
一种基于系统保形解耦的力源识别方法
2017-05-04 03:00王淑娟王国巧沈继红韩伟民
船舶力学 2017年1期
王淑娟,王国巧,沈继红,韩伟民
(哈尔滨工程大学 理学院,哈尔滨150001)
一种基于系统保形解耦的力源识别方法
王淑娟,王国巧,沈继红,韩伟民
(哈尔滨工程大学 理学院,哈尔滨150001)
基于模态分析法的力源时域识别方法中涉及利用模态矩阵将系统方程转化为非耦合形式,这仅对比例阻尼或经典阻尼系统才能实现。文章基于二阶系统保结构解耦方法建立了新的力源识别数学模型。首先利用Lancaster结构建立系统的解耦模型,并求得解耦变换;其次,利用解耦变换推导建立系统非耦合响应模型,并在微小时段内力源为线性变化的假设下,推导出具体的力源识别公式。最后,采用精细逐步积分方法,对模型进行解算,由结构动态响应反求力源的时间历程。数值实验不仅验证了所提方法可以提高识别精度,而且也验证了所提方法对非比例阻尼系统也是有效的,这也是文中方法的重点。
Lancaster结构;解耦;精细逐步积分;线性假设
0 引 言
力源识别是根据已知系统的动态特性和实测的动力响应反算结构所受的激励,是一个较难的问题,但又是结构动态设计的关键之一。力源识别问题的研究在各个工程领域都具有重要的意义,如随着IMO组织对船舶噪声尤其是舱室噪声的要求越来越严,机电设备作为船舶主要的激励源,其振动控制越来越受到人们的关注。设备的低噪声设计是解决设备振动问题的最根本方法,而力源识别又是设备低噪声设计的前提条件之一。
力源识别方法分为频域法和时域法。频域法发展较早,计算方法较为成熟,精度较高。此方法可确定力谱的均值与方差,但对于力的时间历程还有一定困难,特别是可能会出现奇异值和不稳定现象。而时域识别是20世纪80年代中期发展起来的一种方法,直接依据结构的响应时程来识别未知力源的时间历程,便于工程应用,受到工程界的欢迎。其中现有的一类力源时域识别方法利用结构的模态模型将系统方程转化为非耦合形式建立反演模型,具有一定的工程应用价值。
Desanghere等[1]、Ory等[2]于1985年首次将模态坐标变换方法引入到动态力源时域识别过程中,将运动微分方程转化为非耦合方程形式,将实际载荷的反演转化为对模态力的反演,在微小时间间隔内力源为阶跃力的假设下,推导出已知系统响应等条件下的力源反演公式。唐秀近等[3-4]提出基于模态分解Duhamel积分的一种较为有效的时域载荷识别模式,并较为系统地对该方法的识别精度、模态截断的影响作了初步的研究。初良成等[5]利用正分析的手法来求解反问题,建立了阶跃力假设下的时域载荷识别新方法,克服了识别精度受测量信息数目限制的缺点。徐倩等[6]应用精细逐步积分建立了一种基于阶跃力假设下的力源识别模式,由结构动态响应求出动态力的时间历程。张运良等[7]在微小时段内力源为线性变化的假设下,推导了仅由结构的一种响应(位移、速度或加速度)进行力源识别的递推连锁计算公式,以便于实际应用。
这一类力源识别方法无论是阶跃力还是线性力假设,在最初都是利用模态坐标变换将系统多自由度微分方程转化为非耦合形式,然后建立具体的反演公式。但利用坐标变换将三个系数矩阵同时对角化,且仅当比例阻尼或经典阻尼系统才能够实现,这就使得算法的应用受到了限制。数值代数领域认为,通过主坐标变换来实现三个矩阵的同时对角化一般是无法实现的,因此本文将力源识别中涉及的三矩阵同时对角化转化为Lancaster扩展系统的块阵同时对角化,建立系统解耦模型,求得相应解耦变换,并通过理论推导建立系统的非耦合方程表示形式。最后,在微小时间段线性力假设下推导出力源时域识别公式,并利用精细逐步积分进行模型计算。本文数值试验将涉及无阻尼系统和比例阻尼系统,验证本文方法较现有基于模态分析载荷识别模型精度高;并将利用两组船舶运动数据验证本文提出算法对非比例阻尼系统也适用,且精度较满意。
1 基于模态分析法的力源识别模型
一个n自由度二阶系统往往可由下式来描述:

其中:M、C、K和F分别表示为质量矩阵、阻尼矩阵、刚度矩阵和外力向量。由实测或有限元分析可得系统的模态参数:固有频率ωr、阻尼比ξr及模态矩阵Φ,其中,利用模态矩阵做变换x(t)=Φq(t),得

左乘矩阵ΦT

若上式为无耦合方程,设Φ= [Φ1,Φ2,…,Φn]则可写成分解式

其中:r=1,2,…,n,qr(t)为第r阶模态坐标。设(2)式右端项为fr(t),将(2)式降阶为一阶微分方程


其中:[T(τ)]=eHτ,τ=t-tj,{vp(t )}为方程(3)的特解[5]。利用精细逐步积分法计算指数矩阵 [T (τ)][5],便可得模态坐标qr(t)与外力源F(t)之间的关系式。再由x(t)=Φq(t)推导出结构位移响应x(t)与外力源F(t)的关系,进而实现由结构响应反向推导力源。
显然,从(1)式到(2)式的转变意味着主坐标变换x(t)=Φq(t)将三个矩阵M、C、K同时对角化,将多自由度系统简化为多个单自由度子系统,这个过程也被称为二阶系统解耦[8]。众所周知,当M和K都为对称阵,且其中之一为正定阵时,广义特征值分解可实现M和K的同时对角化,相关的研究方法已经很成熟[8]。三个矩阵的同时对角化不仅要求M、C、K同为对称阵和某个矩阵为正定阵,还需要满足KM-1C=CM-1K,但这个条件是很难满足的,因此工程上涉及到二阶系统解耦只能在比例阻尼的假设下实现[8]。
目前数值代数领域利用Lancaster解耦来研究二阶系统的解耦问题,将三个矩阵同时对角化转化为Lancaster扩展系统块阵同时对角化,已证明几乎所有二阶系统都可以通过这样的方式实现解耦。文献[8]详细地研究和介绍了这一问题,并提出基于Sylvester方程的解耦变换求解方法。本文将利用基于Lancaster结构的二阶系统解耦方法建立新的力源识别模型,利用解耦变换通过理论推导建立系统受力相应模型,假设力源在微小时间段内成线性变化的前提下推导力源计算公式。
2 基于系统解耦的力源识别模型建立
2.1 基于Lancaster结构的系统解耦
显然,当M可逆时(1)式与(4)式对应的特征值问题等价,


左乘可逆矩阵Πl得

若Πr、Πl可实现(4)式系数矩阵的块阵同时对角化,便将(4)式转化为

其中:MD、CD和KD为对角矩阵。显然,(5)式与(4)式对应的特征值问题等价,若设代入

(6)式即为(1)式所描述原始二阶系统的非耦合形式。
2.2 基于精细逐步积分的力源计算

且MDr表示对角阵MD对角线上第r个元素,表示矩阵l11第r行第i列所对应的元素)表示矩阵l21第r行第i列所对应的元素。将(6)式降阶为一阶微分方程
取等间距积分步长τ=tj+1-tj,利用tj时刻的值计算tj+1时刻,令s=tj+ξ,则上式可改写为

其中:[T (τ)]=eHτ为指数矩阵,利用精细积分方法计算[8-10]。
假设在时间步长 (tj, tj+1)内力r(t)呈线性变化,即

其中:ξ∈ (tj, tj+1),{r1}和 {r2}在区间 (tj, tj+1)内为时不变向量,且有

则将(10)式代入(9)式,整理可得线性力源精细积分格式

式中:Tij表示矩阵 [T (τ)]的第i行第j列,其余类推。
2.3 基于线性力假设的力源识别公式
假设在时间步长 (tj, tj+1)内,力源f(t)是线性变化的,即
则有

将上式一阶导代入(7)式,再将(7)式代入(11)-(12)式,整理得
将上式中第2个式子整理得出fi(tj+1)的表达式代入第1个式子,就可以得到fi( tj)的表达式,从而求解得力源的数值解。
3 算 例
例1针对文献[6]中涉及的两自由度无阻尼系统

进行模型仿真计算。首先利用文献[8]中的方法构造解耦后系统参数矩阵MD和KD,并利用基于Sylvester方程的解耦变换求解方法计算得解耦变换Πr、Πl。然后利用Πr、Πl获得如(6)式所示的系统非耦合形式。最后在线性力源假设下,取时间步长△t=0.28,利用(13)式计算得力源估计值。表1给出了本文方法与文献[6]中方法计算的力源估计值,由表中数据可知本文提出的基于系统解耦的力源识别方法精度较高,具体模型计算的绝对误差如图1所示。
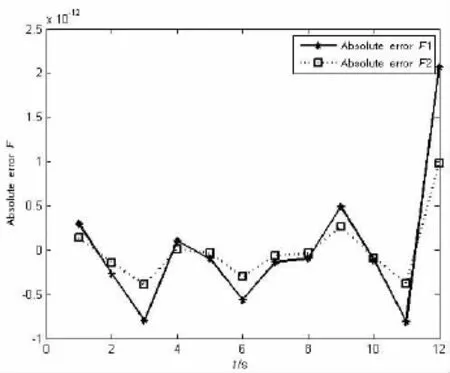
图1 基于系统解耦力源识别绝对误差Fig.1 The absolute error of load identification based on decouplingmethod

表1 两自由度系统力源识别计算结果Tab.1 Calculation result of dynam ic load identification for two DOF system
例2本例将对一船舶振动系统进行力源识别估算,且该力源为动态力,具体系统方程如下:

很显然,该系统为比例阻尼系统,因此既可以利用模态分析法获得系统非耦合形式,也可以利用本文方法进行获得系统解耦形式,下面将给出基于这两种方法的力源识别模型计算情况。同样选取时间步长τ=0.02,图2(a)给出了本文方法计算的力源估计值和真实值曲线,可以看出估计值与真实值基本吻合,图2(b)则给出了本文方法的误差曲线;图2(c)给出了基于模态分析法的力源估计值和真实值曲线,图2(d)则给出了基于模态分析法的力源估计误差曲线;从图2(b)和图2(d)的幅值比较来看,本文方法精度较高。

图2 (a) 基于系统解耦力源识别计算值与真值比较曲线Fig.2(a)The comparation between the calculated value and the real value of load identification based on decouplingmethod

图2 (b) 基于系统解耦力源识别绝对误差曲线Fig.2(b)The absolute error curve of load identification based on decouplingmethod

图2 (c) 基于模态法力源识别计算值与真值比较曲线Fig.2(c)The comparation between the calculated value and the real value of load identification based onmodal identification

图2 (d) 基于模态法力源识别绝对误差曲线Fig.2(d)The absolute error curve of load identification based onmodal identification
例3本例将对文献[8]中水池实验获得的船舶运动系统数据进行力源识别,所涉及船舶质量为425 t,船长为60m,船舶浪向角为0°,其中共测得18 kns和27 kns航速下各20个遭遇频率的舰船纵摇—升沉运动数据。
已知船舶运动系统为非比例系统,因此,无法利用模态分析法获得系统的非耦合方程。利用本文提出的力源识别方法,选取迭代步长τ=0.02进行解算,下面将给出两组不同航速下不同遭遇频率下的力源识别结果,图3和图4分别给出了计算值与真实值对比图,以及相应的绝对误差曲线图。实验验证了此方法对非比例阻尼系统同样适用。
(1)航速18 kns遭遇频率Ome=0.889:

(2)数据2:航速27 kns遭遇频率Ome=0.945:

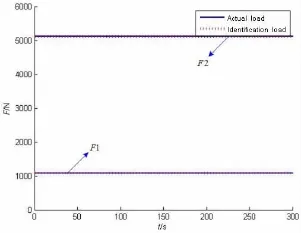
图3 (a)力源识别计算值与真值对比图(Ome=0.889)Fig.3(a)The comparation between the calculated value and the real value of load identification(Ome=0.889)
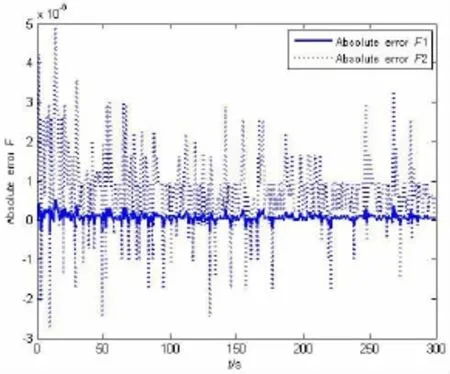
图3 (b)力源识别绝对误差曲线图(Ome=0.889)Fig.3(b)The absolute error curve of load identification(Ome=0.889)

图4 (a)力源识别计算值与真值对比图(Ome=0.945) Fig.4(a)The comparation between the calculated value and the real value of load identification(Ome=0.945)

图4 (b)力源识别绝对误差曲线图(Ome=0.945)Fig.4(b)The absolute error curve of load identification(Ome=0.945)
4 结 论
动态载荷的确定在结构的分析与研究中意义重大,准确地识别动态载荷是工程结构可靠性与安全性的重要保证。然而在工程实行中,常常是很难对作用于结构的外载荷作直接测量和计算。因此,对动态载荷的确定只能从可测的系统响应信息来间接地确定。由于其广泛的工程背景和明显的应用价值,使这一问题的理论和应用成为研究的热点。
本文把现有一类载荷时域识别方法涉及到的解耦问题作为切入点,将基于Lancaster结构的二阶系统解耦方法应用于系统动力学方程解耦中,并利用解耦变换通过数学理论推导提出了基于系统解耦的载荷识别数学模型,最后采用精细时程积分法进行模型计算。本文提出的模型一方面克服了模态分析法只适用于比例阻尼系统解耦的问题,另一方面从数值试验来看,针对比例阻尼系统的力源识别精度要高于现有方法,而针对非比例阻尼系统该方法仍然有效。基于Lancaster结构的二阶系统解耦方法是数值代数领域的前沿研究之一,一直处于理论研究的阶段,因此本文方法也是数学理论研究在工程应用中的一个尝试。
参 考 文 献:
[1]Desanghere G,Snoeys R.Indirect identification of excitation foreces bymodal coordinate transformation[C]//Proceedings of the 3rd IMAC.Florida,USA,1985:685-690.
[2]Ory G,Glaser H,Hlzdeppe D.The reconstruction of force function based on aeroelasticity and structural dynamics[M]// Proceedings of 2nd International Symposium On Aeroelasticity and Structural Dynamics.Aschen,FRG,1985:164-168.
[3]唐秀近.动态力识别的时域方法[J].大连工学院学报,1987,26(4):21-27. Tang Xiujin.Dynamic load identification by time domainmethod[J].Journal of DaLian Institute of Technology,1987,26 (4):21-27.
[4]唐秀近.时域动态载荷识别的精度问题[J].大连理工大学学报,1990,30(1):31-37. Tang Xiujin.Precision problems of dynamic load identification in time domain[J].Journal of DaLian University of Technology,1990,30(1):31-37.
[5]Chu Liangcheng,et al.Dynamic load identification in time domain[J].China Ocean Engineering,1990,5(3):279-286.
[6]徐 倩,文祥荣,孙守光.结构动态力源识别的精细逐步积分法[J].计算力学学报,2002,19(1):53-57. Xu Qian,Wen Xiangrong,Sun Shouguang.High precision direct integration scheme for structural dynamic load identification[J].Chinese Journal of ComputationalMechanics,2002,19(1):53-57.
[7]张运良,林 皋,王永学,李志军,李广伟.一种改进的动态力源时域识别方法[J].计算力学学报,2004,21(2):209-215. Zhang Yunliang,Lin Gao,Wang Yongxue,Li Zhijun,Li Guangwei.An improved method of dynamic load identification in time domain[J].Chinese Journal of ComputationalMechanics,2004,21(2):209-215.
[8]王淑娟.基于Lancaster结构的二阶系统解耦算法研究及其应用[D].哈尔滨:哈尔滨工程大学,2009:1-145. Wang Shujuan.Quadratic system decoupling algorithm researches based on lancaster structure and its applications[D]. Harbin:Harbin Engineering University,2009:1-145.
[9]王 静,陈海波,王 靖.基于精细积分的冲击力源时域识别方法研究[J].振动与冲击,2013,32(20):81-85. Wang Jing,Chen Haibo,Wang Jing.Impulsive load identification in time domain based on precise time-integrationmethod [J].Journal of Vibration and Shock,2013,32(20):81-85.
[10]钟万勰.结构动力方程的精细时程积分法[J].大连理工大学报,1994,32(2):131-136. ZhongWanxie.On precise time-integrationmethod for structural dynamics[J].Journal of DaLian University of Technology,1994,32(2):131-136.
[11]林家浩,沈为平,威廉斯FW.受演变随机激励结构响应的精细逐步积分法[J].大连理工大学学报,1995,35(5): 600-605. Lin Jiahao,Shen Weiping.High precision direct integration scheme for analysing structural nonstationary random responses[J].Journal of DaLian University of Technology,1995,35(5):600-605.
[12]钟万勰,杨再石.连续时间LQ控制主要本征对的算法[J].应用数学和力学,1991,12(1):45-50. Zhong Wanxie,Yang Zaishi.On the computation of themain eigen-pairs of the continuous-time linear quadratic control problem[J].Applied Mathematics and Mechanics,1991,12(1):45-50.
A load identification method based on decoup ling of Lancaster structure
WANG Shu-juan,WANG Guo-qiao,SHEN Ji-hong,HANWei-min
(School of Science,Harbin Engineering University,Harbin 150001,China)
The way of the load identification in time domain which is based on themodal analysis that the system equation is transformed into a non-coupling form bymodalmatrix,is only applicable for the proportional damping or classical damping system.In this paper,based on structure-preserving decoupling method of second-order system,a new mathematicalmodel of load identification was established.The system-decouplingmodel was established based on the Lancaster structure and the decoupling transformation was obtained;then,themodel of uncoupled response system based on the decoupling transformation was established,and on the assumption of linear load identification in tiny-time,the formula of load identification was deduced;finally,themodelwas calculated based on high precision direct integration scheme, and the history of force identification was obtained by structural dynamic response.The experiments verify that the proposed method could improve the accuracy of recognition,and is effective for the non-proportional damping system.And it is the focus of the paper.
Lancaster structure;decoupling;high precision direct integration scheme;linear assumption
TB535
:Adoi:10.3969/j.issn.1007-7294.2017.01.007
2016-09-09
国家自然科学基金资助项目(11226324);黑龙江省基金资助项目(A201407)
王淑娟(1982-),女,硕士生导师,E-mail:wangshujuan@hrbeu.edu.cn;
王国巧(1990-),女,硕士研究生,E-mail:Wgq19900424@163.com;
沈继红(1966-),男,教授,博士生导师;
韩伟民(1990-);男,硕士研究生。
1007-7294(2017)01-0052-09
猜你喜欢
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
应用数学(2020年2期)2020-06-24
数学物理学报(2020年1期)2020-04-21
北方工业大学学报(2019年5期)2019-03-30
测控技术(2018年11期)2018-12-07
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
中国港湾建设(2017年11期)2017-12-19
