测距离,比例因子为58 μs/cm,可知测得L=6.50 m,d=6.17 m。为保证扫描探测实验可靠性,用原理样机进行静态测距实验,静态下测得6 m处波形为如图14、图15所示。

图14 静态测距实验
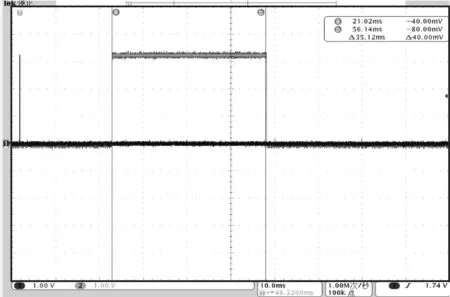
图15 静态6 m处回波信号
由图15可知PW波形宽度为35.12 ms,距离为6.05 m。误差在1%以内。扫描探测实验最大误差仍然在5%以内。误差增大原因是随着转速增大,信号探测角度逐渐增大,导致可以接受到的回波信号变差甚至丢失。实验结果表明:超声脉冲频率为27 Hz,周向扫描转速为n=233 r/min,在6 m探测距离内的周向探测系统能有效探测目标;随着转速的提高,探测误差逐渐增大以及探测距离缩短,所以对于体型更小、速度更快的目标,应该增加传感器,形成多发多收,扫描一周的时间更短以及形成更多的超声波波束,而不是单纯的增加转速。
5 结论
根据超声波探测原理和扫描探测方案,提出单声束旋转扫描探测方案,设计出了旋转扫描平台。对超声波声场进行仿真,使用具有增强声场和指向性的超声传感器,对单声束探测捕获目标车辆信息、回波信号与转速匹配关系和脉冲频率与转速匹配关系进行数值仿真分析,计算出测距范围内的最大转速,确定信号脉冲频率与电机扫描转速的最佳匹配参数为:超声脉冲频率为f≥27 Hz,周向扫描转速范围233 r/min≤n≤253 r/min,周向扫描探测系统能捕获6 m范围内速度低于70 km/h的目标车辆。若要监控更高速度或更小体积的目标时,只需在旋转机构上添加额外的传感器。
[1] 杨波,邹富强.异向性磁阻传感器检测车流量的新方法[J].浙江大学学报(工学版),2011,45(12):2109-2114.
[2] 李元实,王智,鲍明.基于无线声阵列传感器网络的实时多目标跟踪平台设计及实验[J].仪器仪表学报,2012,33(1):146-153.
[3] 朱海洋,张合,马少杰.低功耗/超声复合传感器节点设计[J].仪器仪表学报,2014,35(10):2223-2230.
[4] 甘霖,张合,张祥金.激光近炸引信单光束脉冲周向探测技术研究[J].红外与激光工程,2013,42(1):84-89.
[5] 查冰婷,张合.单光束脉冲激光引信扫描频率和脉冲频率研究[J].红外与激光工程,2014,43(7):2081-2086.
[6] 潘仲明,贺汉根.超声阵列障碍探测技术及其在无人车辆中的应用[J].国防科技大学学报,2009,31(2):121-125.
[7] BANGTSSON D E,NORELAND,BERGGREN M.Shape Optimization of an Acoustic Horn,Technical Report 2002-019[R].Department of Information Technology,Uppsala University,2002.
[8] 朱金台,董晓龙,林文明.Ku波段旋转扫描扇形波束散射计底面扩展目标在轨定标[J].电子与信息学报,2013,35(8):1793-1799.
[9] 彭映城,浅海,曹龙.一种高精度超声测距系统设计[J].电子测量技术,2013,36(10):16-30.
[10]石新军,孙文盛.基于气介式声传感器智能雷探测系统研究[J].传感器与微系统,2006,25(5):85-88.
(责任编辑杨继森)
Study on Single Acoustic Beam Circumferential Detection Technology
MENG Fan-da, MA Shao-jie, ZHU Hai-yang
(National Key Laboratory of Intelligent Ammunition Technology,Nanjing University of Science and Technology, Nanjing 210094, China)
For the problems of ultrasonic detection system to space limitations and inherent blind spots, a new type of ultrasound circumferential scanning program was put forward. First of all, the rotary scanning structure was designed, which is simple and reliable and can adjust the angle of the acoustic emission signals and the rotating speed. Ultrasonic transducer with the enhanced sound field and direction is chosen according to ultrasonic sound field simulation. Secondly, on the basis of synchronous scanning scheme, best match parameter signal pulse frequency and scanning speed of the motor was confirmed according to numerical simulation analysis about single-beam probe target acquisition vehicle and the echo signal and the rotating speed and the relationship of pulse frequency and rotating speed. At last, we proposed scanning probe experiments with the use of principle prototype. The results show that target acquisition rate was analyzed. Calculating results demonstrate that the highest speed of ultrasonic circumferential scanning system is 233 r/min in the case of good compatibility when the ultrasonic pulse pace isf≥27 Hz, which can acquire the target with a speed lower than 70 km/h and verify the feasibility of ultrasonic scanning probe week. This provides basis for design of single beam ultrasonic circumferential detection system.
single acoustic beam; ultrasound probe; scanning mechanism; circumference; optimal frequency and speed
2016-08-22;
2016-09-25
国家自然科学基金项目(51275248)
孟凡达(1990—),男,硕士研究生,主要从事目标探测与识别技术,机电一体化研究;马少杰(1967—),男,博士,教授,博士生导师,主要从事机电系统分析与设计技术和智能化机电产品设计技术研究;朱海洋(1990—),男,博士,主要从事无线传感器网络节点自定位与目标定位技术研究。
10.11809/scbgxb2017.01.028
孟凡达,马少杰,朱海洋.单声束周向旋转扫描探测技术[J].兵器装备工程学报,2017(1):119-124.
format:MENG Fan-da, MA Shao-jie, ZHU Hai-yang.Study on Single Acoustic Beam Circumferential Detection Technology [J].Journal of Ordnance Equipment Engineering,2017(1):119-124.
TP212;TB55
A
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国典型病例大全(2022年7期)2022-04-22
航空发动机(2022年1期)2022-03-11
水下无人系统学报(2020年1期)2020-03-06
科技信息·下旬刊(2018年9期)2018-10-21
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
航空发动机(2018年4期)2018-09-18
电子制作(2018年2期)2018-04-18
舰船电子工程(2017年11期)2017-12-25
