
冰箱压缩机活塞运动的模拟仿真分析
2017-03-19 01:36蔺绍江戴竞雄何国庚
流体机械 2017年12期
李 顺 ,蔺绍江 ,戴竞雄 ,何国庚
1 引言
LJ63XZ系列冰箱压缩机属于往复式压缩机。曲轴在单相交流异步电机的驱动下做匀速转动,曲柄销带动连杆大头做圆周运动,连杆小头伴随活塞在气缸体的约束下做往复的直线运动。为了提高压缩机的COP值(制冷效率),曲轴转速比较快,与之相对应的连杆活塞也快速运转。工作状态下,冰箱压缩机的曲轴连杆活塞机构作往复运动,其在极限位置承受较大的加速度,同时该类机构要长时间“永无休止”地运转,而且,随着人们对家电舒适性要求的提高,降低该类机构的振动和噪音显得异常重要[1],这对受力件的强度和耐磨性能提出了越来越高的要求。
本文以LJ63XZ系列冰箱压缩机的曲轴连杆活塞机构作为研究对象,采用SolidWorks软件、MATLAB软件开展压缩机的曲轴连杆活塞机构的运动模拟仿真分析,以期为冰箱压缩机机构运动受力与摩擦磨损的深入分析与研究提供基础数据和理论参考。
2 冰箱压缩机的工作原理
压缩机是冰箱制冷系统的心脏,它从吸气管吸入低压低温的制冷剂气体之后,在压缩机活塞的工作容积里进行压缩后变成高压高温的制冷剂气体,再经过冷凝器对制冷剂气体进行散热冷凝[2],通过节流装置的毛细管进行节流减压,就变成了低压低温的制冷剂气体,最后通过蒸发器与外界需要降温的媒介进行一个换热的过程,从而达到一个制冷的效果。冰箱是利用物态变化过程中的吸热现象,使制冷剂气液循环,不断地吸热和放热,进而达到制冷的目的。冰箱的基本制冷原理如图1所示,其具体过程是:通电后压缩机工作,将蒸发器内已吸热的低压、低温气态制冷剂吸入,经压缩后,形成高压、高温蒸气,进入冷凝器。由于毛细管的节流,使压力急剧降低。因蒸发器内压力低于冷凝器压力,液态制冷剂就立即沸腾蒸发,吸收箱内的热量变成低压、低温的蒸气,再次被压缩机吸入。如此不断地循环,进而将冰箱内部热量不断地转移到箱外去[3]。
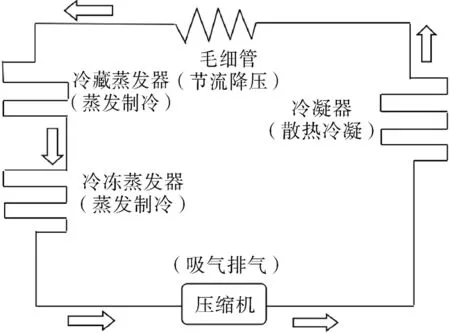
图1 冰箱压缩机工作原理
3 LJ63XZ系列压缩机三维模型的建立
根据LJ63XZ系列压缩机各零部件规格,修改各零部件草图的尺寸,达到LJ63XZ系列压缩机的要求,然后开始装配。在SolidWorks里新建装配体文件LJ63XZ.SLDASM,采用自下而上的装配步骤来装配整个压缩机的零部件。首先将气缸体导入SolidWorks软件中(默认第一个导入的零件是固定的),将下止推垫片进行旋转平移后放至气缸体之上,并设置下止推垫片与曲轴所在气缸体中的圆柱体工作空间的同心约束条件,朝着气缸体移动下止推垫片,设置气缸体与下止推垫片在碰撞时停止的接触条件;导入中止推垫片,设置与下止推垫片同心且碰撞时停止的约束条件;导入平衡架,设置与中止推垫片同心且碰撞时停止的约束条件;导入上止推垫片,设置与平衡架同心且碰撞时停止的约束条件;导入曲轴,并设置曲轴的中心轴与上止推垫片同心的约束条件,曲轴与上止推垫片碰撞时停止的接触条件;导入平衡块(使曲轴处于动平衡的状态,有利于减少曲轴的振动,进而达到一个降噪的效果)和螺钉(将平衡块固定在曲轴上),设置同心等约束条件,移动平衡块至和曲轴碰撞时停止;导入连杆,设置连杆大头与曲柄销同心的约束条件;同理,导入活塞、活塞销(用于连接连杆与活塞)、弹性销(用于连接活塞与活塞销),设置活塞与其在气缸体中的圆柱体工作空间的同心约束条件;设置活塞、活塞销和弹性销的同心约束条件,形成活塞组件;设置连杆小头与活塞销的同心约束条件。设置完各零部件间的配合关系之后,对整个装配体进行干涉检查,确保压缩机各零部件正确的装配关系。装配完成之后整个压缩机三维模型,如图2所示。
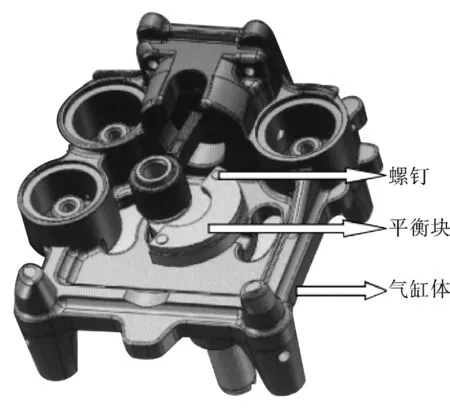
图2 压缩机三维模型
为了清楚表达装配关系和后续曲轴、连杆、活塞的二维数学模型建立,将曲轴、连杆、活塞等零部件单独绘制,如图3所示。
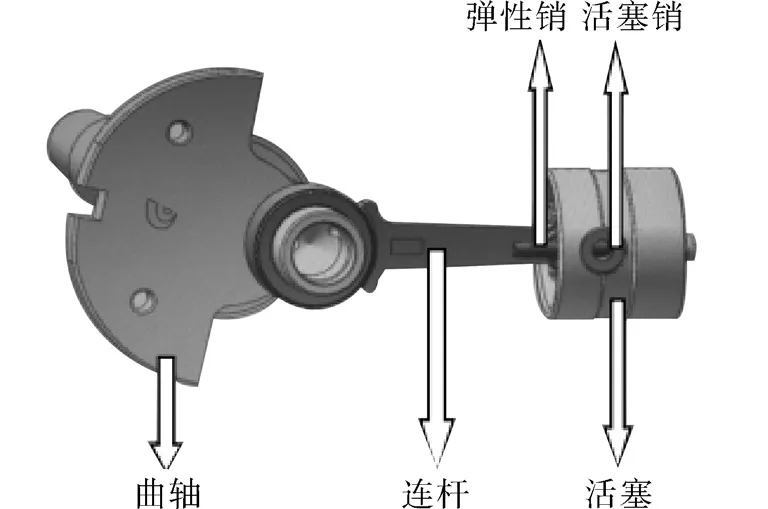
图3 曲轴-连杆-活塞三维模型
确保装配关系无误后,在运动算例里给曲轴增加旋转马达,设置旋转马达属性为:3600 r/min,顺时针旋转[4]。
4 活塞运动规律分析
在压缩机稳定工况工作情况下,视曲轴的运动为等角速度的旋转。曲轴跟随电机以3600 r/min的转速顺时针运动,即角速度为ω=120π rad/s,根据LJ63XZ系列压缩机各零部件规格,连杆大小头中心距为L=40.462 mm,曲轴偏心距为R=8.35 mm,在装配体中测得曲轴和活塞的中心距为h=2.7 mm。O'为活塞的起点,此时曲轴转角α=0。其中,活塞在气缸体的约束下在图4上的水平虚线上运动。x为曲轴转过一定角度α后产生的水平位移。
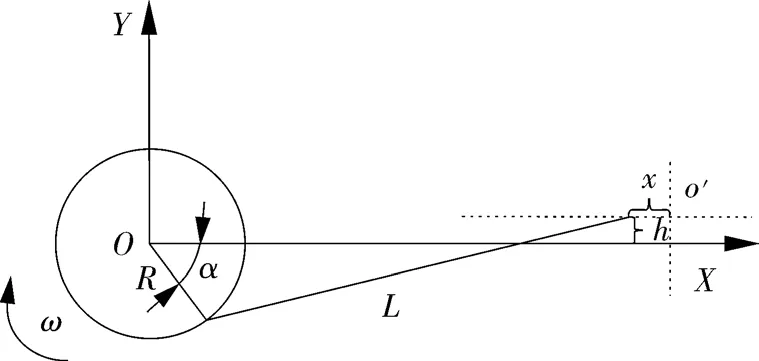
图4 曲轴连杆活塞运动示意
常用的活塞式压缩机曲轴中心线与活塞中心线在一条直线上,这一类的曲轴连杆活塞机构的运动模拟仿真技术已经比较成熟,在参考文献[1]中,作者对内燃机的曲轴、连杆、活塞机构进行了理论和实际的分析,非常具有参考意义。而这样设计存在一个严重的问题,当α=0时,活塞力等于连杆力,此时如果压缩机运行工况不佳,连杆和曲拐很可能会因为力矩在一条直线上而造成压缩机启动失败。而LJ63XZ系列压缩机采用曲轴偏移活塞中心线2.7mm的方法来解决这个问题[5]。在此,借鉴前人对曲轴、连杆、活塞机构的运动模拟仿真分析的数学建模思维,建立以LJ63XZ系列压缩机的曲轴、连杆、活塞机构为基础的运动模拟仿真分析的二维数学模型。将图3所示曲轴、连杆、活塞三维模型简化为二维数学模型,如图4所示。
4.1 活塞位移方程及变化曲线
根据曲轴转角为0和α时,分别计算R和L在X轴上的投影,几何关系式如下:

因此,活塞位移方程为:

在MATLAB软件中利用plot函数绘制出活塞位移随曲轴转角变化的关系,如图5所示。利用fminbnd函数,,求出在一个周期内α=6.2831 rad(即:α=359.9951°)时,活塞位移取得最小值x=-3.3823×10-5mm;同样,利用fminbnd函数对(-x)求最小值,得到α=3.1969 rad(即:α=183.1689°)时,x函数取得最大值16.659 mm,对应活塞达到其下止点。因此,α在0~3.1969 rad和6.2831~6.2832(2π取6.2832)rad时,活塞从上止点向下止点运动;3.1969~6.2831 rad时,活塞从下止点向上止点运动活塞运动到此处为其上止点[6]。在实际测量中,活塞运动到上止点时,活塞工作容积内压强可达到2.5至3 MPa。在机构静力学分析中拟采用活塞上止点作为参考点进行研究。因此,本文分析活塞在上止点时的位移、速度、加速度等情况。
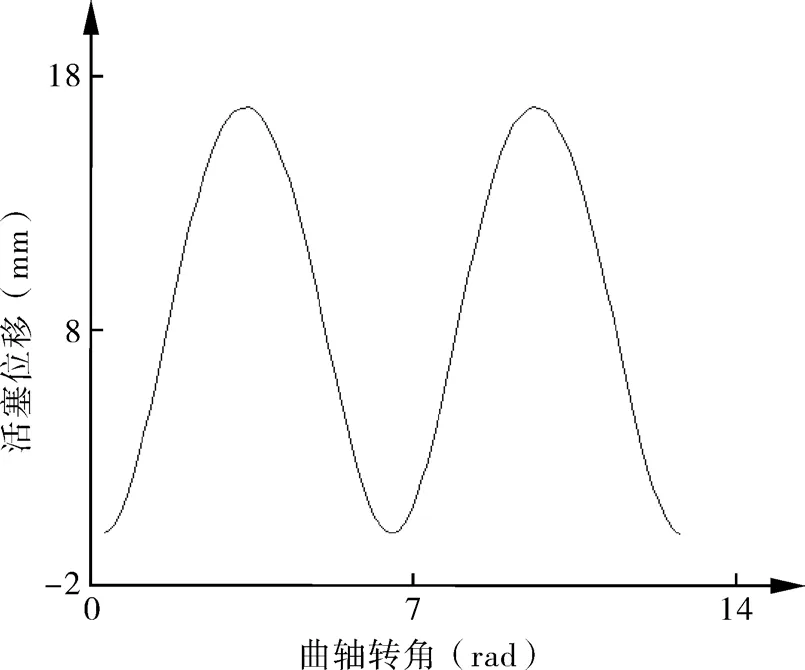
图5 活塞位移曲线
4.2 活塞速度方程及变化曲线
活塞速度v是活塞位移x对时间的一阶导数,因此活塞速度方程为:
在MATLAB软件中,为节省输入活塞速度方程的时间和繁琐步骤,直接对活塞位移x求一阶导diff(x,α),得到活塞速度方程v,进而利用plot函数绘制出活塞速度v随曲轴转角变化的关系图,如图6所示。在α=3.1969 rad时,v=0,此时活塞开始改变运动方向,由下止点开始向上止点运动。在活塞上止点时刻,α=6.2831 rad时,可以求出活塞运动到上止点处的速度为v=-210.2102 mm/s。

图6 活塞速度曲线
4.3 活塞加速度方程及变化曲线
活塞加速度α是活塞位移x对时间t的二阶导数,因此活塞加速度方程如下:

在MATLAB软件中,对活塞位移x求二阶导diff(x,α),得到活塞加速度方程α,利用plot函数绘制出活塞加速度α随曲轴转角变化的关系图,如图7所示。α在0~3.1969 rad时由大变小,3.1969~6.2832 rad时由小变大。在活塞上止点时刻,α=6.2831 rad时,可以求出活塞运动到上止点处的加速度为α =1.4333.3823×106mm/s2[7]。
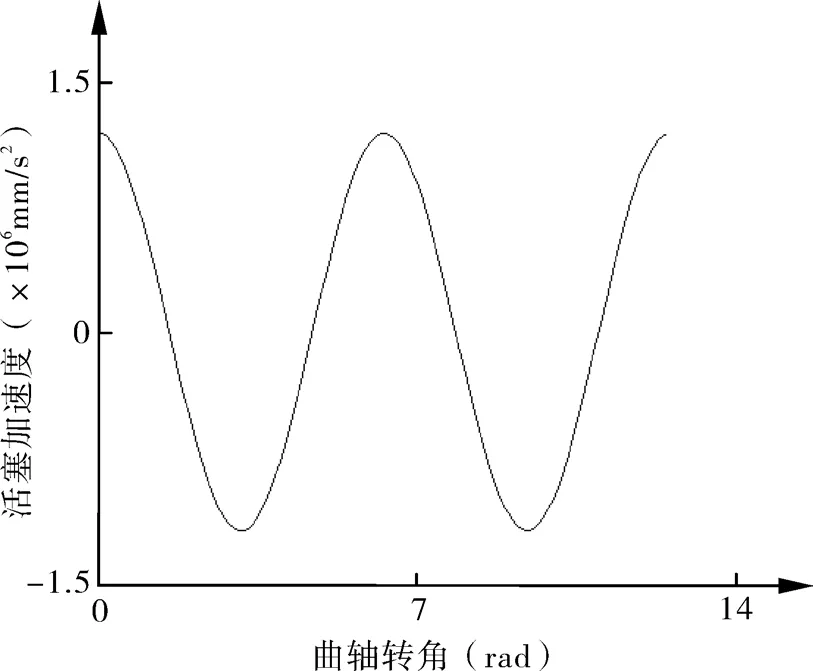
图7 活塞加速度曲线
4.4 活塞运动规律分析
活塞从上止点向下止点方向运动时,活塞工作容积内的剩余高压气体开始膨胀,膨胀完毕后进气阀开启,直至接近活塞下止点时,进气完毕;活塞由下止点向上止点运动,进气阀和排气阀均处于关闭状态,直至接近上止点时,工作容积内的压强足以使排气阀开启,活塞端面所受压强达到极值[8]。
结合上述活塞运动曲线和实际活塞在工作容积内所受压强的变化情况,可以得出活塞端面在其上止点时所受压强可能最大,此时,传递到连杆和曲轴的应力也有可能最大,极有可能出现零部件磨损比较严重的现象。并且结合上述求得活塞在上止点时刻的所受压强及位移、速度、加速度三个值可以得出各零部件的惯性力,此时,活塞端面受到来自工作容积内高压强的气体力和电机通过曲轴连杆传递给活塞的作用力;压缩机排气过程,连杆受到压力作用,吸气过程,连杆主要受到拉力作用,活塞上止点处于压缩气体的状态,可以知道此时连杆受到压力作用;曲轴主要受到来自交流异步电机的力矩作用和连杆给其的相互作用力。综上所述,活塞运动到上止点处的加速度达到最大值,并且活塞端面在接近其上止点时所受压强最大,此时,传递到连杆和曲轴的应力相应达到极值,因此在活塞运动的上止点极有可能会面临较大的应力和磨损工况,选用活塞在上止点的时刻作为研究零部件受力分析和摩擦磨损情况分析具有代表性。
5 结语
本文采用SolidWorks软件建立了LJ63XZ系列冰箱压缩机的三维模型,并在MATLAB软件中开展活塞的运动模拟仿真,得出其位移、速度、加速度相对于曲轴转角的运动方程。然后对活塞的位移、速度、加速度的运动方程进行理论分析,并分别作出随曲轴转角变化的变化曲线,并计算出此时活塞此刻的位移、速度、加速度,分析其变化情况,得出活塞在运动到其上止点时,可能面临着应力集中现象和严重的摩擦磨损工况,为冰箱压缩机机构运动受力与摩擦磨损的分析与研究提供理论参考。
[1] 连萌.基于SolidworksMotion的内燃机活塞运动规律分析[J].黄河水利职业技术学院学报,2015,27(2):34-37.
[2] 宋鹏.冰箱用微细管路冷凝器理论和实验研究[D].北京:北京工业大学,2010:15-17.
[3] 卢智利.直冷式多路循环冰箱特性研究[D].上海:上海交通大学,2006:72-74.
[4] 任柏林.Solidworks环境下机械传动的运动模拟[J].湖北汽车工业学院学报,2009,23(3):41-43.
[5] 管志俊.冰箱压缩机曲轴偏移活塞中心线的设计方法[J].机械制造,2013,51(588):37-38.
[6] 林翠青.基于曲柄压力机中曲柄滑块机构的运动分析及其研究[J].数字技术与应用,2010,(7):67-68.
[7] 王智兴.基于Matlab的工业机器人运动学分析与仿真[J].机电工程,2012,29(1):33-37.
[8] 陈楠.活塞式制冷压缩机PV图测试系统研究[D].杭州:浙江工业大学,2011:21-24.
[9] 宋春青.车用空压机曲轴连杆机构的动力学分析与仿真[D].武汉:武汉理工大学.2009:14-51.
猜你喜欢
福利中国(2022年3期)2022-07-20
电机与控制应用(2022年4期)2022-06-27
音乐天地(音乐创作版)(2021年7期)2021-10-13
河北画报(2020年3期)2020-06-24
河北画报(2020年5期)2020-06-10
新乡学院学报(2016年6期)2016-12-01
中华骨与关节外科杂志(2016年3期)2016-05-17
橡胶工业(2015年8期)2015-07-29
汽车零部件(2014年8期)2014-12-28
自然资源遥感(2014年2期)2014-02-27
