
容错飞行控制技术的应用研究现状与发展趋势
2017-02-15 03:02王发威廖开俊
飞行力学 2017年1期
王发威, 廖开俊
(空军第一航空学院 航空仪电工程系, 河南 信阳 464000)
容错飞行控制技术的应用研究现状与发展趋势
王发威, 廖开俊
(空军第一航空学院 航空仪电工程系, 河南 信阳 464000)
如何将容错飞行控制理论研究与工程应用紧密结合是值得关注的问题。从解决飞控系统自身故障的余度容错技术、解决飞控系统被控对象故障的容错控制技术和制约主动容错控制发展的故障诊断技术3个方面研究了容错飞行控制在工程应用中的发展现状。分析了容错飞行控制的核心技术和难点问题,对未来容错飞行控制技术的发展提出了思考与建议。
飞行控制; 容错控制; 余度; 故障诊断; 鲁棒性
0 引言
容错控制是保证飞机在发生舵面故障时安全飞行、提高飞机生存力的主要技术之一,是未来先进飞机必然采用的关键技术[1-2]。近几十年来,容错飞行控制技术在理论上取得了巨大进步,各种控制方法层出不穷[3]。然而20世纪60年代末至今,经历了近半个世纪的发展,被控对象——舵面故障的容错控制仍停留在理论研究和模型试验阶段,尚未在现代飞机工程实践中成熟应用。
国外已经对容错飞行控制进行了大量的模型试验,特别是在无人机已大规模投入作战使用的情况下,美国更是加大了该方向的研究力度。2008年7月,美国罗克韦尔科林斯公司已经利用F/A-18模型机成功实现了容损飞行。当丢掉60%机翼后,设计的自动监管适应控制系统能在20 ms内对故障进行反应,控制飞机平稳飞行,成功安全返航着陆。
有专家预计自动监管适应控制系统将成为美军下一代无人战斗机的标准飞行控制系统。我国在“九五”期间也进行了容错飞行控制相关研究,并取得了突破性进展,但在实际飞行中验证成功较少。因此,开展可工程化实际应用的容错飞行控制方法研究已刻不容缓。本文探讨了飞行控制系统容错方法应用研究现状,并指出了其发展趋势和需要解决的关键问题。
1 飞行控制系统容错类型及余度技术
对于飞行控制系统的容错,首先需要清楚容忍什么样的错误。飞控系统主要有两方面的故障:一是飞控系统自身发生的故障;二是飞控系统被控对象的故障。
飞控系统自身主要包括:感知环节——传感器、决策环节——计算机、显示环节——显示装置、执行机构——舵机和机内自测试;飞控系统被控对象主要为舵面。对于飞控系统自身发生的故障,已采用余度容错技术成功解决;而飞控系统被控对象的故障,则需要采用容错控制技术。
余度是指需要出现两个或两个以上故障,而不是一个单独故障,才会引起既定不希望发生工作状态的一种设计方法[4]。余度对应着安全性等级,如三余度部件是1次故障工作、2次故障安全。其中可靠性是指故障概率,安全性是指损毁概率。
目前世界上对飞控系统安全性指标一般是:军机10-7/h,民航10-9/h,其中个别子系统要达到10-11/h[3]。为了达到该指标,军用飞机大都采用相似余度,即采用多套相同的系统实现同一功能;民用飞机一般采用非相似余度,即采用多套不同的系统实现同一功能,包括软件和硬件两方面,以防止出现相似余度的共性故障。
总之,余度技术解决了飞控系统自身发生的故障。但是余度技术增加了系统的复杂性,其本质是以故障率的提高换取安全性。发展趋势是如何使余度技术更加完善,需要解决两方面问题:
(1)体系结构问题。即余度采用什么结构,相似余度和非相似余度混合配置,以及软件非相似余度的论证和取舍问题。
(2)传感器重构问题。即当多余度传感器同时坏掉时,如何通过其他传感器重构状态信息问题。
2 容错飞行控制技术
1970年,NASA飞行动力实验室首先提出实时的飞行控制重构思想[5]。20世纪80年代后期,容错飞行控制系统主要研究对建模误差具有鲁棒性的故障诊断、对故障在大范围内具有鲁棒性的控制律设计方面的问题。
根据对故障诊断的依赖情况,容错飞行控制也分为被动容错飞行控制和主动容错飞行控制。
2.1 被动容错控制
由于不依赖故障诊断,被动容错飞行控制具有实时性高、在设计的范围内鲁棒性强的优点,需要解决的核心问题是在大包线范围内控制方法的容错能力和鲁棒性。被动容错飞行控制方法主要有:自适应控制、滑模控制、特征结构配置、模型参考+动态逆、定量反馈理论、神经网络、模糊逻辑和交互多模型等。
被动容错控制律具有实时性好、出现舵面故障能紧急防止飞机在短时间内失控的优点,许多学者将其作为应急控制律使用。但其设计比较复杂,只能在具体范围内实现容错控制,而一旦超过该范围,往往需要改变控制律的参数甚至结构。
2.2 主动容错控制
由于有故障诊断单元提供故障信息,主动容错飞行控制律设计简单、结构统一、故障信息清晰,如果故障诊断精确,则容错性能好,需要解决的核心问题是故障诊断的快速性和鲁棒性。因此要发展主动容错飞行控制技术,首先要研究故障诊断技术。
3 飞行控制系统故障诊断技术
3.1 故障诊断快速性
故障诊断快速性是指必须在短时间内快速识别舵面损伤程度。因为主动容错飞行控制需要在一定时间内获取故障信息,否则将毫无用处。缺少实时、快速的飞控系统故障诊断方法是制约主动容错控制发展的最主要、最关键的因素。
Frank[6]将故障诊断方法分为基于知识的、基于信号处理的和基于解析模型的三大类。对于飞控系统的快速故障诊断,目前研究成果最多、应用最为广泛的是基于解析模型的方法。基于模型的方法的最大优点是不仅可以得到故障信号的类型、性质、严重程度等信息,还能得出故障的发展过程,甚至预测出系统将来发生故障的时间等。这为飞行控制系统提供了最直接的故障信息,为容错控制分配提供了最需要的决策依据。同时,基于解析模型的方法具有实时性好、鲁棒性强等特点,具有很大的工程实际应用价值。
根据残差产生形式的不同,基于解析模型的方法又可以分为等价空间方法、参数估计方法和状态估计方法。
(1)参数估计方法
1984年,Isermann[7]对实际系统进行机理分析,首次提出了基于参数估计的故障诊断方法。参数估计方法主要有最小二乘法、极大似然法、预报误差法等,其中最小二乘是飞控系统应用最成熟、最广泛的故障诊断方法[8-9]。
1795年,Gauss正式提出了最小二乘的基本概念,并将其应用于天文计算中。最小二乘方法包括:一般最小二乘、加权最小二乘、辅助变量法、广义最小二乘、增广矩阵法、遗忘最小二乘、限定记忆最小二乘和它们的递推算法等。
但是,采用时域最小二乘方法进行故障诊断普遍存在以下问题:
①在平稳状态下,由于飞机的控制量和状态量相对而言是个常数,信号的相对值小于噪声的相对值,当参数远离已知先验值时,除非在代价函数中包含恶化行为项或者恶化时间项来调整参数估计,否则,时域的递归方法将会导致参数估计不准确;
②当一个控制面到其他控制面的控制量和状态量几乎成比例时,从孤立的测量数据中辨识各自的稳定值几乎是不可能的。
(2)状态估计方法
1971年,Beard首次提出了基于状态估计的故障检测方法[10]。该方法利用系统中可观测的状态作为输入信号,通过构造观测器/滤波器使估计的系统状态与输出在某种指标下等于原系统,然后将估计值与测量值的差作为残差,比较残差信号与设定的阈值来检测系统故障。
按照组织结构的不同,状态估计方法可分为:对确定性系统的全维状态观测器、降维状态观测器、未知输入观测器、自适应观测器、滑模观测器、高增益观测器和智能观测器等;对随机系统的卡尔曼滤波器、H∞/H-/H2滤波器等。其中卡尔曼滤波及其扩展形式具有实时性好、处理随机噪声效果好的特点。自诞生以来,卡尔曼滤波就受到航空界的高度关注。其形式有一般卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波、强跟踪卡尔曼滤波、容积卡尔曼滤波、平方根卡尔曼滤波等。
飞控系统故障诊断的快速性需要解决如下问题:
①当发生故障时,容错控制需要由故障信息在飞机短周期内多次调整飞行状态,因此故障诊断时间应该极短,目前单一的故障诊断方法难以满足实际容错飞行控制实时性要求。
②故障诊断应该多快才能满足容错控制要求,快速性和误警率如何取舍,尚无统一标准。
3.2 故障诊断鲁棒性
故障诊断鲁棒性是指在建模误差等不确定性影响下仍能准确诊断系统故障。在地面半物理实验中发现,对于舵面损伤故障,缺乏鲁棒性是制约诊断方法准确性的主要因素。故障诊断的鲁棒性方面,目前研究最多、应用最广泛的是采用状态估计的观测器方法,主要有未知输入观测器、自适应观测器、滑模观测器、高增益观测器和智能观测器以及H∞/H-/H2滤波器等。
(1)未知输入观测器
未知输入观测器主要用于解决系统建模误差和外部扰动导致存在未知输入信息的问题。其利用Luenberger观测器设计中的自由度,使得观测器对故障敏感,而对系统的未知输入不敏感,具有很强的鲁棒性。目前许多学者将UIO与迭代学习、在线神经网络、高增益近似微分和滑模相结合实现对未知输入的鲁棒性。
(2)自适应观测器
自适应观测器主要用于解决系统状态和模型参数的联合估计问题。该方法基于自适应控制思想而产生,通过在线调整观测器增益,补偿未知参数或缓变故障对残差的影响。目前自适应观测器的研究主要集中在突破严格约束条件限制、与其他方法相结合方面[11-14]。
(3)滑模观测器
滑模观测器主要用于解决系统中不确定性问题,其基本思想来源于滑模控制理论。
Edwards等[15]首先提出了滑模观测器方法对线性系统进行故障诊断,并提出用“等效输出注入”的观点对故障信号进行重构。当前有学者针对含非匹配不确定系统的故障重构问题,将滑模控制解决非匹配不确定思想应用于故障诊断,指出收敛域大小取决于未知输入扰动范围,随后对于满足一定几何条件的非线性不确定系统,设计了能精确进行故障重构的滑动模态[16]。
(4)高增益观测器
高增益观测器能够估计系统输出的导数项,且不依赖于系统的数学模型,通常结合其他观测器一起,在非线性输出反馈控制中得到广泛应用。
高增益观测器往往结合其他方法使用[17-19],如将高增益观测器与模糊自适应理论相结合,通过模糊逻辑设计了高增益模糊自适应观测器;与神经网络自适应理论相结合设计的非线性飞控系统检测方法;与自适应相结合,采用自适应增益取代切换增益的自适应高增益观测器。
(5)H∞/H-/H2滤波器
H∞/H-/H2滤波器方法来源于鲁棒控制理论,主要考虑系统的不确定性,将系统不确定性和故障分别用不同的范数表示,使系统对故障敏感而对干扰等不敏感,从而实现鲁棒故障诊断[20]。
常用的飞控系统故障诊断方法的研究发展如表1所示。
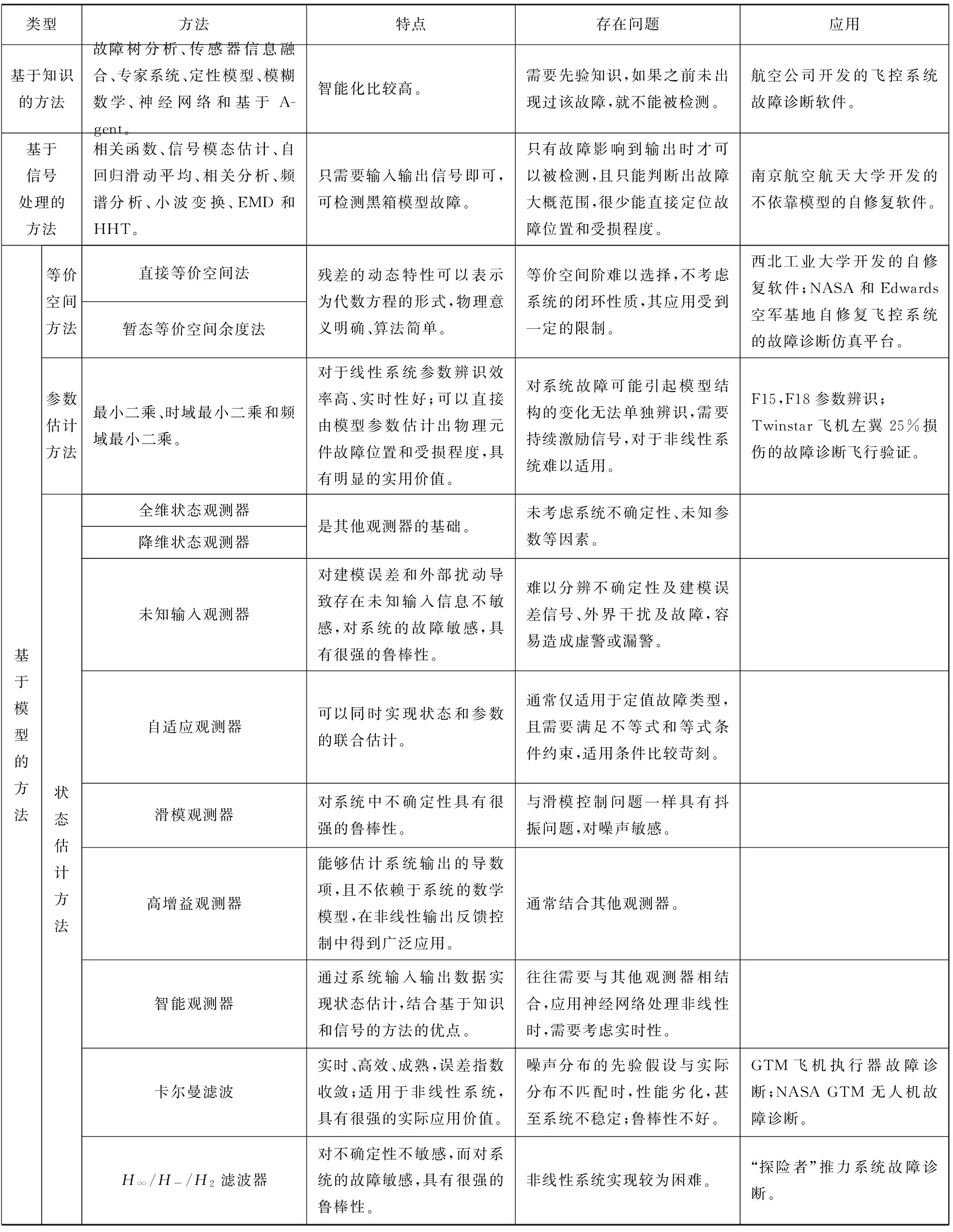
表1 飞控系统故障诊断方法
对于飞控系统快速故障诊断,基于状态和参数估计的方法具有明显的优点。其中状态估计方法具有较好的实时性,适用于非线性系统和鲁棒检测,对系统的输入信号要求不严,但是很难准确进行损伤估计和故障隔离。参数估计方法可以精确估计出故障位置和受损程度信息,实时性较好,但是不适用于非线性系统,需要激励信号。可以看出,状态估计和参数估计两种方法具有优缺点互补性,如果能结合使用,将会取得更大效果。
4 容错飞行控制技术发展趋势
我国航空界在20世纪末由郭锁凤、胡寿松、陈复扬、张平、陈宗基等团队开始了容错飞行控制系统执行机构故障诊断研究工作,并建立了飞控系统的故障监控覆盖率评估方法。胡寿松、邓建华、艾剑良、王美仙等针对飞行控制系统开发出容错控制仿真平台。随后更多的飞控系统故障诊断方法与仿真平台被开发出来,理论研究向非线性容错飞行控制、智能容错飞行控制方向发展。考虑到实际应用,目前容错飞行控制主要有以下发展趋势:
(1)主动容错控制和被动容错控制相结合
该思想是“先应急容错,再故障诊断,最后容错”。即当无故障或在检测出飞行器故障时,先采用被动容错控制方法,保证飞行器短时间内不失事,在此期间进行故障定位和隔离,然后根据故障重构信息,采用主动容错控制实现全包线范围内稳定。
(2)容错控制和控制分配技术相结合
20世纪90年代初,道格拉斯宇航中心明确提出了基础控制律生成虚拟指令,控制分配将其分配到舵面的层级飞行控制结构,并在F-15ACTIVE验证机上进行了重构控制验证[21-22]。其基本思想是,在满足执行机构约束前提下,将上层控制指令依据优化指标分配到冗余执行机构上,实现不同的控制性能。控制分配可以在舵面故障时,通过调整冗余舵面补偿故障舵面造成的气动力损失,保持飞机性能,是容错控制系统设计中的重要技术。目前控制分配方法可以分为:广义逆法、链式法、直接分配法、线性规划法和非线性控制分配法等。
容错控制和控制分配技术相结合形成“主环+伺服环”的层级飞行控制结构,主要有以下优点:
①“主环”容错控制律用以实现舵面故障下,期望操纵品质需要的控制力或力矩,可暂时忽略冗余操纵面的可用数目、工作状态等诸多因素,直接针对飞机三轴方向的气动力或气动力矩进行设计。在减少需处理控制变量数目的同时,可以根据需要的性能设计针对性强的容错控制律,简化了控制系统的结构,降低了控制器设计的难度。
②“伺服环”控制分配器可以综合考虑飞机、操纵面的动态特性、故障情况、实际物理约束等影响。根据飞行性能指标,将控制律生成的虚拟控制指令优化分配到真实的控制操纵面上,达到飞机俯仰、滚转及偏航等运动的耦合优化控制,是“主环”控制器和飞机运动之间的载体。
③当舵面出现故障时,级联式容错控制结构只需将故障诊断信息传送给控制分配环节,仅改变“伺服环”控制分配器对各个舵面分配的控制指令,而不需要改变“主环”虚拟控制指令的逻辑和控制结构,实现“主环”、“伺服环”各司其职。
④级联式容错控制结构可以使容错控制律和控制分配律分开设计,当故障诊断出现时滞和误差时,只对控制分配产生影响,从而可以设计容错控制方法外环提高系统鲁棒性和指令跟踪能力,降低了对故障诊断实时性和准确性的苛刻要求。
5 结束语
飞行控制是一个理论研究与工程应用结合紧密的领域,对于容错飞行控制应用的现状,建议加强以下4个方面的研究:
(1)加强创新型余度容错体系结构研究;
(2)加强大包线范围高安全性的鲁棒容错方法研究;
(3)鲁棒的控制方法会对故障诊断产生影响,加强鲁棒容错控制和故障诊断方法集成研究;
(4)加强对建模误差等不确定性的高实时性、低误警率的故障诊断方法研究。
工程化的故障诊断方法需要注意以下问题:
(1)只有简便成熟的故障诊断方法才能满足实时性要求;
(2)对系统动态响应的高精度估计与跟踪是快速故障隔离的前提;
(3)尽管故障时飞机是一个复杂的非线性系统,然而现代飞机在工程实际中仍采用基于局部工作点线性模型的增益调度方法,这被证明是一种有效、成熟、安全的全飞行包线控制技术,因此工程化的故障诊断也可尝试基于线性模型的增益调度方法。
[1] 陈宗基,张汝麟,张平,等.飞行器控制面临的机遇与挑战[J].自动化学报,2013,39(6):703-710.
[2] 杨伟.容错飞行控制系统[M].西安:西北工业大学出版社,2007:6-12.
[3] 周东华,Ding X.容错控制理论及其应用[J].自动化学报,2000, 26(6):787-797.
[4] 董新民.飞行器管理系统[M].西安:空军工程大学出版社,2008:80-106.
[5] 周东华,叶银忠.现代故障诊断与容错控制[M].北京:清华大学出版社,2000:3-15.
[6] Frank P M.Fault diagnosis in dynamic systems using analytical and knowledge based redundancy—a survey and some new results[J].Automatic,1990,26(3):459-474.
[7] Isermann R.Process fault detection based on modeling and estimation methods:a survey[J].Automatic,1984,20(3):387-404.
[8] Morelli E A.Real-time parameter estimation in the frequency domain[J].Journal of Guidance,Control,and Dynamics,2000,23(5):812-818.
[9] Chowdhary G,DeBusk W M,Johnson E N.Real-time system identification of a small multi-engine aircraft with structural damage[J].Journal of Gudiance,Control,and Dynamics,2006,29(3):635-642.
[10] Beard R V.Failure accommodation in linear systems through self-reorganization[D].USA:Department of Aeronautics and Astronautics,MIT,1971.
[11] Julier S,Uhlmann J,Durrant-Whyte H F.A new method for the nonlinear transformation of means and covariances in filters and estimators[J].IEEE Transactiontns on Automatic Control,2000,45(3):477-482.
[12] Ding X C,Frank P M.An adaptive observer based fault detection scheme for nonlinear systems[C]//Proceedings of 12th IFAC World Congress.Sydney,1993:307-312.
[13] Zhang Q.Adaptive observer for multiple-input-multiple-output (MIMO) linear time-varying systems[J].IEEE Transactions on Automatic Control,2002,47(3):525-529.
[14] Jiang B,Wang J L,Soh Y C.An adaptive technique for robust diagnosis of fault with independent effects on system output[J].International Journal of Control,2002,75(11):792-802.
[15] Edwards C,Spurgeon S,Patton R.Sliding mode observers for fault detection and isolation[J].Automatica,2000,36(4):541-553.
[16] Chen W,Saif M,Soh Y C.A variable structure adaptive observer approach for actuator fault detection and diagnosis in uncertain nonlinear systems[C]//Proceeding of the 2000 American Control Conference.USA,2000:2674-2678.
[17] Saif M,Xiong Y.Sliding mode observers and their application in fault diagnosis[M]∥Springer.Springer Tracts in Advanced Robotics:Vol 1.Germany:Springer Berlin Hedelberg,2003:1-57.
[18] Gao Z,Breikin T,Wang H.High-gain estimator and fault-tolerant design with application to a gas turbine dynamic system[J].IEEE Transactions on Control Systems Technology,2007,15(4):740-753.
[19] Tan C P,Cruscab F,Aldeen M.Extended results on robust state estimation and fault detection[J].Automatica,2008,44(8):2027-2033.
[20] 韩冬,朱芳来.基于辅助输出的线性系统状态和未知输入同时估计方法[J].自动化学报,2012,38(6):932-943.
[21] Chen J,Patton R J.动态系统基于模型的鲁棒故障诊断[M].吴建军,译.北京:国防工业出版社,2009:48-83.
[22] Kevin R S,Durham W C.A comparison of control allocation methods for the F-15 active research aircraft utilizing real-time piloted simulate-ons[R].AIAA-99-4281,1999.
(编辑:方春玲)
Present situation and development tendency of fault tolerant flight control applications
WANG Fa-wei, LIAO Kai-jun
(Department of Aeronautical Instrument and Electric Engineering, The First Aeronautical College of Air Force, Xinyang 464000, China)
It is a problem worth of attention to tightly combine the fault tolerant flight control theory with engineering applications. In this paper, the development of the fault tolerant flight control technology in engineering applications is discussed from three aspects, which include the redundancy fault tolerant technology for flight control system itself, the fault tolerant control technology for the controlled object of flight control system, and the fault diagnosis technology which restricts the improvement of the active fault tolerant control. Furthermore, the key technologies and main difficulties are analyzed. Finally, some ideas and suggestions are proposed for the fault tolerant flight control technology development in future.
flight control; fault tolerant control; redundancy; fault diagnosis; robustness
2016-04-08;
2016-09-22;
时间:2016-11-15 10:13
王发威(1987-),男,河南信阳人,讲师,博士,研究方向为导航、制导与控制。
V249.1
A
1002-0853(2017)01-0001-06
猜你喜欢
装备环境工程(2022年9期)2022-10-13
兵器装备工程学报(2021年12期)2022-01-11
高技术通讯(2021年3期)2021-06-09
科技与创新(2021年2期)2021-01-29
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
西北工业大学学报(2018年4期)2018-09-07
科学与财富(2018年1期)2018-03-03
电测与仪表(2017年24期)2017-12-19
舰船科学技术(2017年11期)2017-11-27
