
基于功能节点的有人/无人机协同攻击模式研究∗
2017-05-24 05:40李冬予中国电子科技集团公司第二十研究所西安70068中国运载火箭技术研究院北京00076
舰船电子工程 2017年5期
纪 敏 李冬予(.中国电子科技集团公司第二十研究所西安70068)(.中国运载火箭技术研究院北京00076)
基于功能节点的有人/无人机协同攻击模式研究∗
纪 敏1李冬予2
(1.中国电子科技集团公司第二十研究所西安710068)(2.中国运载火箭技术研究院北京100076)
引入节点分析法,对有人/无人机协同作战的系统功能组成和攻击模式进行行研究。提出有人/无人机协同作战的应用构想,并从信息传递的角度对作战流程进行分析,分解为六个任务序列。将系统划分为六个功能节点,并给出了各节点的基本组成、功能活动和信息传递。将各参战单元的功能节点进行排列组网,得到几种攻击模式。选取一种典型的攻击模式,对其作战过程、信息交互和攻击区进行研究。
有人/无人机;协同作战;攻击模式;功能节点;信息流
ClassNumber V271
1 引言
有人机和无人机的编队协同作战,将低成本的无人机作为前线感知和攻击平台,成为一种未来作战模式或空战战术[1]。2016年3月30日美国国防部举行了“忠诚僚机”概念研讨会[2],在未来发展计划中,明确指出僚机和五代机将构成有人机和无人机编、队执行作战任务,由五代机飞行员下达自主飞行指令,实施目标攻击。2016年8月27日,美海军首次验证了与联合作战、跨域协同对应,在发展未来空战手段上,摒弃了“下一代”单一平台的传统理念,下一代远程打击系统不是某种单一型号的战斗机,而是一个有人/无人组合、战略/战术打击兼顾、现役/新研结合、覆盖侦查、指挥控制、打击、评估等环节的复杂“系统家族”。
目前,国内对有人/无人平台协同作战的研究多在决策与控制的算法研究,对顶层设计、技术突破和系统应用方面[3],与西方发达国家相比差距仍然巨大。对有人/无人机编队和协同作战的研究需要攻克一系列技术难关[4],首先必须明确系统中的人机功能分配问题:如何既能最大限度地发挥无人机的自主作战力,又不影响编队中有人机指挥员的作用,达到最佳的系统平衡。因此,如何确定有人机和无人机协同作战系统的体系结构、功能划分和作战应用,是亟需深入研究的问题。
2 有人/无人机协同作战应用构想
本文提出在有人/无人机编队在非对称作战情况下的应用构想[5~7],我方雷达系统没有首先发现敌战斗机的情况下,在敌方首先发现我方发起进攻后,对敌方导弹进行拦截。以各作战单元信息传递为分析对象,有人/无人机协同空对空的作战应用进行构想:
1)预警机发现敌方机群,指挥引导我方机群完成编队飞行,到达集合区。
(1)预警机发现目标机群,向地面指挥控制中心发送预警信息。指控中心根据预警信息分别向有人机基地和无人机基地下达起飞命令。
(2)指控中心按多机协同航路规划规划飞行航路,引导我方机群到达集合区。
(3)我方机群在集合区自动组网,有人机(长机)进行作战编队控制。
(4)有人机作为空中指挥控制中心,综合目标指示信息、载机信息和武器信息,制定作战计划(如火力分配方案、攻击模式、制导方式),向各作战单元下达作战指令。
2)敌方首先发现我方机群并进行攻击。
(1)敌方机群的探测雷达性能优于我方机群的探测雷达,敌方首先发现我方无人机编队,锁定我方无人机为攻击目标。
(2)当我方无人机进入敌方攻击区,敌机发射导弹进行攻击。
3)我方机群发现敌方导弹并发射导弹拦截导弹。
(1)我方机群发现敌方导弹,敌方导弹被我方作战单元2的探测雷达截获。
(2)我方有人机指挥引导作战单元3发射导弹拦截敌方导弹。
4)我方机群发现、锁定敌方机群,并指挥引导无人机攻击目标机群。
(1)根据作战指令,作战单元2的制导雷达对目标进行精确跟踪,并传递目标信息给作战单元3。
(2)进行火控解算、瞄准引导。目标机进入作战单元3的攻击区,发射导弹。
(3)导弹发射后,作战单元4对导弹进行他机制导直到导弹命中目标,在制导过程中制导雷达对目标进行持续跟踪,一方面适时向导弹发送飞行控制指令,另一方面向有人机传送导弹飞行数据和目标跟踪数据。
(4)有人机综合目标跟踪数据、导弹飞行数据、作战单元状态参数等,必要时调整作战方案。
5)导弹命中目标后,有人机根据战场各来源数据进行杀伤效果评估,制定新的作战计划,下达作战指令。
本文将预警机作为有人/无人机协同作战系统的一个输入,分析有人/无人机协同作战系统从到达集合区自动组网并完成编队控制后到第一次发射导弹命中目标的作战过程,将有人/无人机协同空对空作战系统完成一次作战任务分解为六个任务序列:1)对目标的探测跟踪;2)对作战单元的指挥控制;3)火控解算、瞄准引导;4)对武器的发射控制;5)对发射后武器的控制导引;6)对完成一次作战任务的效果评估。
3 有人/无人机协同作战系统功能节点研究
3.1 有人/无人机协同作战系统功能节点划分
对有人/无人机协同作战系统进行功能节点分析,实质上是将物理特性不同但功能一致的相关设备在逻辑上集合成为的一个功能节点,因此每一个功能节点都是一个节点集。依据有人/无人机协同完成一次作战任务所必需完成的任务序列,本文将有人/无人机协同作战系统按功能划分为有六类功能节点[8]:目标探测节点(Target Detection Node,TDN),指挥控制节点(Command and Control Node,CCN),火控解算节点(Fire-Control Compute Node,FCCN),武器发射节点(Weapon Launch Node,WLN),武器制导节点(Weapon Guidance Node,,WGN),武器节点(Weapon Node,WN)。各功能节点的信息输入输出、功能活动和功能设备装备,如表1所示。
3.2 有人/无人机协同作战攻击模式与节点组网
系统功能节点的组网方式与系统的攻击模式相对应,在不同的攻击模式下,对于承担不同节点功能的战斗机平台需装备对应功能设备以完成其作战职能[9]。对有人/无人协同作战武器系统节点进行排列组合并组网,可以得到不同的攻击模式方案。
本文与有人机F1编队作战的三架无人机(F2,F3,F4)为异构型[10],其中F2为察打一体型、F3为攻击型、F4为侦察型,其可承担的功能节点如表2。
表3列出了有人/无人协同作战的几种协同攻击模式与功能节点组网方式。

表1 系统功能节点

表2 作战平台可承担功能节点
按照信息的性质和作用[11],将有人/无人机协同作战系统的信息分为三类:态势流,状态流,指控流。根据有人/无人协同空对空作战的基本流程,对有人/无人协同作战系统中信息流进行分析:
1)态势流
Ttattr为目标属性信息;Ttstate为目标运动参数;Tflpos为战斗机飞行的航迹信息;Tfstate为战斗机运动参数;Twbefore为武器在发射前的状态参数信息;Tfcc为实时火控解算结果,包括实时导弹攻击区解算结果,导弹弹道解算结果等;Twlaunch为武器发射装订数据;Twpos为武器飞行的航迹信息;Twstate为武器在发射后的运动参数;

表3 协同攻击模式与节点组网方式
2)状态流
STDN为目标探测节点的状态信息,用于描述目标探测节点中各子节点当前的运行状态和探测目标能力评价值;SFCCN为火控解算节点的状态信息,用于描述火控解算节点中各子节点当前的运行状态和火控解算能力评价值;SWLN为武器发射节点的状态信息,用于描述武器发射节点中各子节点当前的运行状态和武器攻击能力评价值;SWGN为武器制导节点的状态信息,用于描述武器制导节点中各子节点当前的运行状态和制导能力评价值;SCCN为指挥控制节点的状态信息,描述当前负责指挥控制的节点的运行状态,当节点运行状态为“故障”时,及时切换指挥控制节点。
3)指控流
Ctd为目标探测指挥控制指令,包括目标搜索提示信息、探测控制信息、跟踪控制信息等;Cfcc为火控解算指挥控制指令;Cwm为武器管理控制指令;Cwl为武器发射前输入武器的武器发射控制指令;Cwg为武器制导控制指令;Cguide为武器发射后输入武器的武器制导指令。
4 有人/无人机协同作战典型攻击模式研究
4.1 典型攻击模式下的节点信息交互
有人机和无人机采用不同协同攻击模式,其系统中信息流的内容、强度、流向也会发生变化[12]。选取表3中有人/无人机的协同攻击模式Mode2,分析系统在攻击过程中的信息流过程[13]。系统信息流图如图1所示,攻击过程与信息流的描述如表3所示。
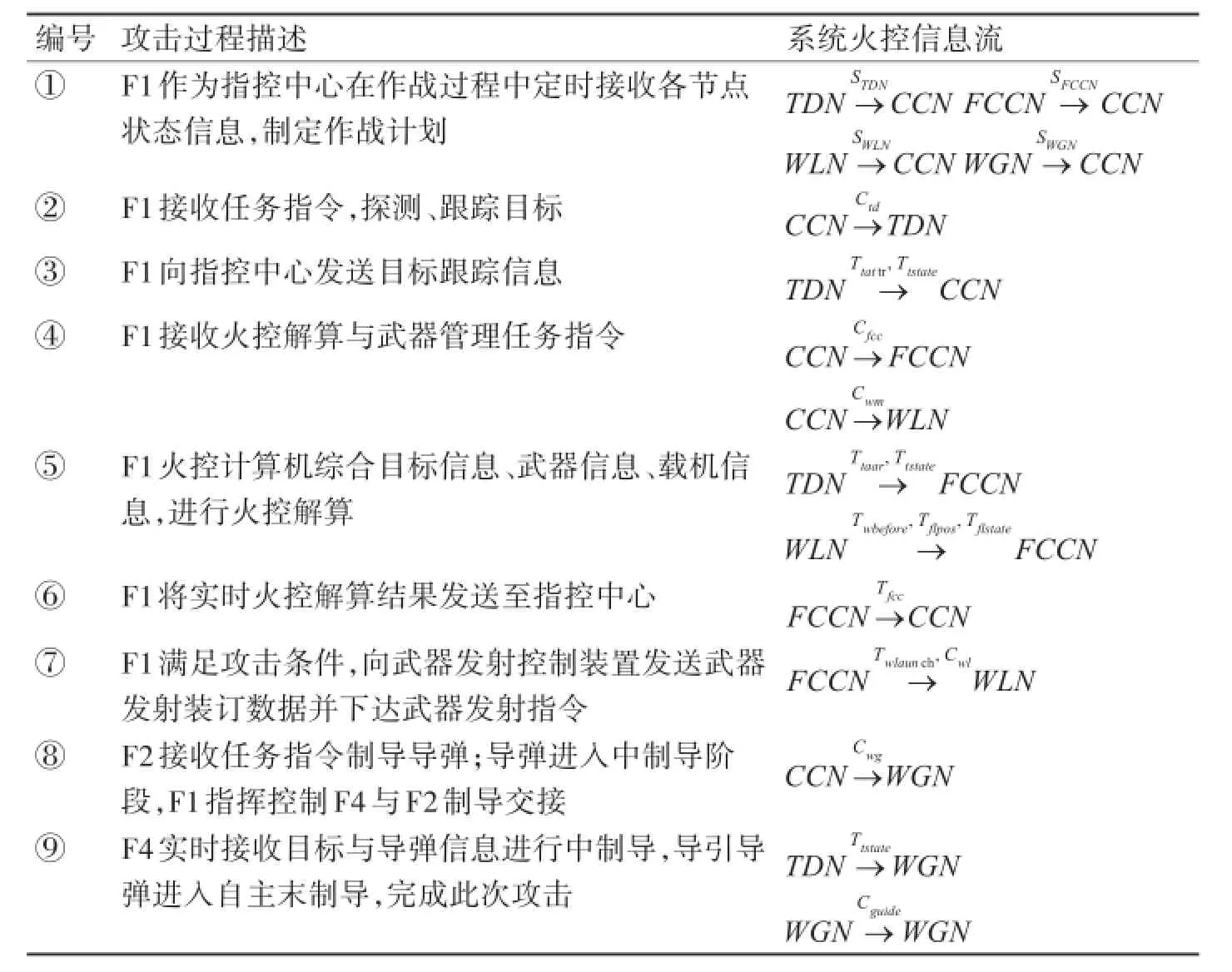
表4 Mode2攻击过程与火控信息流描述
4.2 典型协同攻击模式下的攻击仿真
对典型协同攻击模式Mode2下导弹可攻击进行仿真[14],设定仿真试验参数为:我方编队中有一架有人机和三架无人机,与目标同在10km高度飞行,飞机的航向均为0°的编队队形如图2所示。
有人机F1机载雷达有效探测距离为120km,有效探测角度为120°,飞行速度为380m/s,携带某型导弹,其导引头截获距离为18km;无人机F2机载雷达有效探测距离为80km,有效探测角度为80°,飞行速度为350m/s,携带某型导弹,其导引头截获距离为18km;无人机F3飞行速度为350m/s,携带某型导弹,其导引头截获距离为18km。无人机F4机载雷达有效探测距离为80km,有效探测角度为80°,飞行速度为350m/s。
经过仿真计算得到导弹攻击区远、近边界随目标进入角变化曲线,如图3所示。导弹的可攻区面积计算结果为3214km2,仿真时间24.449s。
5 结语
本文引入功能节点,对有人/无人机协同作战的攻击模式进行了研究。提出了一种有人/无人机的协同作战构想,并从信息传递的角度分析了作战的基本流程,将作战任务分解为六个任务序列。将系统划分为了六个功能子节点,分析了各节点的相关设备、信息输入、信息输出和功能活动。将作战平台的功能节点排列组合并组网,得到几种有人/无人机协同作战的攻击模式。选取了一种典型的攻击模式,对其作战过程和信息交互进行了探讨,并进行了攻击区仿真。文章的研究内容对有人/无人机协同作战系统的体系结构、功能划分和作战应用有一定的指导意义。
[1]MARTELLINIM,ABAIMOV S,GAYCKEN S,et al.Fu⁃ture Attack Patterns[M].Information Security of Highly CriticalW ireless Networks.Springer International Publish⁃ing,2017:59-62.
[2]郑大壮.“忠诚僚机”概念将大幅提升有人/无人机协同作战能力[J].防务视点,2016,06:63.
[3]郑大壮.美空军有人机/无人机协同作战的未来走向[J].防务视点,2015,08:59.
[4]刘纪文,袁胜智,漆云海,等.有人机/无人机协同作战系统关键技术研究[J].舰船电子工程,2012,06:1-3,36.
[5]王焱.有人/无人机协同作战[J].电讯技术,2013,09:1253-1258.
[6]MARTELLINIM,ABAIMOV S,GAYCKEN S,et al.Fu⁃ture Attack Patterns[M].Information Security of Highly CriticalW ireless Networks.Springer International Publish⁃ing,2017:59-62.
[7]HOROW ITZBM,LUCEROD S.System-aware Cyber Se⁃curity:A Systems Engineering Approach for Enhancing CyberSecurity[J].INSIGHT,2016,19(2):39-42.
[8]王震雷,张国,罗雪山.混编防空导弹网络化作战系统功能体系结构分析[J].现代防御技术,2007,02:1-6.
[9]CHEN X,ZHAO F,HU X.The Air Combat Task A lloca⁃tion of Cooperative Attack for Multiple Unmanned Aerial Vehicles[J].International Journal of Control and Automa⁃tion,2016,9(9):307-318.
[10]HU B,ZAINIA H B,XIE L,etal.Distributed guidance for interception by usingmultiple rotary-wing unmanned aerial vehicles[C]//Advanced Intelligent Mechatronics(AIM),2016 IEEE International Conference on.IEEE,2016:1034-1039.
[11]卜广志.武器装备体系中的信息流分析与评估研究[J].系统工程与电子技术,2007,08:1309-1313,1321.
[12]ZHONG Y,YAO PY,SUN Y,etal.Research on Com⁃mand and ControlofMAV/UAV Engagement from the Co⁃operative Perspective[C]//Information System and Artifi⁃cial Intelligence(ISAI),2016 International Conference on.IEEE,2016:38-44.
[13]CRESPO A B,IDROVOG G,RODRIGUESN,etal.A virtual reality UAV simulation with body area networks to promote the elders life quality[C]//Technology and In⁃novation in Sports,Health and Wellbeing(TISHW),In⁃ternational Conference on.IEEE,2016:1-7.
[14]张平,方洋旺,乔治军,等.超视距空空导弹协同允许发射区解算方法[J].电光与控制,2012,03:12-16+20.
Cooperative A ttack Pattern of M anned/Unm anned Vehicle Based on FunctionalNodes
JIM in1LIDongyu2
(1.The20thResearch InstituteofCETC,XiƳan 710068)(2.China Academy of Launch Vehicle Technology,Beijing 100076)
This paper studies on the functional composition and attack models ofmanned/unmanned vehicle cooperative com⁃bat system by nodal analysis.After putting forward the application conception of cooperative air combat,the operational process from the view of information is analyzed and decomposed into six task sequences.The system is divided into six functional nodes,and the properties of each node are given including basic composition,functionalactivitiesand information flow.The function nodes ofunitare arranged to obtain differentattackmodes.A typicalattackmode is selected to study the operationalprocess,information exchange and attack area simulation.
manned/unmanned vehicle,cooperative air combat,attack pattern,functionalnodes,information flow
V271 DO I:10.3969/j.issn.1672-9730.2017.05.003
2016年11月10日,
2016年12月21日
纪敏,女,硕士,助理工程师,研究方向:新型作战系统和武器系统建模仿真。李冬予,男,硕士,助理工程师,研究方向:航空电子综合系统。
猜你喜欢
小哥白尼(军事科学)(2021年1期)2021-07-16
科学与财富(2021年36期)2021-05-10
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
山东工业技术(2018年12期)2018-08-20
科技资讯(2017年18期)2017-07-19
小哥白尼·军事科学画报(2017年3期)2017-06-12
今传媒(2016年11期)2016-12-19
少儿科学周刊·儿童版(2016年2期)2016-03-19
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
