
地-月L2点中继星月球近旁转移轨道设计
2017-09-27 05:29孙超唐玉华李翔宇乔栋
深空探测学报 2017年3期
孙超,唐玉华,李翔宇,乔栋
(1.北京理工大学 宇航学院,北京 100081;2.深空探测自主导航与控制工业与信息化部重点实验室,北京 100081)
地-月L2点中继星月球近旁转移轨道设计
孙超1,2,唐玉华1,李翔宇1,2,乔栋1,2
(1.北京理工大学 宇航学院,北京 100081;2.深空探测自主导航与控制工业与信息化部重点实验室,北京 100081)
位于地月L2点周期轨道的中继星将首次为“嫦娥4号”月球背面着陆探测任务提供通信中继服务。中继星转移轨道设计是中继任务实施的关键环节。针对中继星转移轨道存在转移时间、近月点高度和halo轨道振幅等约束条件,系统研究了基于月球近旁的地月L2点转移轨道设计方法。首先基于限制性三体模型,分析了halo轨道族与着陆点可见性关系;然后将月球近旁转移轨道分为地月直接转移段和地月动平衡点附近周期轨道拟流形入轨转移段,采用带有状态约束的微分修正算法对这两段轨道进行拼接,得到了从地球附近至目标轨道族的月球近旁转移轨道;最后,针对南族halo轨道分析了halo轨道振幅和月球飞越高度对转移轨道设计的影响,以及转移轨道的入轨相位分布。仿真结果表明:月球近旁转移轨道设计方案具备工程上的可行性与优越性。该方案可以为实际工程任务和应用提供参考。
地月L2点;中继星;月球近旁;转移轨道
0 引 言
“嫦娥4号”计划于2018年发射,将实现人类首次月球背面的软着陆探测。由于月球公转和自转具有相似的周期性,着陆器在月球背面无法与地球直接通信,因此“嫦娥4号”需要中继星为着陆器与地面提供通信中继服务。位于地-月L2点附近的halo轨道具有与地-月相对静止的几何关系,成为中继星任务轨道的首选目标。
Farquhar[1]最先提出利用地-月L2点实现月背通信的概念,此后许多学者开展了地-月L2点转移轨道的研究。最初的设计思想是借助halo轨道的稳定流形进行设计,由于地-月L2点附近halo轨道的稳定流形无法与地球停泊轨道相交,只能通过设计脉冲转移轨道进行拼接[2-5]。Parker[6]则采用弱稳定边界转移策略,将日地-地月系统的不变流形进行了拼接,获得了低能量的转移轨道,但该方法存在转移时间过长的问题。Gordon[7]提出利用月球引力降低流形进入所需的速度增量,该方法比直接转移能够减少所需速度增量,同时相对弱稳定边界转移所需的飞行时间大大降低,其本质上讲是一种月球近旁转移轨道。李明涛[8]在此基础上进行了改进,提出一种基于微分修正算法的三脉冲转移轨道,张景瑞和曾豪等[9-10]则针对不同约束下的近旁转移轨道进行了设计分析,分析了不同飞越高度、飞越机动相位角和halo轨道入轨点对转移轨道和燃耗的影响,但其设计方法并未考虑地月转移轨道的发射约束条件。
对于部署在地-月L2点的中继星,转移轨道设计存在大量工程约束。首先中继星的部署应尽可能地避免月球对地球与中继星的通讯阻挡。徐明等[11]分析了地月L2点附近Lissajous轨道对日-地-月系统的跟踪规律,发现无论何种尺寸的Lissajous轨道均存在月球遮挡,即无法通过一颗卫星完成中继通讯任务。由于我国发射场的地理位置约束,地月转移轨道的发射倾角存在一定的限制;同时中继部署任务需在“嫦娥4号”发射之前完成,因此中继转移时间不应过长;此外,中继星需要长期在轨运行,在卫星燃料有限的情况下,应尽可能地降低转移轨道所需燃耗,延长中继星的在轨寿命。
本文针对中继转移轨道存在的约束限制条件,对采用月球近旁的地-月L2点转移轨道进行了研究。基于限制性三体模型,分析了halo轨道与地-月的跟踪规律,并对halo轨道族的选择与月背着陆点的关系进行了分析。在考虑转移轨道倾角等约束的条件下,采用微分修正算法对不同近月点飞越高度的直接转移轨道和不同halo轨道尺寸的拟流形入轨转移轨道进行拼接。仿真结果表明了这种方法的有效性,从而可为未来我国“嫦娥4号”中继星的转移任务提供借鉴与参考。
1 动力学模型与目标轨道分析
1.1 限制性三体模型
如图 1所示,限制性三体模型动力学系统中考虑质量可以忽略的第三体S3在两个主天体S1和S2的引力共同作用的运动,三者质量关系为。在中继星轨道设计中,选择地球和月球分别作为主天体S1和S2,在质心旋转坐标系下建立动力学方程。该坐标系选择地月系统的质心为原点,x轴方向由原点指向月球,z轴为月球公转方向,y轴与x、z轴构成右手坐标系。则探测器的运动为
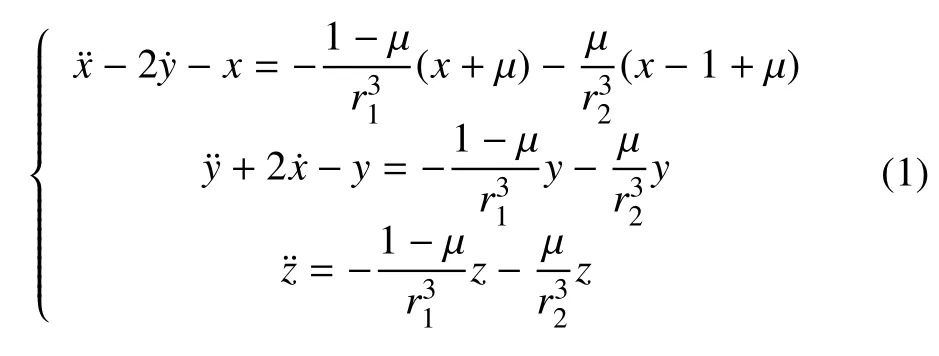

图1 限制性三体问题几何关系Fig.1 Geometric relationship of restricted three body problem
令式(1)中速度和加速度等于0,经推导和求解,可得5个平衡点(拉格朗日点)[12],这5个平衡点中有3个(L1、L2和L3)是共线平衡点,另外2个(L4和L5)呈等边三角形分别分布在地月两侧。其中地-月L2点位于地月连线月球外侧,为进一步研究地-月L2点附近的轨道动力学特性,可将动力学方程在平衡点附近线性化[13],获得以下形式的稳定解为

其中:α、β分别为旋转坐标系下轨道平面和垂直振幅;κ为常数;λ和v分别为轨道平面和垂直方向的运动的频率;φ和φ轨道平面和垂直方向的初始相位角。
当λ≠v时,轨道形式为Lissajous轨道,属于非周期轨道,振幅α和β为相对独立;当λ=v时,轨道形式为halo轨道,振幅α和β不独立,有一定的约束条件,此时φ=φ,属于周期性轨道。利用式(2)作为平衡点附近halo轨道的初值,通过多重打靶法[14]等方法可以得到halo轨道的精确数值解。
1.2 目标轨道族分析
限制性三体系统的引力场关于x-y平面是对称的,因此可以将halo轨道根据方向分布分为南族和北族halo轨道。图 2和图 3分别是地月旋转系下L2点不同振幅下的南族halo轨道和北族halo轨道。
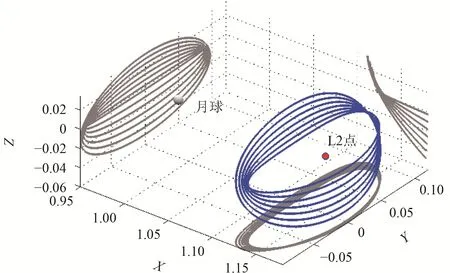
图2 地月L2点南族halo轨道Fig.2 Southern family of the Earth-Moon L2 halo orbits

图3 地月L2点北族halo轨道Fig.3 Northern family of the Earth-Moon L2 halo orbits
考虑到地-月L2点附近Lissajous轨道对地跟踪均存在月球遮挡,即无法通过一颗卫星完成中继通讯任务,这里选取halo轨道进行跟踪条件分析。由于halo轨道为周期性轨道,故选择地月质心旋转坐标系,计算一个周期内月球对地球和中继星的阻挡情况。阻挡情况的计算方法选取圆锥模型进行计算,模型示意图如图 4所示。这里将月球部分遮挡和月球完全遮挡均视为月球遮挡,其判别条件参考文献[15]中的日蚀条件的判别方法。

图4 对地跟踪圆锥模型Fig.4 The cone model diagram for tracking Earth
由于南北族halo轨道关于x-y平面对称,则相同振幅条件下月球遮挡相同,故以南族halo轨道为例选取不同振幅进行分析,其计算结果如表 1所示。由表中结果可以看出,在理想模型下,halo轨道振幅超过4 000 km即可实现对地无遮挡跟踪。而在实际工程任务中,对halo轨道进行轨道维持会使halo轨道的振幅产生一定的偏移[16],因此使命轨道尽可能选取较大尺寸的halo轨道。

表1 不同振幅halo轨道对地跟踪规律Table 1 The relations between the amplitudes of halo orbits and the tracking laws
对于南族halo轨道,将轨道投影到旋转系y-z平面上,可以看出在一个轨道周期内卫星处于x-y平面之下部分相对较多。选取不同振幅的南族halo轨道,在一个周期内卫星位于南半球上空的时间百分比如图 5所示。从图 5中可以看出,随着振幅的增加卫星在南半球上空的时长也有所增加,且比例均在60%以上,因此适合为月背南半球探测提供中继服务;而北族halo轨道则适合作为月背北半球探测的中继星使命轨道。实际工程任务中可以根据着陆点的选择进行详细分析。

图5 南族halo轨道南半球上空时间百分比Fig.5 Percentage of time over the southern hemisphere for southern family halo orbits
2 月球近旁转移轨道设计
根据转移所需的时间和速度增量,转移轨道可以分为3类。第一类为直接转移轨道[4],这类转移轨道设计较为简单且转移时间较短,但速度增量相对较大;第二类是低能量的转移轨道,该类转移轨道有多种方式,它们的共同点是所需速度增量较小但飞行时间较长,其中最典型的是利用弱稳定边界(WSB)的转移轨道[6];第三类转移轨道为利用月球近旁的转移轨道[8],这类轨道需要在探测器到达近月点时施加一次机动,进入目标轨道的流形或拟流形实现转移。此类方法得到的轨道转移时间适中,速度增量相对较小。由于中继星转移同时存在转移时间和燃耗约束,因此,月球近旁转移成为转移轨道设计的首选方案。
2.1 转移轨道设计方法
月球近旁转移首先利用地月转移轨道将探测器转移至月球近月点,然后在近月点施加一次机动,进入目标轨道的流形或拟流形(即在平衡点附近周期轨道上施加较大扰动获得的流形)。因此根据近月点机动将月球近旁转移轨道分为两部分:地月直接转移段和地月动平衡点附近周期轨道拟流形的入轨转移段分别进行设计并拼接。两段转移轨道分别是两点边值问题,选取合适的庞加莱截面,采用带有约束的微分修正算法对两段轨道进行拼接,即得到完整的月球近旁转移轨道。转移设计方法示意图如图 6所示,下面给出具体设计方法。
首先根据任务需求选择目标halo轨道的方向和振幅,然后在旋转坐标系下对目标halo轨道不同相位施加较大扰动生成由halo轨道趋向于月球的稳定拟流形。这些稳定拟流形轨道为“管状”构型,根据不同需求可以选择不同的庞加莱截面[12]。基于前者的研究[8-10],完整的月球近旁转移轨道需要在月球近拱点施加机动。故这里选择r·v= 0为庞加莱截面约束,庞加莱截面如图 7所示。给定近月点飞越高度,调整稳定拟流形生成所需的扰动大小,可得到满足飞越高度约束的多组近月点拼接状态以及拟流形入轨转移所需时间。之后,根据不同地月转移时间,将近月点拼接状态转换到惯性系下得到星历模型下的地月转移轨道。对于给定一组近月点拼接状态,优化地月转移时间以获得最小的拼接速度增量。最后,再根据旋转坐标系下稳定拟流形的入轨相位和转移时间,采用微分修正算法得到星历模型下拟流形入轨转移段。

图6 转移轨道设计方法示意图Fig.6 The design method diagram of transfer orbit

图7 庞加莱截面图Fig.7 The poincare section of halo orbit
地月直接转移轨道的设计方法相对成熟,具体参考文献[17-18]。转移轨道的初始状态约束条件如表 2所示,末端状态约束由拟流形转移段生成的近月点拼接状态。采用微分修正算法,修正的控制变量为初始速度大小v0、升交点赤经Ω和近地点幅角ω。目标修正量为庞加莱截面上位置拼接状态初始状态和末端状态可以表示为[19]

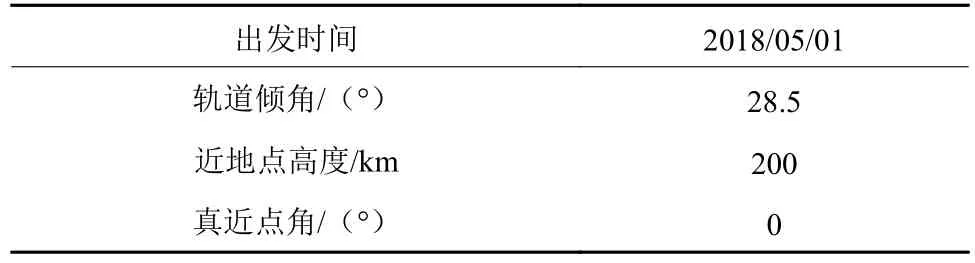
表2 转移轨道约束条件Table 2 The constraint of transfer orbit
两状态之间的微分修正关系可线性化表示为
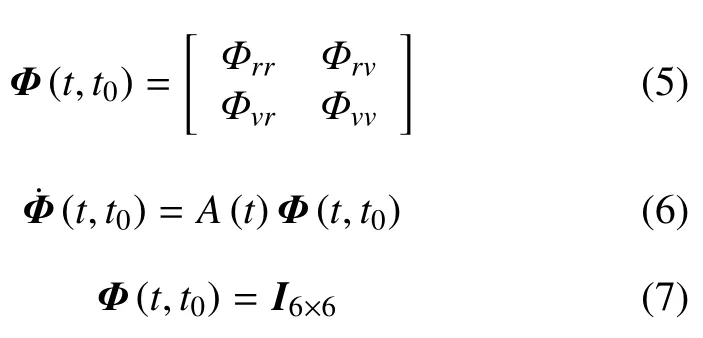
其中:矩阵Α(t)的具体表达式可参考文献[12],故t时刻的单位状态,转移矩阵可以通过初始条件的数值积分得到。在完成轨道位置状态拼接后,其速度状态之差即为月球近旁机动所需速度增量。拟流形入轨转移段的微分修正方法与地月转移段的方法类似,此时始末状态均采用惯性系下的位置进行表示,则两状态之间的微分修正关系可简化为

最后对不同近旁机动和入轨机动的转移轨道进行分析,选择两次速度增量之和最小的轨道作为给定约束条件下的转移方案。
2.1 转移轨道设计方案
选择南族halo轨道作为任务轨道进行设计分析,考虑整个转移过程的时间约束不超过1个月。以z向振幅为3 000 km的halo轨道为例,转移轨道的月球飞越高度为100 km,其转移结果如图 8所示。卫星首先经过5.007 d的飞行到达月球近拱点,施加187.090 m/s的机动后进入拟流形入轨转移段,再经过12.783 d的时间施加26.509 m/s的入轨机动进入任务使命轨道。卫星逃逸由火箭上面级提供完成,整个转移过程耗时17.790 d,所需速度增量共213.599 m/s。

图8 月球近旁转移轨道示意图Fig.8 The diagram of transfer orbit using Lunar flyby
3 仿真结果分析
针对月球近旁转移轨道,分析不同振幅的halo轨道和不同月球飞越高度对转移轨道的影响。这里限定整个转移任务耗时不超过一个月。选取halo轨道z向振幅3 000~15 000 km,固定月球飞越高度为100 km时,转移结果如表 3所示,固定halo轨道z向振幅3 000 km时,选取近月点飞越高度100~2 000 km,转移轨道的结果参数如表 4所示。

表3 不同z向振幅的halo轨道转移结果(飞越高度100 km)Table 3 The results of transfer orbit with different amplitudes of halo orbit(flyby height:100 km)

表4 不同近月点高度halo轨道转移结果(振幅3 000 km)Table 4 The results of transfer orbit with different flyby heights(amplitudes of halo orbit:3 000 km)
由表 3可以看出,随着目标轨道振幅的增大,采用月球近旁转移的总速度增量也增大,其中入轨机动的速度增量变化明显,同时总转移时间也缓慢增加。而对于不同近月点高度约束的转移轨道,由表 4可以知,近月点高度越高,转移消耗越大。近旁机动随近月点高度增大而明显增加,而入轨机动基本保持不变。表明近旁轨道高度越高,采用月球近旁转移的效率越低。此外增大月球飞越高度会缩短地月转移时间但增大了流形转移时间,总转移时间基本不变。
最后对不同约束下转移轨道的halo入轨点进行分析,z项振幅3 000 km的入轨点分布如图 9所示,“*”标记即为相应的入轨点。这里定义在旋转坐标系下入轨点相对L2点在x-y平面上的投影与x轴正向的夹角为相位角。从图中可以看出,无论是改变halo轨道振幅还是近月点高度,其入轨位置分布相对集中,对应的halo轨道的入轨相位主要集中在90°~125°之间。在该相位区间生成的拟流形入轨转移轨道的转移时间在12~15 d之间而地月转移段的飞行时间均小于6 d,因此采用月球近旁转移的转移时间满足不超过1个月的任务要求。而对于该类转移轨道,halo轨道振幅选为9 000 km,采用月球近旁100 km的转移轨道,其速度增量也只有258.793 m/s。在实际任务中若采用火箭上面级推送卫星入轨,相比于文献[4]中设计的直接转移可以节省300~700 m/s的速度增量。

图9 转移轨道入轨点分布图(振幅3 000 km)Fig.9 The distribution diagram of transfer orbit injection point
4 结 论
针对“嫦娥4号”中继星的转移轨道设计问题,本文系统地研究了基于月球近旁的地月L2点转移轨道设计方法,通过选取合适的庞加莱截面,采用微分修正算法将直接转移轨道与平衡点附近周期轨道的拟流形转移轨道进行拼接。该方法具有相对较短的转移时间和较少的燃料消耗,并且能够满足转移轨道的逃逸约束。通过分析转移轨道参数可以看出,选择的halo轨道振幅越小,月球近旁的轨道高度越低,转移所需速度增量越小,且整个任务的转移时间不超过一个月。上述结果可为我国未来“嫦娥4号”中继星任务轨道设计提供一定的借鉴与参考。
[1]Farquhar R W.Lunar communications with libration-point satellites[J].Journal of Spacecraft & Rockets,1967,4(10):1383-1384.
[2]Farquhar R,Muhonen D,Richardson D.Mission design for a halo orbiter of the Earth[J].Journal of Spacecraft & Rockets,1976,(14):170-177.
[3]Hiday-Johnston L A,Howell K C.Impulsive time-free transfers between halo orbits[J].Celestial Mechanics & Dynamical Astronomy,1996,64(4):281-303.
[4]Parker J S,Born G H.Direct Lunar halo orbit transfers[J].The Journal of the Astronautical Sciences,2008,56(4):441-476.
[5]Hechler M.Launch windows for libration point missions[J].Acta Astronautica,2009,64(2-3):139-151.
[6]Parker J S.Families of low-energy Lunar halo transfers[J].Advances in the Astronautical Sciences,2006(124):1-20.
[7]Gordon D.Transfers to Earth-Moon L2 halo orbits using Lunar proximity and invariant manifolds[D].West Lafayette:School of Aeronautics and Astronautics,Purdue University,2008.
[8]李明涛.共线平动点任务节能轨道设计与优化[D].北京:中国科学院研究生院,2010.Li M T.Low energy trajectory design and optimization for collinear libration points missions[D].Beijing:Graduate School of Chinese Academy of Sciences,2010.
[9]张景瑞,曾豪,李明涛.不同月球借力约束下的地月halo轨道转移轨道设计[J].宇航学报,2016,37(2):159-168.Zhang J R,Zeng H,Li M T.A design method for Earth-Moon halo orbit transfer trajectory under different constraints to Moon gravityassisted maneuvers [J].Journal of Astronautics,2016,37(2):159-168.
[10]Zeng H,Zhang J R.Design of impulsive Earth-Moon halo transfers:Lunar proximity and direct options[J].Astrophysics & Space Science,2016,361(10):1-17.
[11]徐明,徐世杰.地月系L2点Lissajous轨道卫星对地月的跟踪规律研究[J].宇航学报,2008,29(1):59-65.Xu M,Xu S J.The tracking laws relative to Earth-Moon of spacecrafts on the Lissajous orbits around L2 point[J].Journal of Astronautics,2008,29(1):59-65.
[12]崔平远,乔栋,崔祜涛.深空探测轨道设计与优化[M].北京:科学出版社,2013.Cui P Y,Qiao D,Cui H T.Design and optimization of deep space exploration trajectory[M].Beijing:Science Press,2013.
[13]刘林,侯锡云.深空探测器轨道力学[M].北京:电子工业出版社,2012.Liu L,Hou X Y.Orbit dynamics of deep space probe[M].Beijing:Publishing House of Electronics Industry,2012.
[14]Canalias E,Masdemont J J.Computing natural transfers between Sun-Earth and Earth-Moon Lissajous libration point orbits[J].Acta Astronautica,2008,63(1):238-248.
[15]Oliver M B,Eberhard G.卫星轨道:模型、方法和应用[M].王家松,祝开建,胡小工,等,译.北京:国防工业出版社,2012.Oliver M B,Eberhard G.Satellite orbits models,methods and applications[M].Wang J S,Zhu K J,Hu X G,et al,translation.Beijing:National Defense Industry Press,2012.
[16]刘磊,曹建峰,胡松杰,等.地月平动点中继应用轨道维持[J].深空探测学报,2015,2(4):318-324.Liu L,Cao J F,Hu S J,et al.Maintenance of relay orbit about the Earth-Moon collinear libration points[J].Journal of Deep Space Exploration,2015,2(4):318-324.
[17]高玉东.月球探测器地月空间转移轨道研究[D].长沙:国防科学技术大学,2008.Gao Y D.Study on the cis-Lunar transfer trajectory of the Lunar probe[D].Changsha:National university of Defense Technology,2008.
[18]周文艳,杨维廉.嫦娥二号卫星轨道设计[J].航天器工程,2010,19(5):24-28.Zhou W Y,Yang W L.Orbit design for Chang’E-2 Lunar orbiter[J].Spacecraft Engineering,2010,19(5):24-28.
[19]周文艳,杨维廉.月球探测器转移轨道的中途修正[J].宇航学报,2004,25(1):89-92.Zhou W Y,Yang W L.Mid-correction of trans-Lunar trajectory of Lunar explorer[J].Journal of Astronautics,2004,25(1):89-92.
Design of Earth-Moon L2 Halo Orbit Transfer Trajectory for Relay Satellite Using Lunar Flybys
SUN Chao1,2,TANG Yuhua1,LI Xiangyu1,2,QIAO Dong1,2
(1.School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China ;2.Key Laboratory of Autonomous Navigation and Control for Deep Space Exploration,Ministry of Industry and Information Technology,Beijing 100081,China)
The satellite on Earth-Moon L2 periodic orbit will provide communication relay for CE-4,China’s first Lunar landing exploration mission on the moon’s far side.The transfer orbit design plays an important role in the implementation of the relay mission.Considering the constrains on transfer time,flyby altitude and amplitude of the halo orbits,this paper systematically studies the Earth-Moon L2 transfer trajectory using Lunar flybys.First,based on the restricted three-body problem(RTBP),the visibility of the landing point with different families of halo orbits is analyzed.Then,the transfer orbit is divided into Earth-Moon direct transfer segment and quasi manifolds associated with halo orbits.The differential correction algorithm with state constraints is employed to match the two segments.Finally,aiming at southern family of halo orbits,the influence of orbit amplitude and Lunar flyby altitude on the cost of transfer as well as orbit insertion phase are discussed respectively.The simulation shows the feasibility and engineering advantages of lunar flyby transfer.
Earth-Moon L2 point;relay satellite;Lunar flyby;transfer orbit
V412.4+1
A
2095-7777(2017)03-0264-06
[责任编辑:杨晓燕,英文审校:任树芳]
10.15982/j.issn.2095-7777.2017.03.010
孙超,唐玉华,李翔宇,等.地-月L2点中继星月球近旁转移轨道设计[J].深空探测学报,2017,4(3):264-269,275.
Reference format:Sun C,Tang Y H,Li X Y,et al.Design of Earth-Moon L2 halo orbit transfer trajectory for relay satellites using Lunar flybys[J].Journal of Deep Space Exploration,2017,4(3):264-269,275.
2016-12-01
2017-03-30
新世纪优秀人才支持计划支持项目;国家自然科学基金项支持项目(11572038);“飞行器动力学与控制”111引智创新基地支持项目
孙超(1993- ),男,硕士研究生,航空宇航科学与技术专业,主要研究方向:航天器轨道设计与优化。
通信地址:北京理工大学宇航学院(100081)
E-mail:sunchao5524@163.com
乔栋(1979- ),男,教授,博士生导师,主要研究方向:深空探测轨道动力学与控制、轨道设计与优化。本文通信作者。
通信地址:北京理工大学宇航学院(100081)
E-mail:qiaodong@bit.edu.cn
猜你喜欢
数学物理学报(2020年2期)2020-06-02
数学年刊A辑(中文版)(2019年3期)2019-10-08
数学物理学报(2019年1期)2019-03-21
数据采集与处理(2018年6期)2018-12-19
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年25期)2016-07-23
航天器工程(2015年3期)2015-10-28
振动工程学报(2015年2期)2015-03-01
