基于Matlab的过程控制系统仿真实验设计
2017-03-02 11:48陈国达李孝禄
实验技术与管理 2017年2期
王 茜, 陈国达, 李孝禄
(1. 杭州电子科技大学 自动化学院, 浙江 杭州 310018;2. 浙江工业大学 机械工程学院,浙江 杭州 310032; 3. 中国计量大学 机电工程学院, 浙江 杭州 310018)
基于Matlab的过程控制系统仿真实验设计
王 茜1, 陈国达2, 李孝禄3
(1. 杭州电子科技大学 自动化学院, 浙江 杭州 310018;2. 浙江工业大学 机械工程学院,浙江 杭州 310032; 3. 中国计量大学 机电工程学院, 浙江 杭州 310018)
针对过程控制系统课程的特点,利用Matlab软件进行了过程控制系统的仿真实验教学研究和开发,给出了基于Matlab软件的过程控制系统仿真实验方案。设计了4个仿真实验,以临界比例度参数整定法为例,给出了实验教学实践过程。该实验教学方法具有简单明了、可操作性强等特点,方便学生课下练习,能够加深学生对过程控制系统设计及系统性能分析等理论知识的理解,提高学生的动手能力及科学素养。
过程控制系统; Matlab软件; 仿真实验教学; 创新能力
过程控制系统是石油、化工、电力等工业生产中以表征生产过程的参数(如温度、压力、流量、液位和成分等)作为被控量,使之接近给定值或保持在给定范围内的自动控制系统[1-3]。过程控制系统是将自动控制原理、过程工艺设计、计算机控制及自动化仪表等知识相结合而构成的一门应用科学,是自动化专业的核心课程[4]。
过程控制系统课程是一门偏向技术应用的自动化专业课程,因此过程控制系统的实验设计环节尤为重要[5-9]。以杭州电子科技大学为例,目前过程控制系统课程共56学时,其中包括12学时的课内实验或基于实验设备的实验。但是,由于学校实验室数量及开放时间有限,难以满足学生利用课余时间开展进一步实验的需求。为此,笔者设计了基于Matlab的仿真实验。教师可以根据课程进度及课程的重点知识来安排Matlab仿真实验,使学生可以在课下针对理论学习及实验过程中发现的问题,进行仿真实验分析。这种实验方式可以锻炼学生通过数学工具来分析和解决问题的能力,同时激发学生的学习兴趣,提高学生动手能力及创新能力。
1 基于Matlab的过程控制系统仿真实验方案
笔者根据课程重点知识,分别在简单控制系统、串级控制系统、前馈-反馈控制系统、比值控制系统的理论课教学之后各安排1次(共8学时)Matlab仿真实验,并布置基于Matlab的仿真实验作业。根据实验作业的难易程度,仿真作业可布置为独立作业或小组作业。理论教学、基于实验设备的实验和基于Matlab的仿真实验相辅相成,三者有机融合,最终获得良好的教学效果。
2 基于Matlab的仿真实验设计
2.1 Simulink建模基本操作
Simulink软件具有仿真和连接两大功能。用鼠标在模块窗口上绘制出所需要的控制系统模型,然后利用Simulink提供的功能来对系统进行仿真和分析[10-12]。
(1) 实验目的。了解Simulink模型的基本结构;了解Simulink模块库;掌握连续模块(Continuous)、数学运算模块(Math Operations)、输入源模块(Sources)及接收器模块(Sinks)等模块的使用方法。
(2) 实验设备。安装有Matlab软件的计算机。
(3) 实验内容。某控制系统的传递函数表示为

用Simulink求它的阶跃输入响应,并将阶跃响应曲线导入Matlab的工作空间中,在工作空间中绘制阶跃响应曲线。
2.2 基于Matlab的串级控制系统仿真
(1) 实验目的。利用Matlab对串级控制系统进行参数整定;利用Matlab分析串级控制系统的抗干扰能力;比较串级控制系统与简单控制系统的区别。
(2) 实验设备。安装有Matlab软件的计算机。
(3) 实验内容。针对管式加热炉出口温度控制系统,分析温度-流量串级控制系统(见图1)克服干扰的过程;构成以加热炉出口温度为主变量、燃料油流量为副变量的串级控制系统。
假设主、副对象传递函数分别为
采用串级控制设计主、副PID控制器,并与简单控制系统进行比较。对串级控制系统进行参数整定。
(4) 实验原理。在系统结构上,串级控制系统有2个闭合回路——主回路和副回路;有2个控制器——主控制器/主调节器和副控制器/副调节器;有2个检测变送器——主检测变送器和副检测变送器。
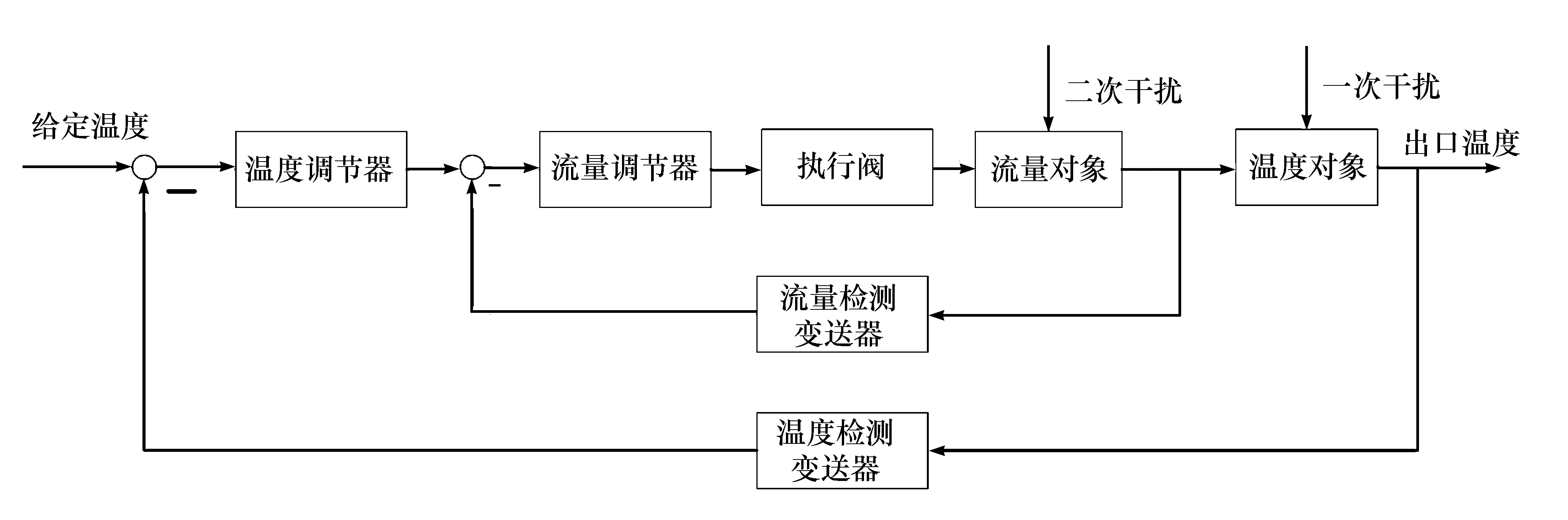
图1 温度-流量串级控制系统
串级系统由于增加了副回路,对进入副回路的干扰具有很强的抑制作用,因此作用于副回路的干扰对主被控量的影响较小。系统的主回路是定值控制,而副回路是随动控制。在设计串级控制系统时,要求系统副被控对象的时间常数要远小于主被控对象。此外,为了提高系统的控制精度,一般主调节器采用PI或PID调节器,而副调节器一般采用比例P控制,以提高副回路的快速响应。串级控制系统的整定有一步整定法,也有两步整定法——先整定副回路,后整定主回路。
串级控制系统由于副回路的存在,改善了控制对象的特性,减小了等效对象的时间常数,提高了系统的工作频率,改善了系统的动态性能,使系统的响应加快、控制及时。同时,由于串级系统具有主、副两只控制器,增大了总放大倍数,增强了系统抗干扰能力。副控制器具有粗调作用,而主控制器具有细调作用,因而控制质量显然高于简单的单回路控制系统。
2.3 基于Matlab的前馈-反馈控制系统仿真
(1) 实验目的。利用Matlab对前馈-反馈控制系统进行参数整定;利用Matlab分析前馈-反馈控制系统的抗干扰能力。
(2) 实验设备。安装有Matlab软件的计算机。
(3) 实验内容。某加热器前馈-反馈控制系统的控制通道和干扰通道的传递函数分别为
假设反馈控制器Gc(s)采用PI控制,选用合适的方法整定该系统并分析前馈-反馈控制系统的抗干扰能力。
(4) 实验原理。前馈-反馈是复合调节系统,选择对象中主要的一些干扰作为前馈信号,对其他引起被调参数变化的各种干扰则采用反馈调节来克服,从而充分地利用了两种调节作用的优点,提高了控制质量。前馈-反馈控制系统框图如图2所示。

图2 加热器前馈-反馈控制系统框图
前馈-反馈控制系统既有前馈校正作用及时的优点,又保持了反馈控制能克服多种扰动及对被控变量进行反馈的长处。整定前馈时,不接入反馈控制。前馈控制的整定方法和静态前馈控制系统相同;反馈控制的整定方法和简单控制系统整定方法相同。
2.4 基于Matlab的单闭环比值控制系统仿真
(1) 实验目的。利用Matlab对单闭环比值控制系统进行仿真分析。
(2) 实验设备。安装有Matlab软件的计算机。
(3) 实验内容。对于比值控制系统,要求副流量跟随主流量变化而变化,其中两流量仪表的信号比值系数为5,其中副对象的传递函数为
设计一个单闭环比值控制系统。
(4) 实验原理。使2个或2个以上参数保持一定比例关系的控制系统称为比值控制系统。单闭环比值控制系统是在开环比值控制的基础上,增加了一个副流量的闭环控制系统。单闭环比值控制系统既可以实现副流量跟随主流量变化而变化,又可以克服副流量本身干扰对比值的影响。单闭环比值控制系统方框图如图3所示[2]。

图3 单闭环比值控制系统
3 实验教学实践
临界比例度法又称Ziegler-Nichols方法,它便于使用,而且在大多数控制回路中能得到良好的控制品质。临界比例度法是在系统闭环的情况下进行的[2],具体整定步骤如下:
(1) 将控制器的积分时间放在最大值(Ti→∞),微分时间放在最小值(Td=0),比例度δ放在较大值后,让系统投入运行。
(2) 逐渐减小比例度,且每改变一次δ值时,都通过改变设定值给系统施加一个阶跃干扰,同时观察系统的输出,直到过渡过程出现等幅振荡为止。此时的过渡过程称为临界振荡过程,δc max为临界比例度,Tk为临界振荡周期。
(3) 利用δc max和Tk实验数据,按表1求出控制器的各个整定参数。将控制器的比例度换成整定后的值,然后依次放上积分时间和微分时间的整定值。

表1 临界比例度法控制器参数计算表
以液位控制系统为例,在参数整定实验中,利用Matlab根据临界比例度法对PID控制器进行参数整定。首先,构建Simulink仿真模型并进行Matlab仿真分析。如果实验时间有限,可以提前让学生搭建Simulink仿真模型(如图4所示),供实验课使用。

图4 系统Simulink模型
其中,控制对象传递函数为
测量装置和调节阀的传递函数为
Gv(s)=1
PID控制器传递函数为
利用临界比例度法整定参数过程为:
(1) 在Simulink中,把反馈连线、微分器的输出连线、积分器的输出连线都断开,将δc max的值从大到小进行实验,每次仿真后,读取示波器的输出,直到出现图5所示的等幅振荡为止,记录此时的δc max=1/30(即Kp=1/δc max=30)和振荡周期Tk=2.81 s。

图5 等幅振荡曲线
(2) 根据表1可知,P控制时,设置比例放大系数Kp=15,仿真运行,得到比例P控制时系统的单位阶跃响应曲线如图6所示。

图6 P控制时系统的单位阶跃响应曲线
(3) 根据表1,当采用PI控制时,设置比例放大系数Kp=13.64;设置积分时间常数Ti=2.39。将积分的输出连线连上,仿真运行,得到PI控制时如图7所示的系统单位阶跃响应曲线。

图7 PI控制时系统的单位阶跃响应曲线
(4) 根据表1,当采用PID控制时,设置比例放大系数Kp=17.65;设置积分时间常数Ti=1.41;设置微分时间常数τ=0.35。将微分器的输出连线连上,仿真运行,可以得到如图8所示的PID控制时系统的单位阶跃响应曲线。

图8 PID控制时系统的单位阶跃响应曲线
由图6、图7和图8可以看出,P控制与PI控制的阶跃响应上升速度基本相同,由于对应的比例系数不同,系统的输出值也不同;且PI控制的超调量比P控制的要小,PID控制比P控制和PI控制的响应速度要快,但是超调量大一些。
由于工程整定方法是根据经验公式,故不是任何情况都适用。采用表1中的经验值整定PID参数的方法具有很大的保守性,因此需要根据实际情况进行一定的调整。由图7可知,按照表1整定的PI控制器参数并不是最佳的。将比例放大系数Kp调整为13.5,积分时间常数Ti设置为12.5,进行仿真,将得到如图9所示的系统阶跃响应曲线。

图9 系统的单位阶跃响应曲线(Kp=13.5,Ti=12.5)
4 教学效果分析
学生在建立Simulink模型后,通过设计PID控制器并对参数进行整定,分析系统的静、动态性能,加深了对过程控制系统相关理论知识的理解。例如:在完成串级控制系统的理论教学后,即安排学生进行基于Matlab的串级控制系统仿真实验和仿真作业。仿真实验既可以在多媒体教室随堂进行,也可以在课下进行,时间自由度较大。学生普遍认为这种基于Matlab的控制系统实验操作性强。教学实践表明:80%~90%的学生可以独立完成实验作业并获得满意的实验效果;而没有获得满意实验效果的学生可以通过与同学或教师讨论、交流后获得满意的实验效果。基于Matlab的过程控制系统实验激发了学生的学习兴趣、促进了学生的相互交流学习、锻炼了学生的动手能力、提高了学生发现问题和解决问题的能力。
5 结语
过程控制系统是一门偏向技术应用的自动化专业课程,实验设计环节尤为重要。过程控制系统是面向大学三年级学生开设的专业课程,而大部分自动化专业学生的毕业设计需要用到Matlab软件对控制系统进行仿真分析。基于Matlab的过程控制系统仿真实验的开设将为四年级学生的工程训练及毕业设计打下重要的基础。
References)
[1] 潘永湘,杨延西,赵跃.过程控制与自动化仪表[M].北京:机械工业出版社,2007.
[2] 薛安克,孔亚广.过程控制[M].北京:高等教育出版社,2013.
[3] 施仁,刘文江,郑辑光,等.自动化仪表与过程控制[M].北京:电子工业出版社,2011.
[4] 侯志林.过程控制与自动化仪表[M].北京:机械工业出版社,2002.
[5] 李国勇.过程控制实验教程[M].北京:清华大学出版社,2011.
[6] 李敏,邹涛,杨马英,等.过程控制系统综合性实验设计与教学实践[J].实验技术与管理,2011,28(6):100-104.
[7] 常艳超,孙娜.过程控制基础课程的教学改革与创新[J].电脑知识与技术,2016,12(9):147-148.
[8] 崔桂敏,贾玉瑛.自动化专业应用型人才培养模式的改革与实践[J].实验室研究与探索,2009,28(11):114-116.
[9] 张月静.过程控制系统课程设计性实验的探索与研究[J].实验室科学,2014,17(4):19-22.
[10] 石良辰.MATLAB/Simulink系统仿真超级学习手册[M].北京:人民邮电出版社,2014.
[11] Bequette B. Process control:modeling, design, and simulation[M].London:Prentice Hall,2003.
[12] 王正林,郭阳宽.过程控制与Simulink应用[M].北京:电子工业出版社,2006.
Design of simulation experiment of process control system based on Matlab
Wang Qian1, Chen Guoda2, Li Xiaolu3
(1. College of Automation, Hangzhou Dianzi University, Hangzhou 310018, China; 2. College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310032, China; 3. College of Mechanical and Electrical Engineering, China Jiliang University, Hangzhou 310018, China)
Aiming at the characteristics of process control system, the simulation experimental teaching of process control system is studied based on the Matlab. The course experiment of process control system is designed based on the Matlab and four examples are given. Besides, the experimental teaching practical process is described by taking the critical proportional method as an example. This experimental teaching method is concise, explicit and strongly operational, which is convenient for the students to practice after class. It can deepen the theoretical knowledge understanding of process control system design and system performance analysis, and improve their operational ability and scientific literacy.
process control system; Matlab software; simulation experimental teaching; innovative ability
10.16791/j.cnki.sjg.2017.02.031
2016-09-07 修改日期:2017-01-06
国家自然科学基金项目(61503105);浙江省教育科学规划项目(2013SCG054);全国工程专业学位研究生教育自选研究课题(2016-ZX-243);浙江工业大学教学改革项目(JG201611)
王茜(1985—),女,吉林长春,博士,讲师,主要从事控制理论的教学和科研工作.
E-mail:wq@hdu.edu.cn
G642
A
1002-4956(2017)2-0119-05
猜你喜欢
天津教育·下(2018年9期)2018-07-13
河北遥感(2017年2期)2017-08-07
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
中国医学影像学杂志(2015年9期)2015-12-15
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
电子设计工程(2014年18期)2014-02-27
电力自动化设备(2013年11期)2013-09-18
电气电子教学学报(2012年1期)2012-10-12