
两足并联腿机构工作空间分析
2017-06-24 13:25戚开诚张建军刘宇红商鹏
河北工业大学学报 2017年2期
戚开诚,张建军,刘宇红,商鹏
(河北工业大学机械工程学院,天津300130)
两足并联腿机构工作空间分析
戚开诚,张建军,刘宇红,商鹏
(河北工业大学机械工程学院,天津300130)
采用并联机构3-UrPS作为两足步行器的腿部机构,3-UrPS中3个Ur采用等腰对称布置,建立了两足步行器的三维CAD模型及其虚拟样机,分析了3-UrPS并联机器人的反解,并根据反解研究该机构的定姿态工作空间.基于三维空间搜索的方法在MATLAB中得到了工作空间的三维形状,展示了工作空间的大小.结果表明该机构可用于作为步行器的腿部机构,为控制研究奠定基础.
3-UrPS;定姿态;工作空间;并联机构;三维搜索法
0 引言
并联机构具有承载力高、高刚度等优点,少支链6自由度并联机构由于支链之间的干涉少,结构紧凑,而得到广泛研究.许多学者采用了不同的机构用于承载用的步行器.Daniele Cafolla[1]研制仿人机器人,腿部机构是三自由度并联机构;王洪波[2-9]等分析3自由度3-UPU并联机构,以及其两两合并后的6-SPU并联机构,讨论它们在四足/两足可重组并联腿步行机器人中的应用;王云等[7]研究了基于3-RPS机构的四足步行器特性;金振林[8-9]等基于3-UPS机构研究了双足以及六足步行器的运动特性;范顺成[10]等基于Stewart机构分析了两足并联腿的运动仿真特性;荣誉等[11]提出了1种基于(U+UPS)P+UPS机构的三自由度并联机械腿,建立了机械腿机构的误差模型;Tao L[12]等提出了1种7自由度平面机构步行腿,实现了直线行走;Rodriguez-Cianca[13]基于柔性机构提出了一种柔性关节应用于步行器的脚趾关节.
以上学者采用的机构其主动副是P副[7-10],加在了支链的中间副上,存在问题是惯性大;平面机构受其结构限制,只能直线行走[12].采用三支联六自由度并联机构,并且采用两自由度球面复合铰链Ur,解决了自由度单一以及驱动输入的问题.
本文采用3-UrPS并联机构作为两足步行器腿部结构,建立了其虚拟样机,分析了其机构反解,基于三维搜索法研究了其工作空间,得到了其定姿态的工作空间的三维形状.
1 两足并联腿CAD模型
采用3-UrPS作为腿机构,该机构由3条支链组成,Ur副结构示意图如图1所示,并联腿机构3-UrPS中Ur采用等腰对称布置,如图2是固定平台3个Ur副的布置简图;动平台的球铰布置如图3所示.

图1 Ur副结构示意图Fig.1 Coordinate system of Ur

图2 3-UrPS固定平台Ur副的布置简图Fig.2 Scheme of layout of Ur

图3 动平台球角布置示意图Fig.3 Scheme of layout of S
中间通过移动副相连,构成3-UrPS机构,该机构的动平台作为步行器的脚,2个3-UrPS机构的固定平台通过连接件固连作为步行器腰部.如图4所示为两足步行器虚拟样机模型,导入ADAMS中,加入约束以及与地面的接触,建立虚拟样机模型.
2 并联腿机构的位置反解
3-UrPS并联机器人通过3条相同的UrPS支链链接动、静平台(见图5).每条支链通过Ur副与静平台相连,3个Ur副的回转中心U1U2U3构成等腰三角形(见图2),每条支链通过S副与动平台相连,3个S副的转动中心S1S2S3也构成1个等腰三角形(见图3).需要指出的是固定平台和动平台上的2个三角形并不相似,采用此种布置方式使机构更具有一般性.将世界坐标系O-XYZ建在静平台上,坐标系原点O坐落在等腰三角形U1U2U3的中心,OX轴沿OU1方向,OZ轴垂直于静平台所在平面并指向上方.OY轴由右手螺旋定则确定.动坐标系o-xyz固连于动平台上,坐标系原点o位于等腰三角形S1S2S3的中心,ox轴指向oS1方向,oz轴垂直于动平台所在平面并指向上方.oy轴由右手螺旋定则确定.机构处于初始位姿时,坐标系oxyz与坐标系O-XYZ的方向相同,如图5所示.
动平台上的3个球副到动坐标系原点的距离分别为:l1,l2,l3,其中.静平台上的3个Ur副的转动中心到静坐标系原点的距离分别为:L1,L2,L3,其中L2=L3.OU2与oS2分别与OY轴、oY轴的夹角为φ和θ,且φ≠θ.如图1和图2所示η为Ur副的OuE和U2U3的夹角,3个Ur副姿态相同.为此,可以获得上述6个运动副在动、静坐标系下的坐标分别为

动作标系o-xyz的原点在静坐标系下的坐标为

动作标系相对于静坐标系的基于ZYX欧拉角的旋转矩阵为

每条支链间S副和Ur副间的距离由P副的长度确定,故关系为



图4 步行器虚拟样机模型Fig.4 Model of the biped robot

图5 3-UrPS并联机构的坐标系Fig.5 Coordinate system of 3-UrPS
当动平台的位置和姿态参数均已知时,可以根据式(5)计算出P副的长度.另外,根据S副和Ur副坐标的关系,可以计算出P副所在方向的向量,该向量也就是Ur副动平台的法线方向.当计算Ur副中的主动副的输入角度时,P副所在向量将被用到,其可通过式(6)计算

Ur并联机构是纯转动机构,只有姿态的变化,没有位置的变化.根据Ur机构的特点,如图1所示,当电机E转过一个角度θ1时,s1的向量为

如图1所示,当电机A转过1个角度θ2时,s2的向量为:

由Ur机构的几何结构特点,s3既垂直于s1也垂直于s2,所以的单位矢量,其中整理得

所以,用Ur副动坐标系的3个单位主矢量相对于Ur副定坐标系的方向余弦组成的3×3矩阵为整理得



根据式(5)计算出移动副的长度,可以知道动平台上S副在固连于副动平台上的坐标系下的坐标为

那么,关系式(15)成立



可见,式(5)、式(17)是描述了3-UrPS的位置反解.
2 3-UrPS并联腿的定姿态工作空间
假设该机构的几何参数:初始位姿时,动作标系相对于静坐标系的旋转矩阵为单位阵、动坐标系原点在静坐标系中的坐标为:其他参数为:
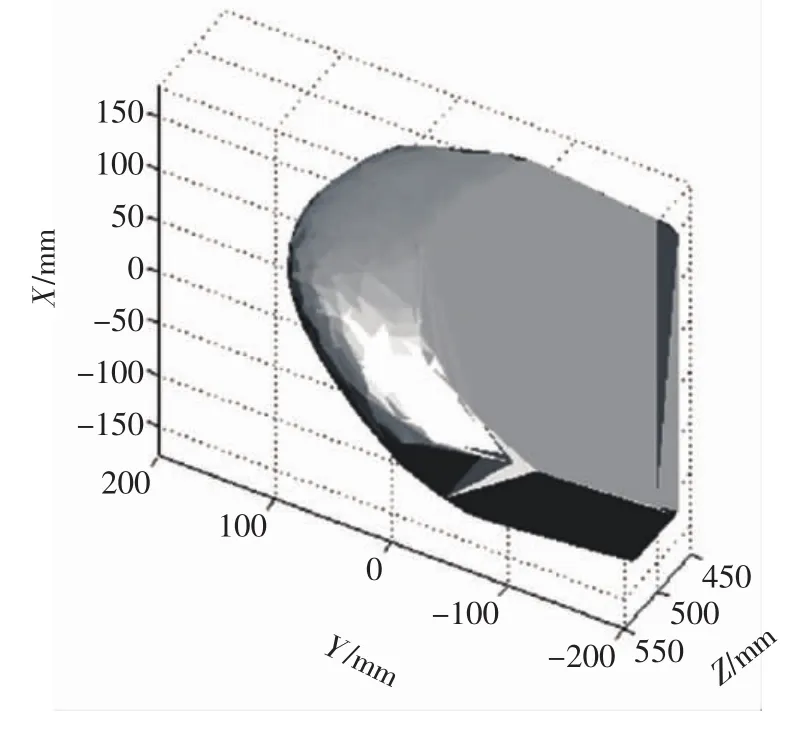
图6 三维空间中的3-UrPS并联机构工作空间Fig.6 3D shape of workspace of 3-UrPS

图7 x=-100时yz平面的工作空间形状Fig.7 The shape in the plane yz and x=-100

图8 x=-50时yz平面的工作空间形状Fig.8 The shape in the plane yz and x=-50

图9 x=0时yz平面的工作空间形状Fig.9 The shape in the plane yz and x=0

图10 x=50时yz平面的工作空间形状Fig.10 The shape in the plane yz and x=50

图11 x=100时yz平面的工作空间形状Fig.11 The shape in the plane yz and x=100

图12 x=150时yz平面的工作空间形状Fig.12 The shape in the plane yz and x=150
从得到图7至图12的工作空间看,3-UrPS机构尺寸并不大,工作空间为对称图形,而且该机构的反解求解过程简单.仅从工作空间和控制的角度考虑,可以采用该机构作为人形机器人的腿部机构.需要指出的是,在确定3-UrPS机构工作空间时,并未考虑球铰的转角范围.
3 结论
1)3个并联Ur机构进行等腰布置,建立了基于3-UrPS并联腿的虚拟样机模型;
2)分析了3-UrPS机构的位置反解;
3)基于位置反解研究了给定姿态的工作空间,采用三维搜索法在MATLAB展示了三维工作空间的大小,给出了给定截面上二维形状和大小.工作空间为对称图形,而且该机构的反解求解过程简单.仅从工作空间和控制的角度考虑,可以采用该机构作为人形机器人的腿部机构,为下一步的结构设计及控制研究打下理论基础.
[1]Cafolla D,Wang M,Carbone G,et al.LARMbot:a new humanoid robot with parallel mechanisms[C]//ROMANSY 21-Robot Design,Dynamics and Control,2016.
[2]王洪波,齐政彦,胡正伟,等.并联腿机构在四足/两足可重组步行机器人中的应用[J].机械工程学报,2009,45(8):24-30.
[3]温月华.四足/两足并联腿步行机器人精度分析与优化设计[D].秦皇岛:燕山大学,2015.
[4]王洪波,徐桂玲,胡星,等.四足并联腿步行机器人动力学[J].机械工程学报,2012,48(23):76-82.
[5]桑凌峰,王洪波,孙利.载人步行椅机器人的自由度和腿机构上平台的布置方式分析[J].燕山大学学报,2013(4):317-325.
[6]徐桂玲.助老助残四足并联腿步行机器人机构设计与分析[D].秦皇岛:燕山大学,2010.
[7]王云.基于3-RPS四足并联腿步行机器人的研究[D].秦皇岛:燕山大学,2014.
[8]武磊.基于三自由度并联腿的仿生六足机器人的设计[D].秦皇岛:燕山大学,2012.
[9]荣誉,金振林,崔冰艳.六足农业机器人并联腿构型分析与结构参数设计[J].农业工程学报,2012,28(15):9-14.
[10]范顺成,韩书葵,谷慧茹.两足步行机器人并联腿机构的稳定性分析[J].河北工业大学学报,2004,33(1):27-31.
[11]荣誉,刘双勇,韩勇,等.六足制孔机器人三自由度并联机械腿的误差模型及验证[J].农业工程学报,2016,32(15):18-25.
[12]Tao L,Ceccarelli M.Design and simulated characteristics of a new biped mechanism[J].Robotica,2014,33(7):1-21.
[13]Rodriguez Cianca D,Weckx M,Torricelli D,et al.A compliant 2-DoF ankle-foot system for a biologically inspired humanoid robot[C]//Ieee-Ras,International Conference on Humanoid Robots.IEEE,2015:264-269.
[责任编辑田丰 夏红梅]
Workspace analysis of a biped mechanism
QI Kaicheng,ZHANG Jianjun,LIU Yuhong,SHANG Peng
(School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China)
A parallel mechanism 3-UrPS is used to be the leg mechanism of a biped robot.The parallel mechanism Uris assigned with isosceles triangle in the modeling of 3-UrPS.The model of the biped robot is built in the research.The inverse kinematis of the parallel mechanism is analysed based on the invese positon solution,and the work space of fixed pose is researched.Then,the 3D shape is obtained in the Matlab used the three-dimensional optimization algorithm.The dimension and the shape are shown in the figures.The research in this paper is the basis of the control system of the biped robot.
3-UrPS;fixed pose;workspace;parallel mechanism;three-dimensional optimization algorithm
TH 112;TP 13
A
1007-2373(2017)02-0052-06
10.14081/j.cnki.hgdxb.2017.02.010
2017-01-06
河北省科技计划(15211829);国家自然科学基金(15211829);天津市科技支撑计划(14JCTPJC00532)
戚开诚(1975-),男,讲师,博士,qkc@hebut.edu.cn.通讯作者:张建军(1971-),男,教授,博士,zhjjun96@139.com.
猜你喜欢
数学大王·中高年级(2022年5期)2022-05-22
中学生数理化·中考版(2021年10期)2021-11-22
今日农业(2021年4期)2021-06-09
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
北京航空航天大学学报(2014年1期)2014-12-19
中国机械工程(2012年15期)2012-07-25
中国机械工程(2010年9期)2010-06-04
