
一种新型工业机器人工装夹具检测系统设计
2017-10-09 08:43章嘉浩魏晓晨马丹严诚斌
电气自动化 2017年3期
章嘉浩, 魏晓晨, 马丹, 严诚斌
(1.上海电气自动化设计研究所有限公司,上海 200023;2.燕山大学,河北 秦皇岛 066004)
一种新型工业机器人工装夹具检测系统设计
章嘉浩1, 魏晓晨2, 马丹1, 严诚斌1
(1.上海电气自动化设计研究所有限公司,上海 200023;2.燕山大学,河北 秦皇岛 066004)
针对工装夹具与工业机器人装配过程中因电气信号匹配修正、气动回路检测导致的多次拆卸问题,提出一种适用于工业机器人的新型工装夹具检测系统,通过机架、电气、气路各模块功能模拟平台,模拟电气信号传输、气动回路连接,进而调整工装夹具的各项安装参数,检测气动元件、电气元件的工作状态,实现工装夹具的预先装配试错。本测试系统对提高工装夹具装配效率,节省项目进度时间具有重要工程意义。
工装夹具;工业机器人;检测系统;信号匹配修正;信号传输
Abstract: Aiming at repeated disassembling necessitated on account of electrical signal match correction and test on pneumatic circuits in the course of assembling of industrial robots and jigs and fixtures, this paper puts forwards a novel system for tests of jigs and fixtures suitable for industrial robots. Transmission of electrical signal and connection of pneumatic circuits are simulated through the simulation platform for the frame as well as electrical and pneumatic modules, so that installation parameters of jigs and fixtures may be adjusted, and working states of pneumatic and electrical components may be tested to realize pre-assembly and error detection of jigs and fixtures. This test system has great engineering importance for the improvement of assembly efficiency of jigs and fixtures and for the saving of time in project implementation.
Keywords: jigs & fixtures;industrial robot;test system;signal match correction;signal transmission
0 引 言
随着工业机器人行业的飞速发展,工业机器人在汽车制造、电子电气、橡胶塑料、化工、食品等领域得到广泛应用[1]。工装夹具作为工业机器人设备中必不可少的工艺装备,在生产实践中用来定位、夹紧,使工具处于相对稳定的位置,从而达到加工和安装的目的,其广泛用于机械加工、装配、检验、热处理、焊接等工艺过程中[2-3]。
工装夹具是机械装备制造业中不可缺少的基础工艺元素[4]。合理、正确地使用工装夹具安装和固定各个零部件,是有效完成工作任务的先决条件,对提高生产效率和缩减项目成本有着直接的影响。而对于现阶段存在的装配夹具多耗时、易反复等问题,则势必导致工业生产过程中人力的浪费,降低了生产效率[5-6]。
近来,针对夹具控制方面的探索,采用PLC控制夹具运动的研究较广泛,其中张国政[7]设计了基于PLC控制的气动夹具,采用编制题型程序生成语句表,并实现成功调试;袁清珂[8]等人设计气压驱动系统和PLC控制系统,联合控制工业机器人工装夹具,提高了运动状态下组件的稳定性与实用性;蒙启泳[9]设计了基于PLC控制的自动化夹具教学平台,将夹具本体、气压控制、液压控制有机结合,进一步实现夹具的有效控制。对于定位控制夹具运动的研究,吴玉光[10]提出了建立一系列夹具定位规则,实现了定位基准的自动布局,为夹具运动控制提供了一种有效方法。
为更有效的满足实际工作中工装夹具的检测要求,在考虑多种装配要素的基础上,建立一套适用于工业机器人工装夹具的检测系统方案,采用模块化设计思路,对气动回路、电气回路、组件干涉等装配问题进行测试检验,实现在脱离与工业机器人连接的基础上完成调试任务,达到缩短项目工程时间的目的。
1 工装夹具检测系统方案设计
工装夹具的安装过程不是单一的组件装配问题,更涉及信号传输、气动供给等电气控制问题。为更准确模拟工装夹具与工业机器人装配过程,暴露装配问题,依据工业机器人本体结构及控制过程,采用模块化设计原则,构建工装夹具测试系统。
测试系统由设备台架、工装夹具组件模块、气动驱动模块、电气驱动模块等组成。在工装夹具装配测试过程中,气动驱动模块和电气驱动模块固定安装在设备台架上,工装夹具组件模块的气动元件与气动驱动模块连接,气动驱动模块的驱动部件与电气控制模块连接,将工装夹具安装在带有工业机器人第四、五、六轴的工装夹具组件模块当中,并连接气动模块与电气模块输出管路,对工装夹具进行试错装配。
1.1 工装夹具组件系统
工装夹具装配在机器人末端第六轴处,其运动位姿受工业机器人各关节驱动控制,并涉及线路导线,零件干涉、运动位姿极限等机构问题,因此为更直观、透彻的模拟工装夹具随机构的运动过程,暴露工装夹具装配过程中存在的问题,特此开发工装夹具组件测试系统。

图1 工装夹具组件系统
如图1所示,为模拟工业机器人末端实际运动情况,设计工装夹具组件系统包括工业机器人第四轴、第五轴、第六轴机构,依次模拟对应在实际工业机器人中的各关节驱动机构,实行旋转运动。工业机器人线缆固定架用于机器人抓手处信号线缆走线布局固定使用,工业机工业机器人第六轴机构与工装夹具用法兰连接,工装夹具上下移动机构安装在工业机器人第六轴伸出部分,用来控制工装夹具的轴向平移。
1.2 气动模块检测系统
工装夹具在工业机器人的应用中常用气动装置作为夹具运动的驱动源,因此在工装夹具实际安装前,必须对气动模块中的各项设备进行调节测试,检测气动回路是否通畅,调节满足夹具运动的气压压力等多项工况指标。
为实现工装夹具气动模块的检测要求,设计气动模块检测系统,本系统由气源三联件、节流阀、电磁阀、真空发生器、气缸等组件构成。如图2所示,气源三联件的输出管路上装有节流阀,节流阀的输出端连接有三位五通电磁阀,电磁阀一端与真空发生器连接,另一端与气缸连接,真空发生器的输出端连接至工装夹具气动输入口。在此基础上,所述电磁阀采用三线制24 V磁性开关,气缸通过24 V磁性开关的信号反馈模块控制气缸行程,为便于观测气缸运行状态,安装指示灯系统进行检测,设置磁性开关正负电源线和信号反馈线连接,24 V磁性开关正负电源线与电源正负极相连接,信号反馈线与第一指示灯的正极相连接,第一指示另一端与24 V电源负极相连接。通过电气回路控制电磁阀开关,实现气动回路整体控制,并参照指示灯暗灭判断运行状态。
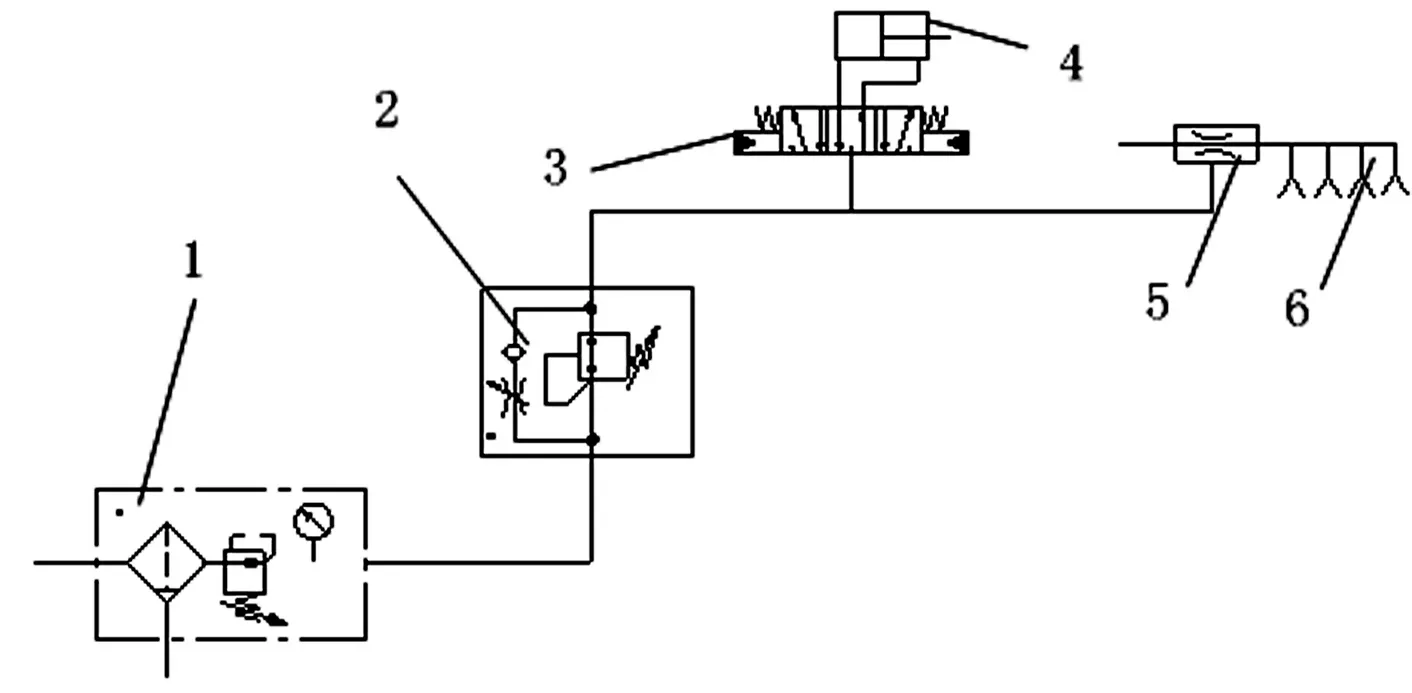
1-气源三联件;2-节流阀;3-三位五通电磁阀;4-气缸;5-真空发生器;6-吸盘图2 气动回路
1.3 电气模块检测系统
工业机器人采用外部接线端子排连接外部电气模块,通过与工业机器人端子排的信号传输,实现示教编程控制,到达与工业机器人运动相结合的工作效果。通常情况下,工装夹具的电气元件信号端与工业机器人控制柜中的信号端子排连接,结合编程控制实现工装夹具的张开闭合,完成工作任务。
为模拟工业机器人电气控制过程,实现电气元件的各项参数检测,设计电气模块检测系统,如图3所示,电气模块系统由第一电气模块控制器、第二电器模块控制器、第三电气模块控制器、24 V电源、真空发生器、电磁阀等组件构成。如图3所示,对电气组件依次连接,第一电气模块控制器一端与24 V正极连接,24 V电源负极与真空发生器连接,进而连接第一电气模块控制器另一端完成闭合回路;第二电气模块控制器一端与24 V电源正极连接,电源负极连接三位五通电磁阀,进而连接第二电气模块控制器另一端完成闭合回路,第三电气模块控制器连接支路与第二电气模块控制器连接支路相同,由此电气控制模块设计完成,采用电气控制系统控制气动回路,检测电气信号传输是否有误。

图3 电气控制图
1.4 模块连接与测试步骤

图4 PLC控制流程图
对整体检测平台进行检测测试,首先将工装夹具安装于平台工装夹具组件模块处,将线缆通过线缆固定架进行走线布局,控制工装夹具组件中第四轴、第五轴、第六轴机构依次模拟对应工业机器人中的驱动机构,做旋转运动。第六轴机构与工装夹具用法兰连接,将工装夹具安装完成后,将各气动元件与气动驱动模块连接,确保气路回路的畅通以及气动元器件的正常使用。将气动驱动模块中的驱动部件,与电气驱动模块连接,通过电气控制的方式,实现自动检测功能。将气动回路连接完成后,打开气源,气动驱动模块与电气驱动模块相连接,部件可以进行手动测试或自动测试,真空发生器可进行自动工作,通过按钮进行启动。气缸需要通过磁性开关信号反馈,以此判断气缸行程是否达到极限位置。磁性开关与电源模块相连接,随后将信号反馈线与指示灯相连接,当气缸上下移动到位后,通过指示灯暗灭状态判断运动是否正常,图4所示为PLC控制流程图。
检测在运动过程中,是否发生部件干涉、运动卡死以及机构卡顿等现象,随后观察输入信号是否有效地输入到位,气动元件的运动逻辑是否符合设计流程,反馈信号是否与设计所需信号一致。
2 系统实验检测
为检验测试系统的实用性,安装常用工装夹具对测试平台进行实验检测,根据信号参数、元件位置、指示灯暗灭等检测因素,调整工装夹具的安装过程,解决测试过程中装配问题,随后依据测试系统各模块的检测信号,安装工装夹具至工业机器人第六轴处,并结合机器人本体控制系统,编程运动程序,对工装夹具的工作性能进行设备检测。
2.1 四爪夹具装配检测
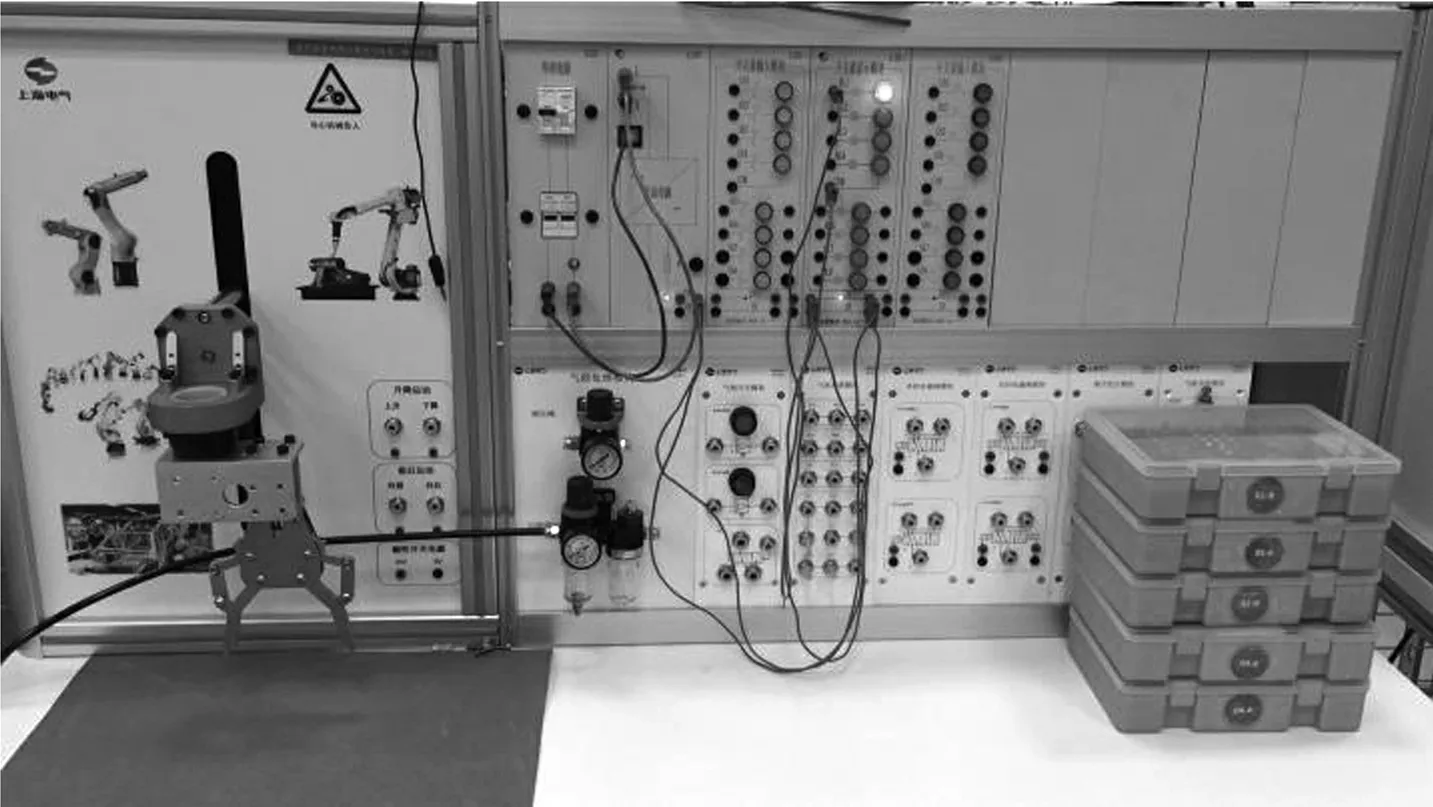
图5 四爪夹具装配故障检测
如图5所示,检测平台左侧为工装夹具组件模块,将四爪夹具安装至工装夹具组件模块的第六轴伸出部分,设置各气动元件与气动驱动模块连接,检测气动回路是否连接正确,将电气驱动模块的各控制按钮与气动回路中各电磁阀连接,并通过指示灯暗灭检测电气回路是否连接正确。在此基础上,根据四爪夹具的实际应用要求,对各磁性开关运动顺序进行编程操作,完成后进行通电测试。观察四爪夹具的运动幅度,判断是否存在干涉,运动卡死等结构故障,调整气压参数、检测各电气信号是否正常,并通过指示灯判断运行状态,以此修正运动过程中出现的各项问题。
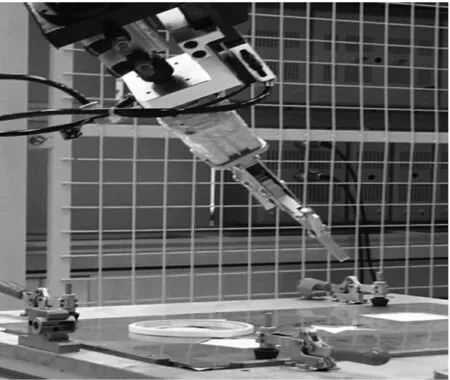
图6 工业机器人工装夹具测试实验
针对检测过程中出现的各类问题,提出解决方案,而后安装四爪夹具于工业机器人末端。如图6所示,四爪夹具通过法兰与工业机器人第六轴连接,参照检测系统调试后的安装过程,将电缆线、气路管道通过线缆固定架走线,避免线机缠绕等装配问题;参照检测装置中的气动模块调试过程,根据气泵压强等各项参数,调节气动连接装置、气缸连接装置、电磁阀连接装置;参照检测装置中电气模块调试过程,将气动装置与工业机器人电气信号柜总端子排连接,并依据调试信号进行逻辑设定;通过对工业机器人进行示教编程,工装夹具可在随机器人运动过程中实现夹取、放置物件的工作任务要求。
通过对四爪夹具实验运动控制检测,并基于工业机器人本体系统安装四爪夹具进行运动测试,实验证明经检测系统安装调试后,可有效避免工装夹具与工业机器人安装过程中的各项问题,实现工装夹具与工业机器人的快速装配,提高工装夹具装配效率。
3 结束语
本文基于工业机器人本体系统,设计工装夹具组件、气动检测、电气检测模块,构建工装夹具检测系统,解决自动化行业中工装夹具与工业机器人装配出现的多次反复修正与微调问题。实验证明,工业机器人工作夹具检测系统能多方面、多层次暴露装配问题,免除实际装配中返工以及重复装配等过程,降低人工装配用时,提高装配工作效率。
[1] 余建军, 任治军, 王辉. 先进焊接工装夹具及其在机械装备制造业中的应用[J]. 机床与液压, 2011, 39(12): 115-121.
[2] 陈晓荣. 工装夹具在生产实践中的设计与应用[J]. 河南科技, 2014,39(8): 69-69.
[3] 高晓兵, 陶华, 顾小锋. 工装夹具增强装配技术研究应用[J]. 计算机应用, 2008, 28(4): 1087-1090.
[4] 融亦鸣, 朱耀祥, 罗振壁. 计算机辅助夹具设计[M]. 北京:机械工业出版社, 2002.
[5] 孙国楠. 焊接工装夹具在机械装备制造业中的发展与应用[J]. 科技与企业, 2014,23(16): 376-376.
[6] 王大红. 浅谈小型工装夹具设计加工的现场经验[J]. 中小企业管理与科技, 2015,24(3):201-201.
[7] 张国政, 刘有余. PLC控制的多工序气动夹具设计[J]. 机床与液压,2012,40(10): 40-44.
[8] 袁清珂, 赵冲, 林立仁. 基于PLC气动式机械手控制系统的设计与开发[J]. 仪表技术与传感器, 2015,52(11): 59-61.
[9] 蒙启泳. 基于PLC的自动化夹具教学实验台的设计与实现[J]. 机械工程师,2014,46(11): 118-120.
[10] 吴玉光. 基于工序要求的夹具定位方案自动规划方法[J]. 机械工程学报,2010, 46(11): 185-192.
Design of a Novel Test System for Jigs and Fixtures of Industrial Robots
Zhang Jiahao, Wei Xiaochen, Ma Dan ,Yan Chengbin
(Shanghai Electrical Automation Design Institute Co., Ltd., Shanghai 200023, China)
10.3969/j.issn.1000-3886.2017.03.035
TU547.6
A
1000-3886(2017)03-0116-03
定稿日期: 2017-03-21
本项研究工作得到了上海市科学技术委员会的资助,资助课题(编号:17DZ2283400)
章嘉浩(1962-),男,上海人,1984年毕业于上海大学工商管理学院精密仪器仪表专业,工程师,从事电气自动化系统设计、制作及系统集成,工业控制(机器人)领域的教育培训解决方案制定与实施。 魏晓晨(1992-) 男, 河北省人,硕士生,就读于燕山大学机械电子工程专业,从事机器人结构方面研究。 马丹(1981-),女,上海人,2003年毕业于上海交通大学计算机科学与技术专业,工程师,从事电气自动化系统设计,工业机器人应用,机电类职业培训标准题库开发。 严诚斌(1991-),男,上海人,2013年毕业于上海电机学院机电一体化专业,从事电气自动化系统设计、方案设计,工业控制(机器人)领域的教育培训解决方案制定与实施。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
哈尔滨轴承(2021年1期)2021-07-21
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2021年1期)2021-05-21
哈尔滨轴承(2021年4期)2021-03-08
防爆电机(2020年6期)2020-12-14
模具制造(2019年4期)2019-06-24
测控技术(2018年9期)2018-11-25
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年10期)2017-11-28
