
机器人探测气体泄漏源定位研究
2017-07-26 01:28李素霞
实验技术与管理 2017年7期
李素霞
(潍坊科技学院经 济管理学院,山东 寿光 262700)
机器人探测气体泄漏源定位研究
李素霞
(潍坊科技学院经 济管理学院,山东 寿光 262700)
采用摄像机小孔成像模型以及气味主动嗅觉的组分方程模型,建立了机器人检测气味泄漏源的控制模型,给出了气味源探测的算法。通过模拟天然气泄漏的过程表明,采用的模型能够较好实现气体浓度变化检测。软件仿真结果表明机器人拥有了环境运动的能力;实际环境的应用结果表明系统可以将团状的气体分子在空气中运动感知和发现,设计的控制机器人气味追踪算法具有实际应用可行性。研究成果对于我国机器嗅觉和气体定位的发展有一定的理论和实际意义。
机器人; 主动嗅觉; 组分方程
智能视频监控系统中,运动目标的追踪与检测一直都是其研究难点和关键,这也是包括自动控制、机器视觉等学科的研究热点方向[1-3]。其中机器嗅觉定位于控制更为重要的关键技术,日本的团队在上世纪90年代就开始了机器嗅觉问题的探究,当时最早出现的成果是从飞蛾行为的模型中建立,通过多个气体、风速传感器实现气味的方向性检查,结合风向和气味信息共同实现气味检测,以上研究已经在消防领域有了广泛性的应用[4-7];澳大利亚Russel课题组,采用的是基于涡虫趋化性运动模型设计的地下味源定位系统,提出了涡虫跟踪算法较好的实现了酒精源定位[8-9];瑞士的Pyk课题组则是考虑了雌蛾基于信息素实现雄蛾跟踪模型,实现了机器人探测化学源的应用,之后该团队更是结合人工蛾模型设计了能够躲避搜索路径障碍物的气味嗅觉机器人[10-13];国内关于机器人嗅觉以哈工大、中科院遥感所为代表,已经实现了移动机器人仿生运动控制研究,能够较好实现火灾烟雾的定位[14-16]。
近年来随着国内雾霾现象的日益恶化,各类关于气味的研究又成为了各领域的研究热点[17-18]。气味或者气体分子分布比较容易受到湍流的扰乱,会出现随机弯曲的现象,导致结构的不定性[19-21]。上述问题必然导致传感器检测气体浓度容易被扰动。基于以上问题和背景,本团队提出了仿生学的主动嗅觉定位,建立了实现机器人检测气味泄漏源的模型,较好地完成了气体泄漏源定位。研究成果对于我国机器嗅觉和气体定位的发展有一定的理论和实际意义。
1 气体泄漏源定位模型
1.1 运动目标的移动机器人控制
首先分析移动机器人的控制模型。设移动机器人定位中心是(xo,yo),于是可以将目标的跟踪定位分为以下2部分:计算机器人左右移动的距离ΔX,以及得到机器人计算前后移动的距离△Z。对于机器人左右移动的实际距离采用摄像机小孔成像的模型进行得出,于是存在如下关系:
(1)
上述方程中参数都是小孔成像模型参数,详见文献6和文献14,其中的dx和dy表示摄像机成像像素的横向长度和纵向长度。
对于机器人计算前后移动的距离ΔZ,则较为复杂。因为实际的定位过程需要确保定位目标的成像和图像之间面积的比值不会发生变化,进而通过定位目标的成像和图像之间面积的函数关系得到机器人运动的ΔZ。这里设定位目标的成像和图像面积分别为k1和k2,设定位目标与机器人近似模型得到距离为mZ,于是依据运动模型可以得到以下函数关系:
(2)
上述方程中的YB(t)表述的是定位目标在图像直角坐标系中的位置。式(1)和式(2)可以按Kalman滤波确定定位目标的位置,进而计算得到相应的距离。
1.2 主动嗅觉的控制过程
本文设计的气味主动嗅觉的控制过程主要通过动量方程、组分方程的2类数学模型进行确定。
1.2.1 动量方程模型
气体分子的扩散会满足动量守恒,于是可以建立扩散过程中x、y、z方向上相应的动量方程。一般形式能够表述为
(3)
式中,ρ为气体分子密度,μt为t时间扩散系数,ui表示i分子的动量,gi表示i分子压力。
在x方向上的方程满足以下关系:
(4)
在y方向上的方程满足以下关系:
(5)
在z方向上的方程满足以下关系:
(6)
上述方程中参数u、v、w分别是x、y、z方向上扩散过程的速度,g是重力加速度,p是扩散开始的绝对压力。
1.2.2 组分方程模型
气体分子的扩散依然会满足组分质量守恒,于是可以建立扩散过程中组分方程,也是本文采用的模型:
(7)
上述方程中参数ω为各组分的质量分数,Dt是流体扩散系数。
1.3 气体定位算法
本文设计的气味定位过程算法如下:首先确定气体浓度阈值,气体浓度比此阈值小时就认为气体分子没有形成烟羽。移动机器人检测烟羽是依据风向传感器的逆向移动,低于设计的阈值就确定会没有烟羽;当高于阈值时,机器人就会采用扩展半径进行探测选择,直至找到气味源。
算法重复定位语句描述如下:
While (1) {If (Concentration>Limit Val) Follow Wind; Else Search Plume}
2 气体实验
2.1 环境模型
通过软件构建实验环境模型,环境设置成如下形式:泄漏口的初始速度设置为5 m/s,甲烷的质量分数设置为 1;空气入口的速度设置为0.5 m/s,出口压力直径设置为0.25 m。假设从泄漏口开始计算,迭代的时间步长设置为2.5 s,天然气的初始浓度设置为0,泄漏的初始速度设置为5 m/s。
2.2 算法和嗅觉应用结果
图1—3分别给出了系统模型算法应用52.5、105、157.5 s时室内甲烷的情况。从图中分布情况可以得出,系统能够较好地确定甲烷烟羽浓度变化情形,即采用的模型能够较好实现气体浓度变化检测。
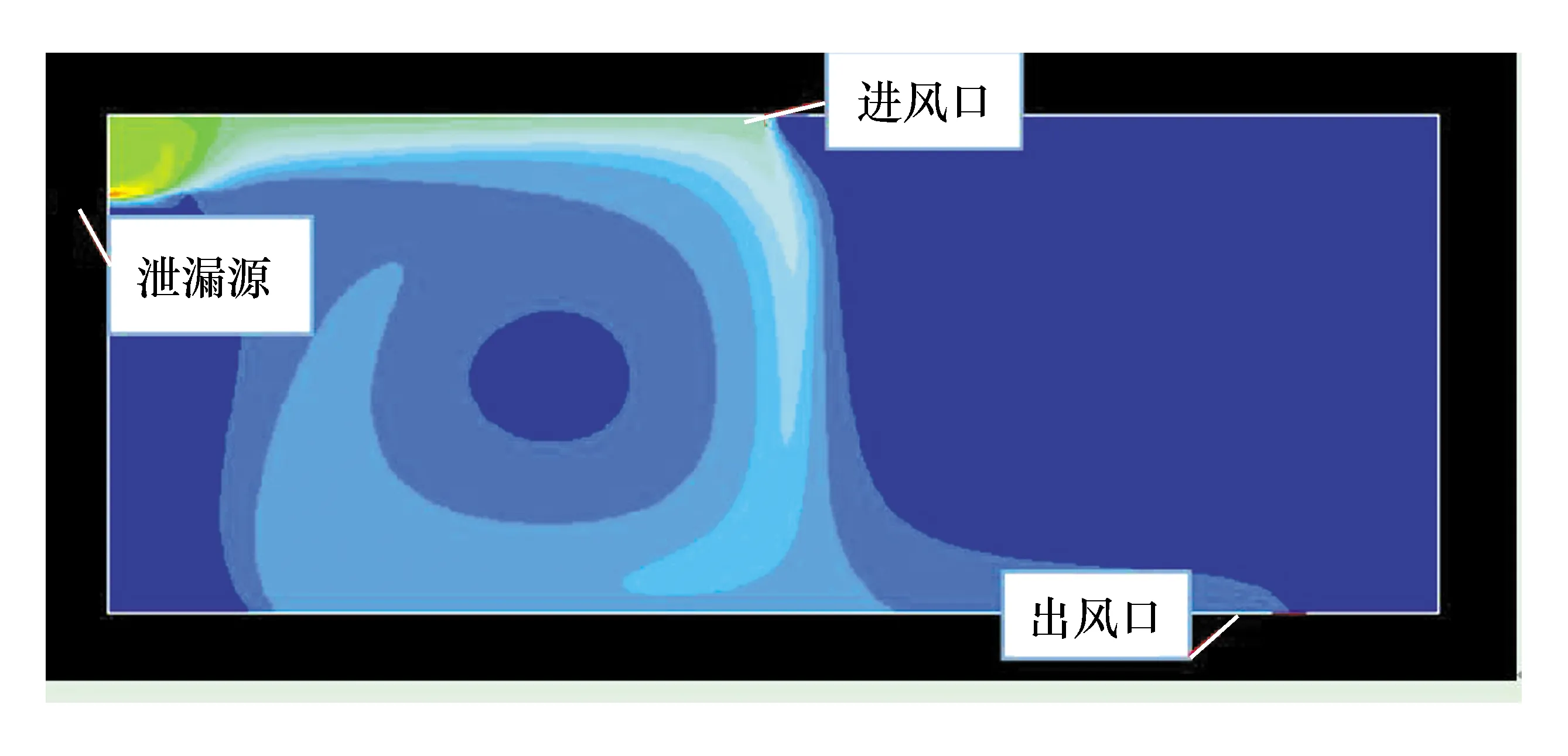
图1 应用52.5 s时室内甲烷的情况
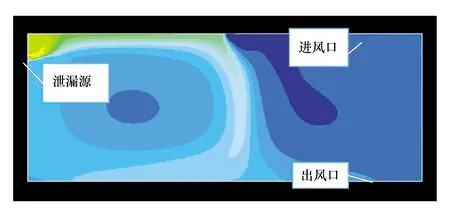
图2 应用105 s时室内甲烷的情况
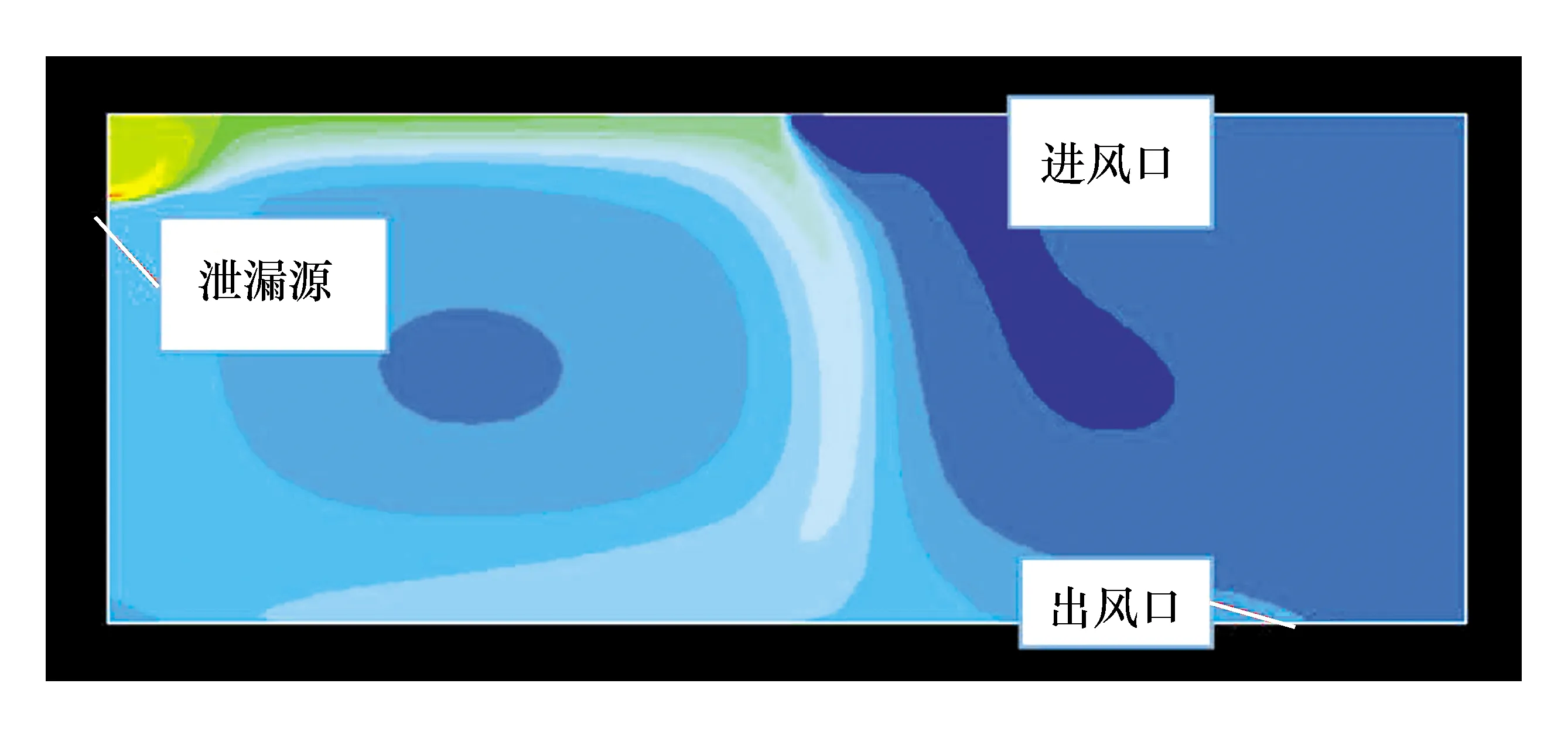
图3 应用157.5 s时室内甲烷的情况
图4给出了采用设计的机器人主动嗅觉气味源定位算法的软件仿真结果,模拟的实际环境尺寸与上述的模拟范围保持一致。从图4中的结果可以看出,机器人能够在不同的位置通过访问导入到源码文件搜索相应位置的甲烷烟羽浓度值来感知局部甲烷烟羽浓度大小。通过使用这种方法,模拟机器人有能力感知到局部的烟羽浓度,这样机器人便拥有了在模拟的环境中运动的能力。
2.3 实际应用分析
这里针对室内微风的环境进行实际应用,运用建立的动态呈湍流特性的模型,即在空间任一点的浓度和风速、风向是随时间变化的。图5为某实际环境的应用结果,由结果可知团状的气体分子在空气中运动被感知和发现,这表明设计的控制机器人气味追踪算法具有可行性。

图4 仿真结果(起点(5.1,0),起点浓度值C0=0.45)

图5 实际应用情况
3 结语
主动嗅觉定位技术可以主动对目标化学物质感知并确定其位置,在环境监测、危险物品泄漏检测、仓库安保等方面具有重要的意义。目前,这项技术仍然处在探索阶段,有着广阔的科研空间。本文主要完成了在计算机模型下,将基于浓度梯度搜索算法的烟羽跟踪策略进行了气源定位,并完成仿真验证和实际验证,证明了设计的可行性。
References)
[1] 贺宁,杨建华,陈立伟,等.主动嗅觉轮式移动机器人的系统设计及定位方法研究[J].机械科学与技术,2013,32(2):285-288.
[2] 赵智琦,房建东.隧道内车辆运输储罐泄漏源机器人仿生感知算法研究[J].机床与液压,2015,15(6):80-85.
[3] 陈一村,蔡浩,陈志龙,等.基于主动嗅觉的室内时变污染源定位方法[J].解放军理工大学学报(自然科学版),2016,17(3):257-263.
[4] 张东,程磊,刘波,等.基于移动机器人的主动嗅觉技术研究[J].计算技术与自动化,2014,33(2):7-10.
[5] 任坤,刘鹏.基于神经网络的移动机器人主动嗅觉定位研究[J].决策与信息(下旬刊),2015,20(8):247.
[6] 王阳,孟庆浩,李腾,等.室内通风环境下基于模拟退火算法的单机器人气味源定位[J].机器人,2013,35(3):283-291.
[7] 程磊,张东,刘波,等.基于无线传感器网络的气体泄漏源定位机器人设计[J].传感器与微系统,2015,91(2):85-87.
[8] 赵雨辰.唤醒嗅觉:从宗教仪式中气味的作用看艺术创作中嗅觉机制的运用[J].美与时代(上旬刊),2014,5(6):22-25.
[9] 陈一村,蔡浩,陈志龙,等.基于改进PSO算法的室内时变污染源定位方法[J].环境工程,2016,34(10):142-146,171.
[10] 崔日鲜,刘亚东,付金东,等.基于机器学习和可见光光谱的冬小麦叶片氮积累量估算[J].光谱学与光谱分析,2016,36(6):1837-1842.
[11] 程术希,孔汶汶,张初,等.高光谱与机器学习相结合的大白菜种子品种鉴别研究[J].光谱学与光谱分析,2014,21(9):2519-2522.
[12] 王肇国,易涵,张为华,等.基于机器学习特性的数据中心能耗优化方法[J].软件学报,2014,15(7):1432-1447.
[13] 徐健锋,汤涛,严军峰,等.基于多机器学习竞争策略的短时交通流预测[J].交通运输系统工程与信息,2016,16(4):185-190,198.
[14] 何清,李宁,罗文娟,等.大数据下的机器学习算法综述[J].模式识别与人工智能,2014(4):327-336.
[15] 陆悠,李伟,罗军舟,等.一种基于选择性协同学习的网络用户异常行为检测方法[J].计算机学报,2014,37(1):28-40.
[16] 武小红,蔡培强,武斌,等.基于无监督可能模糊学习矢量量化的近红外光谱生菜品种鉴别研究[J].光谱学与光谱分析,2016,36(3):711-715.
[17] 韩莹,李姗姗,陈福明,等.基于机器学习的地震异常数据挖掘模型[J].计算机仿真,2014,31(11):319-322.
[18] 唐飞,王波,查晓明,等.基于双阶段并行隐马尔科夫模型的电力系统暂态稳定评估[J].中国电机工程学报,2013,33(10):90-97.
[19] 徐健锋,许园,许元辰,等.基于语义理解和机器学习的混合的中文文本情感分类算法框架[J].计算机科学,2015,42(6):61-66.
[20] 鲁刚,余翔湛,张宏莉,等.基于集成聚类的流量分类架构[J].软件学报,2016,27(11):2870-2883.
[21] 孙丽华,严军峰,徐健锋,等.基于多机器学习竞争策略的短时雷电预报[J].计算机应用,2016,36(9):2555-2559.
Research on locating gas leakage source by robot detection
Li Suxia
(School of Economics and Management,Weifang University of Science and Technology,Shouguang 262700,China)
By using the camera small hole imaging model and the component equation model of odor active olfaction,a control model of locating odor leakage by robot detection is established,and the algorithm of odor source detection is presented. By simulating the process of gas leakage,the model can be used to detect the concentration change of gas,and the simulation results by using solfware show that the robot has ability for the environmental movement. The application in the actual environment shows that the system can perceive and find the movement of the mass of gas molecules in the air,and the algorithm of the designed control robot for odor tracking has the feasibility of practical application. The research results have theoretical and practical significance for the development of machine olfaction and gas location in our country.
robot; active olfaction; component equation
10.16791/j.cnki.sjg.2017.07.013
2017-01-13
国家自然科学基金项目(51562017);山东省自然科学基金项目(81083);山东省高等学校科技发展计划项目(J16LN51)
李素霞(1979—),女,山东寿光,硕士,讲师,主要从事计算机领域研究.
E-mail:liuna1934252@163.com
TP242.6
A
1002-4956(2017)07-0046-03
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
文苑(2020年7期)2020-08-12
故事作文·高年级(2019年6期)2019-06-20
小学科学(学生版)(2017年11期)2017-12-20
制造技术与机床(2017年3期)2017-06-23
Coco薇(2016年8期)2016-10-09
公民与法治(2016年8期)2016-05-17
红蜻蜓·低年级(2015年11期)2016-02-02
知识窗(2014年10期)2014-05-14
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
