
一种图像抖动下的目标位置测量方法
2017-03-16 03:17李大成杨晓东
兵器装备工程学报 2017年2期
李大成,杨晓东
(海军潜艇学院,山东 青岛 266100)
【信息科学与控制工程】
一种图像抖动下的目标位置测量方法
李大成,杨晓东
(海军潜艇学院,山东 青岛 266100)
根据舰载摄像机获取的图像序列抖动现象,提出了一种基于单目视觉测量技术的运动目标位置测量方法。该方法利用数字图像处理算法提取目标的质心,以灰度投影差值作为特征量估计图像当前帧的抖动矢量,结合摄像机的二维运动模型,计算目标去除抖动后的坐标。将此方法应用于运动轨迹已知的运动目标图像序列,能够去除舰船抖动的影响,获取目标的实际位置,具有很好的稳定性。
单目视觉;灰度投影;抖动
随着机器视觉系统硬件向着小型化和高性能方向发展,以机器视觉为基础的测量技术成为研究的热点[1],视觉测量技术是获取运动目标位置数据和运动参数的重要方法[2],其优点主要表现在测量精度高、实时性好,该技术也不断应用到舰艇的摄像系统。但是舰艇在航行过程中,受到波浪冲击和人为操纵等作用运动状态不断发生改变,导致摄像机获取的图像序列不稳定,无法获知运动目标的准确位置。在舰载摄像系统采集图像过程中,抖动矢量分为平移矢量[3]和旋转矢量[4],旋转矢量一般较小且处理旋转矢量的算法时间复杂度较高,因此主要对平移抖动矢量进行处理。
本研究提出了一种基于单目视觉的目标位置测量方法,利用灰度投影方法去除图像序列不稳定的因素,通过图像处理算法精确测量运动目标的位置。
1 摄像机成像模型和运动模型
图像采集过程中,摄像机的成像模型决定了空间点在世界坐标系的坐标与其在图像像素坐标系坐标之间的对应关系[5]。摄像机将三维空间中的运动物体映射到二维空间,随着目标的运动,在成像平面的位置也发生变化。
假设运动物体的几何参数在同一平面内,且与摄像系统光轴垂直,摄像机仅存在无景深方向平移运动。如图1所示,摄相机坐标系为Oc-XcYcZc,Oc点为摄像机光心,可以在XcYc平面内移动,O-uv为像平面坐标系,像平面坐标系指存储在计算机中数字图像的坐标系,以像素为单位,坐标系原点O位于图像左上角。P为运动目标在三维空间中的点,P1、P2分别为摄像机在不同位置下映射到图像平面上的点,坐标为(x1,y1)、(x2,y2)。
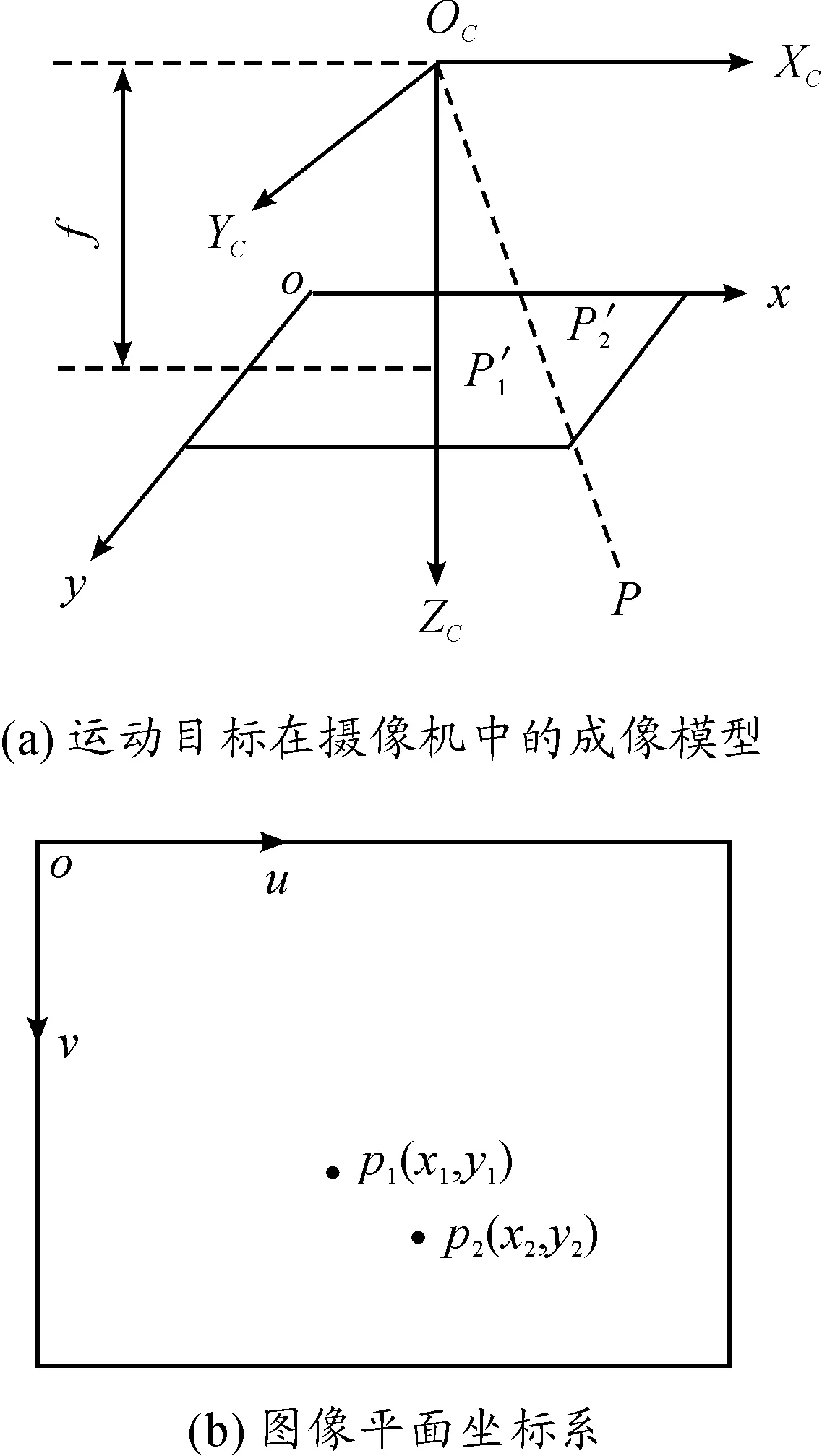
图1 摄像机成像模型和像平面
根据上述模型和条件,假设像平面上的点P1变化到P2过程中,摄像机的位移矢量为(Δx,Δy),则有
(1)
因此,在旋转矢量较小的情况小,可以根据摄像机的平移矢量计算目标在摄像机不发生抖动情况下的像平面坐标。
2 图像抖动矢量估计和目标定位
本研究的数字图像处理主要包括:平移矢量的估计和图像中中心对称目标位置的确定[6]。
2.1 基于灰度投影差值的平移矢量估计
灰度投影算法[7-8]是利用图像的行列灰度变化规律来确定当前帧与参考帧之间的运动矢量,计算量小,对于平移抖动和旋转量较小的抖动具有较高的检测精度。
2.1.1 图像灰度投影
将获得的视频经过简单的图像处理后,将每帧的二维图像(N×M)信息映射成两条灰度投影曲线,具体方法为:
(2)
(3)
colprojk(j)=colk(j)-colTotk
(4)
式中:colk(j)为第k帧图像第j列的灰度值;curk(i,j)为第k帧上 (i,j)位置处的灰度值;colprojk(j)表示第k帧图像的第j列归一化后的灰度映射值。行投影row(i)的计算与列投影的计算方法类似。
2.1.2 投影滤波
当视频发生抖动时,图像的边缘信息会发生明显的变化,图像边缘的行列投影值也会发生明显的变化,使得在互相关计算的计算结果出现较大的偏差。投影滤波的目的就是通过余弦滤波器进行滤波,降低图像边缘信息在计算过程中所占的比重,提高运动矢量的估计精度。
2.1.3 灰度投影差值
两帧图像发生平移抖动时,它们的行列投影曲线保持基本相似的形状。而在不同运动矢量情况下,当前帧和参考帧相同的行列的灰度映射值相差可能会很大,因此可以此作为衡量行或列相似的特征量。也就是说,该行或者列的投影值与参考帧对应行或者列的投影值越接近,表示该行或者列与参考帧的灰度信息越相似。基于此,设定运动矢量范围,并不断移动当前帧的投影曲线分别与参考帧投影作差,具体公式为
(5)

2.1.4 最大列数
根据分析,两帧图像中行或列投影值接近的数目越多,证明两帧图像的灰度信息越相似。设定阈值T来衡量行、列投影值的接近程度,用colk表示当前帧列投影值,colr表示参考帧列投影值。当
(6)
计算符合条件的列数并绘制成曲线图,峰值即代表阈值T条件下的列数最多,其对应的d即为帧的垂直偏移量。求取帧的水平偏移量的方法类似。
2.2 运动目标的定位
形心法和灰度重心法[9-10]是对图像中中心对称目标进行定位的常用方法。形心法将属于同一目标的不同像素点进行平均,将平均值作为目标的位置点。其坐标计算公式为
(7)
(8)
式中:(i,j)为图像像素的纵、横坐标;N为目标图像的总像素;S为属于同一目标的像素。式(7)与式(8)中定义的图像位置由于仅仅利用了目标边界区域的信息,所以该算法的定位精度较低。为了减小形心法定位的误差,采用灰度重心法求取目标的位置,即
(9)
(10)
式中:W(i,j)为权值,一般W(i,j)=I(i,j)。
3 实验与结果
利用如图2所示的实验平台对本文的方法进行实验和仿真,图2(a)为IP摄像头,型号Prosilica_1380,图像分辨率为1 360×1 024,CCD像元尺寸大小为6.45 μm×6.45 μm,最大焦距为35 mm,设置图像采集频率为25fps;图2(b)为运动目标,在圆弧形的玻璃管内装有可以运动的小球,其中摄像头部分和运动目标部分固连在同一载体上。当载体水平倾角变化时,小球在圆弧形玻璃管内运动,通过IP摄像头采集小球的运动图像序列。在实验过程中,摄像头在采集图像时模拟舰船受力致使摄像头小幅度运动,其中大部分力作用在水平方向上,截取图像序列中的200~400帧进行处理。
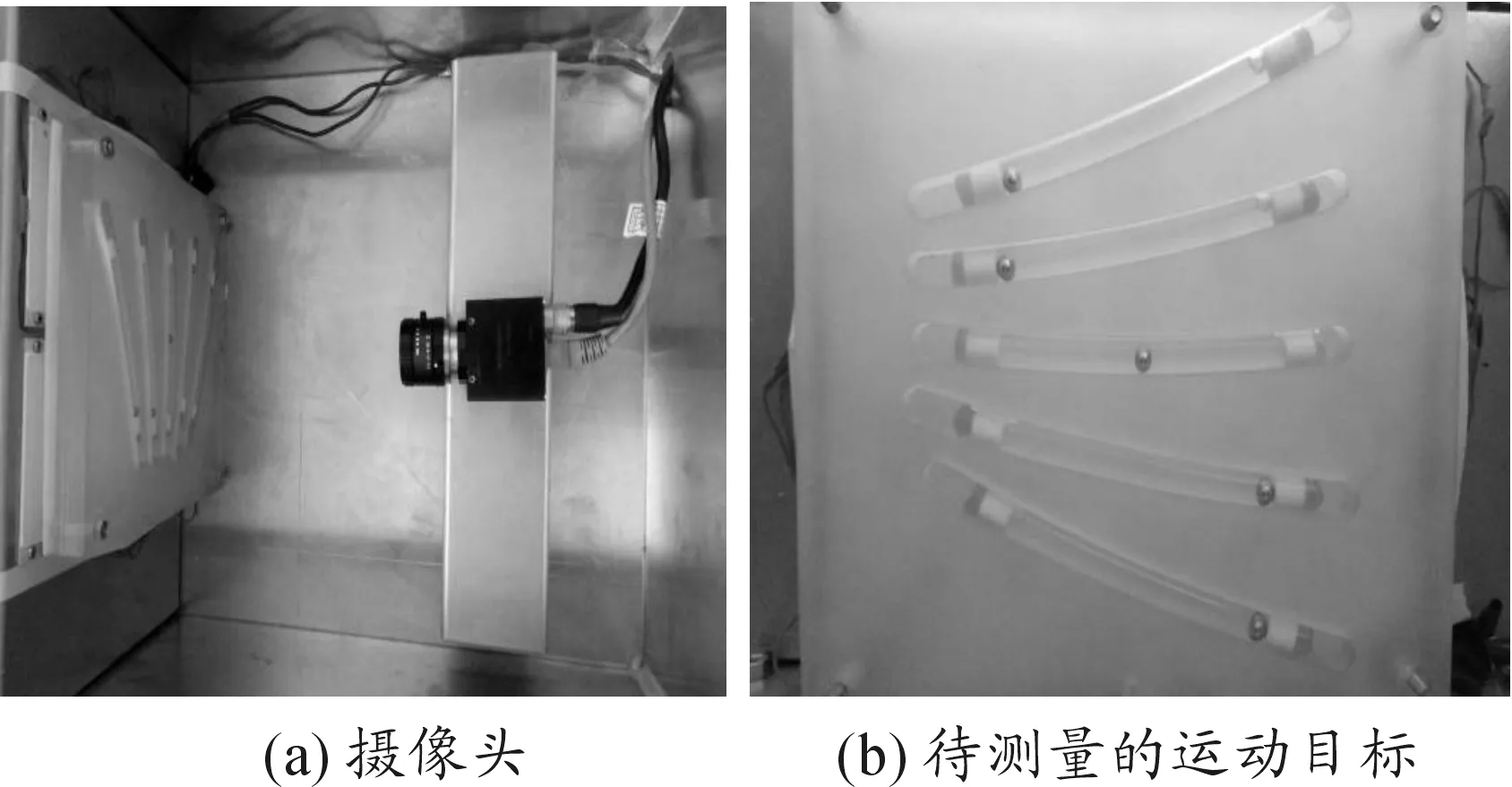
图2 实验平台
首先对采集的图像序列进行图像处理,包括图像灰度化、阈值分割、形态学运算等,检测存在运动状态的目标[11],并利用灰度重心法对目标进行定位,获得目标的坐标。图3所示为经过一系列算法后得到的运动目标二值化图像。
然后以图像序列的第1帧作为参考帧,利用文中提出的基于灰度投影差值算法分别计算当前帧的垂直运动矢量和水平运动矢量,如图4所示,图中横坐标表示帧(frames),纵坐标表示运动矢量(pixels)。

图3 图像处理后的运动目标
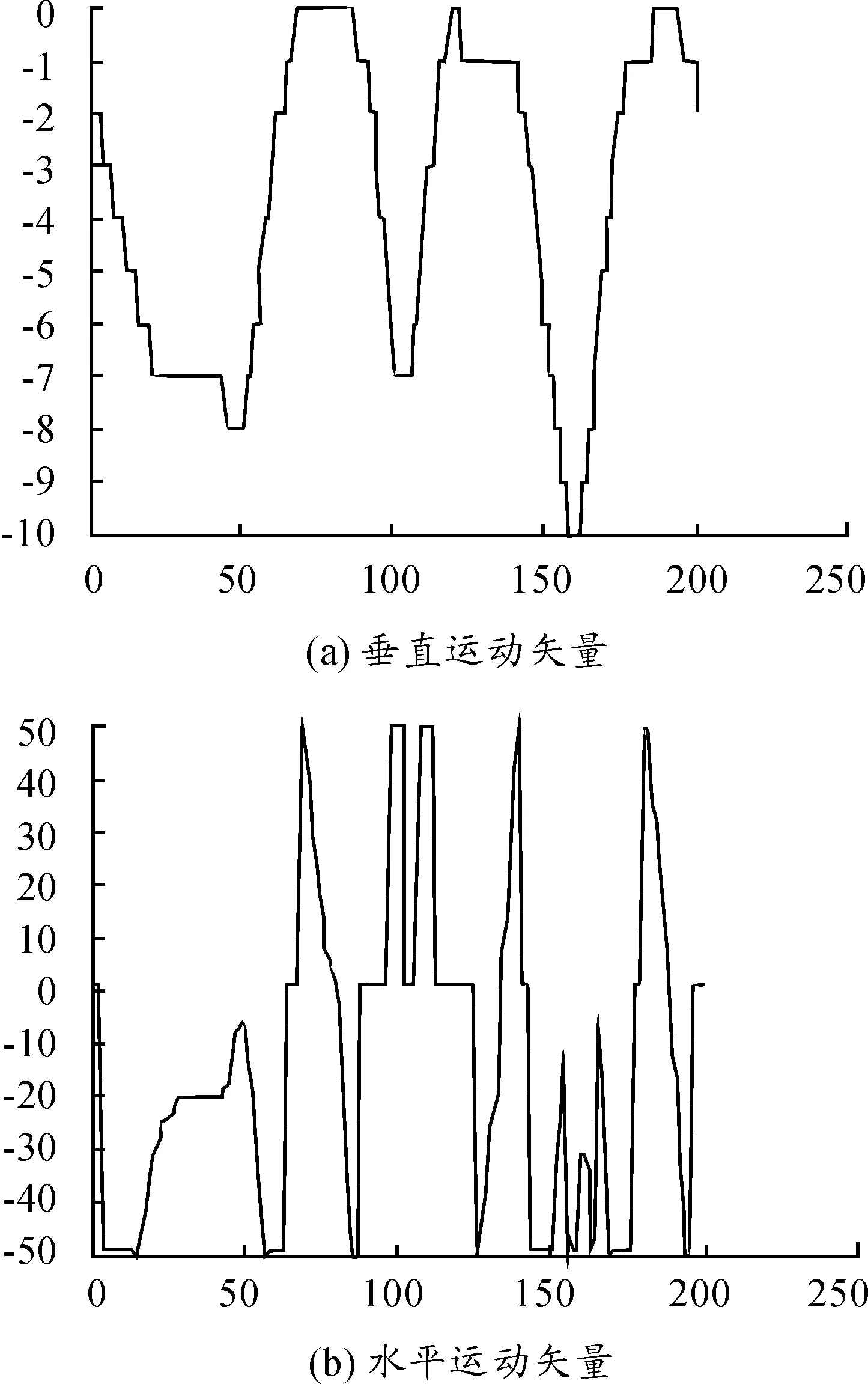
图4 图像序列的抖动矢量
最后利用灰度质心法对目标进行定位,表示目标在图像平面坐标系中的坐标位置。小球运动过程中,以载体水平倾角为0时的小球质心位置作为参考坐标系的原点,以原点位置建立参考坐标系。根据小球运动轨迹的先验性,求得原点在图像坐标系中的坐标为(243.3,182.4)。图5(a)为不考虑摄像头抖动时的目标灰度质心曲线。图5(b)为考虑摄像头运动矢量时通过式(1)计算得到的灰度质心曲线。图5(c)为图5(b)中曲线拟合得到,方程为(x-265.8)2+(y+3 265.1)2=3 448.12,符合运动目标的运动轨迹。由此可见,仿真结果与实际情况基本相似,说明本文的方法可用于摄像机抖动情况下的目标位置测量,且稳定性好。

图5 灰度质心坐标曲线及拟合曲线
4 结束语
利用单目视觉技术对舰载摄像机获取的图像序列抖动下的运动目标位置测量方法展开了研究,用灰度投影差值作为特征量估计出每帧图像的抖动矢量,结合灰度质心法,计算出运动目标去除抖动矢量后的坐标。经过实验验证,能够满足一定环境下的测量需求。
[1] 迟健男.视觉测量技术[M].北京:机械工业出版社,2011.
[2] 温俊,李榕.基于单目的手持式视觉测量方法研究[J].现代电子技术,2015,38(16):88-92.
[3] 赵红颖,金宏.电子稳像技术概述[J].光学精密工程,2001,9(4):3-8.
[4] 赵红颖,晏磊,熊精武.舰船图像序列电子稳定算法的研究[J].光学精密工程,2003,11(6):603-707.
[5] 于起峰.基于图像的精密测量与运动测量[M].北京:科学出版社,2002:148-155.
[6] MORIMOTO C,CHELLAPPA R.Fast electronic digital image stabilization for off-road navigation[J].Real-Time Imaging (S1077-2014), 1996,5(2): 285-296.
[7] 汪小勇,,李奇,徐之海,等.用于实时数字稳像的灰度投影算法研究[J].光子学报,2006,35(8):365-370.
[8] 张朝阳,潘保昌,郑胜林.基于帧差的灰度投影的快速运动物体检测[J].广东工业大学学,2008,25(3):76-80.
[9] 贾云得.机器视觉科学出版社[M].北京:科学出版社,2002.
[10]许联锋.稀疏气泡流动的粒子跟踪测速技术研究[J].水利学报,2005,36(7):824-828.
[11]洪义平.视频序列中运动对象的检测与跟踪[D].大连:大连理工大学, 2002:38-39.
(责任编辑 杨继森)
Research on Target Position Measurement Based on Jitter Image
LI Da-cheng,YANG Xiao-dong
(Naval Submarine Academy, Qingdao 266100, China)
According to the jitter image sequence acquired by ship-borne camera, this paper proposed a moving target position measurement method based on monocular vision. This method firstly used digital image processing algorithms to extract the target centroid. Then it estimated image dithering vector of the current frame with gray projection difference. At last, it calculated the target centroid by combining with two-dimensional motion model of the camera. This method was applied in the image sequence of target. And the trajectory of the moving target is known. It can calculate actual location of the target by removing the effect of ship jitter, and it has a good stability.
monocular vision; gray projection; jitter
2016-09-26;
2016-10-21
海军装备部“十二五”规划资助项目(435515908)
李大成(1992—),男,硕士研究生,主要从事舰艇运动态势视觉测量技术研究;杨晓东(1963—),男,教授,博士生导师,主要从事舰艇机器视觉和航海研究。
10.11809/scbgxb2017.02.022
李大成,杨晓东.一种图像抖动下的目标位置测量方法[J].兵器装备工程学报,2017(2):97-100.
format:LI Da-cheng,YANG Xiao-dong.Research on Target Position Measurement Based on Jitter Image[J].Journal of Ordnance Equipment Engineering,2017(2):97-100.
TP751.1
A
2096-2304(2017)02-0097-04
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
航空世界(2018年12期)2018-07-16
办公自动化(2016年18期)2016-12-17
办公自动化(2016年18期)2016-08-20
新高考·高一物理(2016年1期)2016-03-05
新闻前哨(2015年2期)2015-03-11
