
基于PLC的水平动力猫道自动控制系统研制
2017-10-09 08:43张强林康何庆王议田德宝
电气自动化 2017年3期
张强,林康,何庆,王议,田德宝
(1.宝鸡石油机械有限责任公司,陕西 宝鸡 721002;2. 国家油气钻井装备工程技术研究中心,陕西 宝鸡 721002)
基于PLC的水平动力猫道自动控制系统研制
张强1,2,林康1,2,何庆1,2,王议1,2,田德宝1,2
(1.宝鸡石油机械有限责任公司,陕西 宝鸡 721002;2. 国家油气钻井装备工程技术研究中心,陕西 宝鸡 721002)
水平动力猫道是石油钻机的关键自动化设备之一,取代了传统钻井作业过程中依靠风动绞车、绳索实现钻杆上、下钻台的方式,采用PLC控制与液压驱动相结合的方式,所有操作均通过无线遥控方式实现,能够很好的保证操作人员及设备的安全。控制系统通过在产品样机的动作试验,各项功能满足油田现场使用要求。
石油钻机;水平猫道;PLC;控制系统;应用
Abstract: The level power catwalk, one of the key automatic equipment of the oil rig, replaces traditional drilling operation which depends on the wind-driven winch and rope to enable the drill pipe to move up and down the drill floor. By means of combined PLC control and hydraulic drive, all its operations are realized through wireless remote control, thus ensuring the safety of operating personnel and equipment. This control system has passed operation test on prototype products and all its functions meet the requirements for application on oil fields.
Keywords: oil rig; level catwalk; PLC; control system; application
0 引 言
水平动力猫道是一种新型的管柱输送设备,适用于陆地钻机及海上钻井平台,用来完成钻杆、钻铤、套管等管柱的自动化输送作业,实现高效、安全、低作业强度的管柱输送,有效解决目前普遍存在的管柱输送劳动强度大、作业效率低等问题;借助于PLC程序控制,能够实现自动化操作和安全互锁保护机制,大大提高了作业的安全性和可靠性[1]。
1 自动控制系统总体设计
1.1 系统功能

图1 水平动力猫道整体结构
水平动力猫道机械部分由支撑机构和猫道主体组成(如图1所示)。猫道主体包含大车、小车、装载板、卸载板、抬升臂和机械臂等执行机构。在管柱输送过程中,通常与抓管吊机、排管机等其它设备配合,完成管柱在地面管子堆场或平台甲板区到钻台区之间的管柱输送任务。
猫道的管柱输送流程为,当装载操作时,首先大车运行至装载位置,抓管吊机将管柱抓放在猫道装载板上。其次,由装载板与卸载板配合使得一根管柱滚落至V形槽中,小车推动管柱至卸载位置。然后,抬升臂升起,将管柱一端抬升至合适位置,排管机械手下降抓住管柱一端进行提升。在此过程中小车后退至起始位置,机械臂摆动,扶住管柱使其平稳上升直至完全交给排管机械手。最后,机械臂复位,大车退至起始位置,管柱装载过程执行完毕。管柱卸载过程工序与装载过程工序相反。
基于以上对管柱输送过程的分析可知,自动控制系统要实现的功能有[2]:
(1)参数采集功能。对猫道主体中的各部件运行状态参数进行实时采集。
(2)数据处理功能。通过传感器将各部件的实时状态数据传输至PLC中,经控制程序的运算与处理后,将结果转换为控制信号经执行器施加在被控对象上。与此同时,对相关部件的实时状态信息与设定状态信息进行不断循环比较计算,以便能够及时调整部件的控制信号,使其实时状态信息与设定状态信息能够保持一致。
(3)驱动功能。能够控制与驱动相关部件的开启与关闭或者运行与停止等功能。
故水平动力猫道的主要控制对象如表1所示。
1.2 系统的总体设计与要求
水平动力猫道自动控制系统的原理如图2所示。操作人员在司钻房内通过座椅或者在现场通过遥控手操盒向控制系统发出运行控制命令,无线模块接收器接收到此命令通过PRIFIBUS-DP现场总线发送至 PLC。PLC对接收到的用户指令与通过传感器反馈的现场部件的实时状态信息进行比较、运算和处理,并将最终结果以控制信号的形式发送至执行元件,用以驱动猫道部件的运行,实现了对大车、小车、装载板、卸载板、抬升臂和机械臂的控制。控制系统可实时的对各部件的运行状态信息与设定状态信息进行对比分析,再对系统参数进行修正,以达到设定控制状态。

表1 水平动力猫道控制对象

图2 水平动力猫道自动控制系统原理图
针对水平动力猫道的特殊应用场合,本控制系统采用两种控制模式,即本地控制与远程控制。
水平动力猫道自动控制系统的性能要满足以下要求[3]:
(1)安全性。无论是对于人还是设备安全性都是首先要进行考虑的。控制系统必须保证设备能够安全地运行,并且在意外发生时能够及时停止设备地运行最大限度地保证人员的安全。
(2)可靠性。系统的可靠性和稳定性必须能够满足在恶劣环境条件下的要求,能够克服外界干扰并且能避免因供电异常对系统产生的冲击。尤其是采用无线遥控通讯技术,必须确保信号传输的连续稳定。
(3)系统在线功能要良好,能够及时在线检测出猫道各部件的状态信息,并且能够按照设定值准确地对各部件的状态进行调整。
2 系统设计与实现
2.1 安全设计
水平动力猫道急停安全设计基于PHOENIX安全继电器,以物理硬线连接供电模块及PLC的相关模块,并串联分布在不同位置的急停开关。紧急停止信号并不进入PLC的CPU模块,这样使得无论PLC控制系统是否正常,当现场出现紧急情况后都可以在第一时间停止设备的运行,从而保证人员与设备的安全。
同时,软件系统也设计了安全保护机制,即:通过看门狗实时监测总线通讯的状态,设定通讯延迟时间上限,一旦总线通讯异常并且延迟时间达到并超过此时间上限,控制系统即认为通讯中断需停止设备运行,从而令设备自动停机,以备人员检查故障原因。
传感器安全设计同通讯安全设计,在软件程序中对传感器的输出信号设定上下限,当信号超过设定的上下限时,可执行相关的后续处理程序。
2.2 硬件选型
水平动力猫道控制采用西门子S7-300 PLC为主控制器,结合液压电比例负载敏感控制技术,实现对大车、小车、装载板、卸载板、抬升臂和机械臂等部件的运功控制。
PLC控制器是控制系统的核心部分,其担负着数据处理和通信联网的功能。在此系统中不仅要考虑猫道各部件的逻辑与运动控制还要考虑与无线模块接收器的通讯连接问题。所以PLC控制器中CPU模块选用带有集成PROFIBUS-DP接口的315-2DP型号,并配有相关电源与信号模块(基本选型信息如表2所示);无线接收与发送模块采用HETRONIC品牌,用来实现对猫道实时控制,显示运行状态、数据及报警信息等。

表2 水平动力猫道S7-300主要模块信息
2.3 软件设计
控制系统软件编程基于STEP7软件,采用模块化编程方式来实现对猫道各个部件的实时控制。这样做的好处是各模块之间功能单一、相对独立和具有清晰结构,可以重复调用,能够获得较高的控制质量。STEP7软件为这种模块化编程提供了很好的设计平台,其配置了强大的OB、SFB和SFC块及一些功能模块来提供中断、软硬件故障诊断、通讯等功能[4]。
根据模块化编程思想,在本系统中控制流程如图3所示。
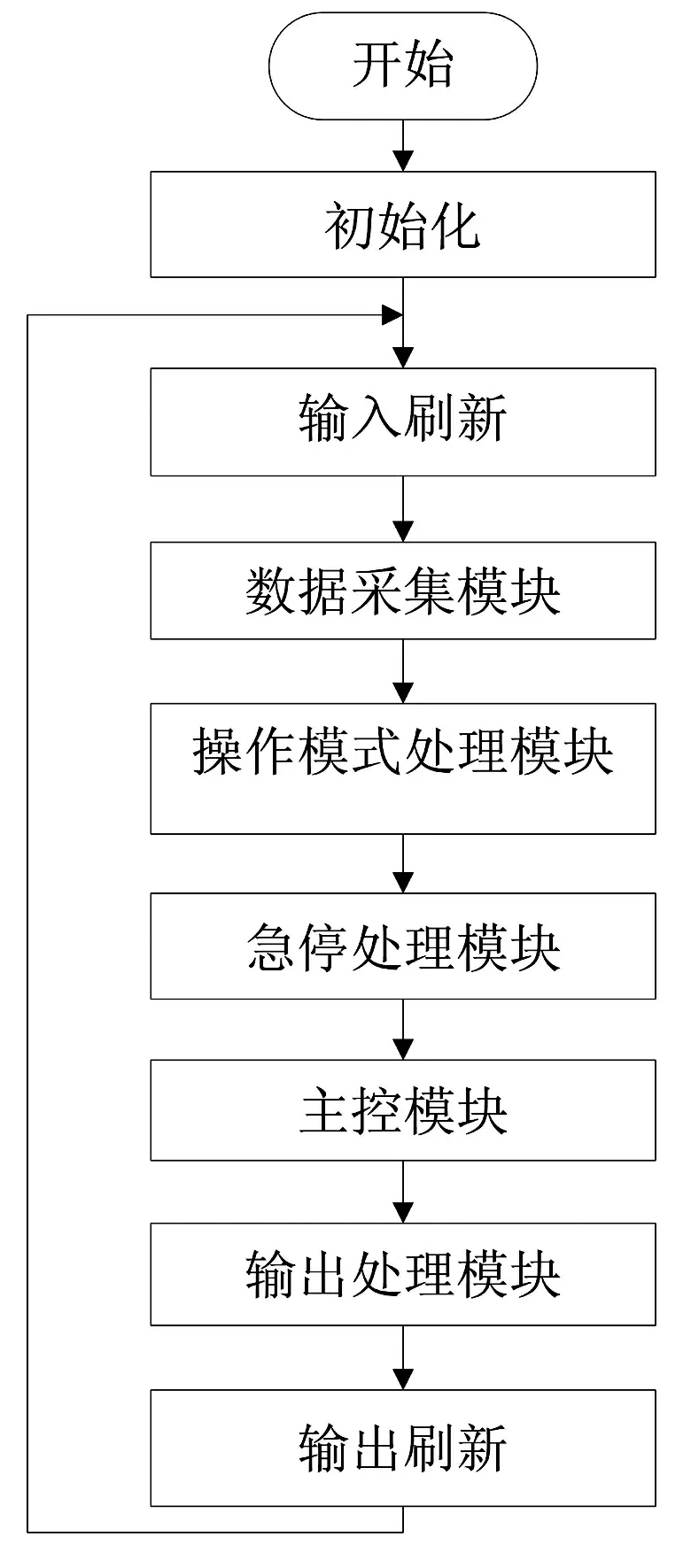
图3 水平动力猫道控制流程框图
(1)数据采集模块用于采集来自外部的各种输入数据,包括司钻座椅的操作输入、HMI程序的参数设置、防碰设备的防碰数据等。
(2)操作模式处理模块用于处理本地液压操作、遥控盒操作及集成司钻操作之间的切换。
(3)输入处理模块用于基于选中的操作模式,对数据采集模块采集的数据进行分析处理。
(4)急停处理模块用于处理硬件急停、通信中断急停、软件急停及急停复位等。
(5)主控模块为各部件的控制模块包,包括大车控制模块、小滑车控制模块、装载板控制模块、卸载板控制模块、抬升臂控制模块及机械臂控制模块。
(6)输出处理模块用于处理程序对于输出数据,包括用于控制现场液压阀动作的模拟量和开关量输出、用于集成司钻HMI显示的设备状态信息输出、用于遥控盒液晶屏显示的设备状态信息输出、用于防碰的数据输出。
结合PLC控制程序,使用WinCC软件设计HMI程序用于水平动力猫道的实时状态显示及监控[5],如图4所示。
3 现场试验
采用室外和模拟现场应用的方式对水平动力猫道自动控制系统的精度和性能进行了测试,结果表明,该控制系统其稳定性、准确性和快速性满足设计要求,性能表现优异。基于无线遥控操作方式,大大提高了人员和设备的安全性及降低了

图5 水平动力猫道现场试验
工人劳动强度。现场试验图片如图5所示。
4 结束语
水平动力猫道的应用,可以极大地提高陆地及海上钻井平台管柱输送作业的效率。基于S7-300PLC的海洋水平动力猫道控制系统的应用,可以使钻井过程中的起下钻操作简单安全,减少作业人员的工作强度和施工危险,提高整体的工作效率,使钻机的整体水平和自动化水平得到进一步提高。经现场试验表明,该控制系统能够满足设计和现场作业要求。
[1] 赵淑兰,李文彪,聂永晋,等.动力猫道技术国内外现状和发展趋势[J].石油矿场机械,2010,39(2):13-15.
[2] 廖常初.S7-300/400PLC应用技术[M].北京:机械工业出版社,2005.
[3] 邱宗斌,李启新,武志学.基于PLC的混砂车自动控制系统研究[J].石油矿场机械,2015,44(12):74-76.
[4] 崔坚.西门子工业网络通信指南[M].北京:机械工业出版社,2004.
[5] 甄立东.西门子WinCC V7基础与应用[M].北京:机械工业出版社,2011.
Development of an Automatic Control System for Level Power Catwalks Based on PLC
Zhang Qiang1,2, Lin Kang1,2, He Qing1,2, Wang Yi1,2, Tian Debao1,2
(1. Baoji Petroleum Machinery Co. Ltd., Baoji Shaanxi 721002, China; 2.National Engineering Research Center for Oil and Gas Drilling Equipment, Baoji Shaanxi 721002, China)
10.3969/j.issn.1000-3886.2017.03.034
TP271
A
1000-3886(2017)03-0113-03
定稿日期: 2016-10-18
本文由中石油现场试验项目《5000~7000米钻机管柱自动化处理系统现场试验》课题项目资助,课题编号2011B-4301
张强(1984-),男,陕西乾县人,工程师,硕士,现从事石油装备控制系统设计工作。 林康(1984-),男,福建漳平人,工程师,本科,现从事石油装备控制系统设计工作。 何庆(1987-),男,河南商丘人,工程师,硕士。现从事石油装备控制系统设计工作。 王议(1983-),男,陕西汉中人,工程师,硕士。现从事石油装备控制系统设计工作。 田德宝(1983-),男,河南信阳人,工程师,硕士。现从事石油装备设计及配套工作。
猜你喜欢
云南化工(2021年8期)2021-12-21
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
中国煤层气(2021年5期)2021-03-02
中国特种设备安全(2019年1期)2019-03-13
制造技术与机床(2018年9期)2018-09-19
故事作文·高年级(2017年10期)2017-10-19
海外华文教育(2017年6期)2017-08-07
小学阅读指南·低年级版(2016年1期)2016-09-10
水电站机电技术(2016年1期)2016-02-28
西南石油大学学报(自然科学版)(2015年5期)2015-04-16
