
采样机械臂关节月表环境适应性设计
2017-11-06 07:40林云成李德伦
航天器环境工程 2017年5期
王 康,张 沛,林云成,李德伦
(空间智能机器人系统技术与应用北京市重点实验室,北京空间飞行器总体设计部,北京 100094)
采样机械臂关节月表环境适应性设计
王 康,张 沛,林云成,李德伦
(空间智能机器人系统技术与应用北京市重点实验室,北京空间飞行器总体设计部,北京 100094)
文章针对月球表面采样任务对机械臂关节防尘、耐高低温和轻量化的特殊要求,提出一种由永磁同步电机驱动、2K-H行星减速器+谐波减速器传动的关节设计方案。该方案采用电机的齿槽转矩提供关节制动力矩,并采用前馈力矩补偿控制的方法消除齿槽转矩引起的速度波动,节省了制动器的配置;通过控制减速器传动侧隙、电机定子与壳体的过盈量及密封垫片厚度,实现关节在-100~160 ℃高低温环境的热匹配和防尘。仿真分析和样机试验结果验证了关节设计方案可满足月表采样的月面特殊环境要求。
采样机械臂;关节;月球探测;月表环境;环境适应性
0 引言
深空探测活动一般可分为载人探测和无人探测。目前,人类开展的绝大部分深空探测任务都是无人探测。无人深空探测技术风险较小,能够在非常恶劣的深空环境中开展长期探测[1]。无人探测任务中常用到机械臂,如美国“凤凰号”探测器、“好奇号”火星车以及我国的“玉兔号”月球车均采用机械臂实施有效载荷转移、表面采样和就位分析等任务。
关节是实现机械臂灵活运动、精确定位的重要部件。当前工业机器人关节正朝向模块化发展,集驱动器、传动机构、位置传感器、力传感器和温度传感器等于一体,通用性强、研发成本低、便于维护[2],但不适用于对轻量化要求高的定制航天产品。空间机械臂关节通常采用“无刷直流电机+制动器”的传动和制动形式,不同类型关节间的区别主要是传动装置的不同。传动装置主要有行星齿轮和谐波齿轮2种。行星齿轮传动关节的承载能力大,可靠性高,寿命长,但要达到较高的传动比需要采用多级或复合传动,将增加结构的体积、重量和复杂性。因此,行星齿轮较适用于长寿命周期的大型空间机械臂关节。如美国航天飞机上的加拿大机械臂(SRMS)的关节传动装置[3],由两级直齿轮传动组成的高速级和两级行星齿轮传动组成的低速级构成。国际空间站上的加拿大机械臂(SSRMS)也采用了SRMS的传动形式[4-5]。欧洲机械臂(ERΑ)为四级行星齿轮减速[6]。谐波齿轮传动关节的单级传动比大,重量轻,结构紧凑,间隙小,但其扭转刚度存在显著的滞回特性,在热真空环境中易因润滑条件变差使轮齿产生局部过应力,导致柔轮疲劳损坏。因此,谐波齿轮适用于低载荷的轻型空间机械臂关节,如国际空间站上的灵巧机械臂(SPDM)、日本实验舱遥操作机械臂(JEMEMS)[4],以及美国“机遇号”火星车上的仪器展开设备[7]等。这些轻型关节均采用了直流无刷电机驱动谐波齿轮减速器的形式。
空间机械臂和星球探测机械臂对环境要求有所不同。空间机械臂使用环境温度较为适宜,一般在-45~80 ℃范围内,且无须防尘保护[8]。火星车机械臂可承受的环境温度最为恶劣的是“好奇号”火星车机械臂,工作环境温度范围为-110~50 ℃,由于采用了热控多层防护,不需要考虑关节的防尘[9]。目前具备制动功能的关节均采用电磁制动器,如“机遇号”火星车机械臂关节,将制动器布置在电机轴端,增加了关节的整体长度,不利于轻量化设计。
对月球表面采样任务而言,由于月球表面有(1/6)g的重力加速度,所以月球采样机械臂与空间机械臂不同,需克服自身重力,故机械臂关节应尽量遵循轻量化设计原则。为满足月球表面采样任务对机械臂关节防尘、耐高低温(-100~160 ℃)特殊环境以及轻量化的要求,本文提出一种由永磁同步电机驱动、2K-H行星减速器+谐波减速器传动的关节设计方案,采用电机齿槽力矩提供制动力矩,可节省制动器配置,并通过齿轮优化分析、材料热匹配性能分析和试验对方案进行验证。
1 关节功能和性能需求
月表采样任务由探测器搭载的机械臂着陆在月球表面实施,如图1所示。机械臂展开,将末端采样器移动到月球表面,完成月壤样本采集后,机械臂再将装有月壤样本的采样器转移到封装装置中进行封装,最后返回地球。

图1 月表采样示意Fig. 1 Sketch map of lunar surface sampling
月表采样机械臂采用四自由度设计,如图2所示,包括两级臂杆(臂杆Α和臂杆B)、4个关节、采样器及相机等,其中4个关节皆为回转关节。
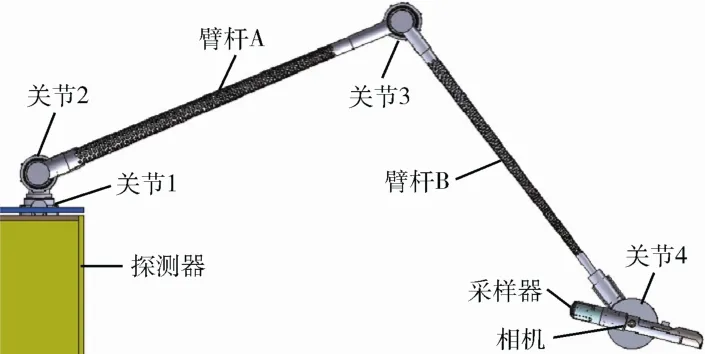
图2 月表采样机械臂组成Fig. 2 Composition of the mechanical arm for lunar surface sampling
本文针对肩偏航关节(关节1)开展设计研究,该关节位于机械臂根部,加之月球表面存在(1/6)g重力加速度,因此在采样过程中,将承受较大的弯矩和扭矩;与其他关节相比,关节1距离末端采样器最远。所有关节的定位精度直接影响末端采样器的定位精度。综合考虑机械臂的采样任务和月球表面环境,肩偏航关节的主要指标如表1所示。
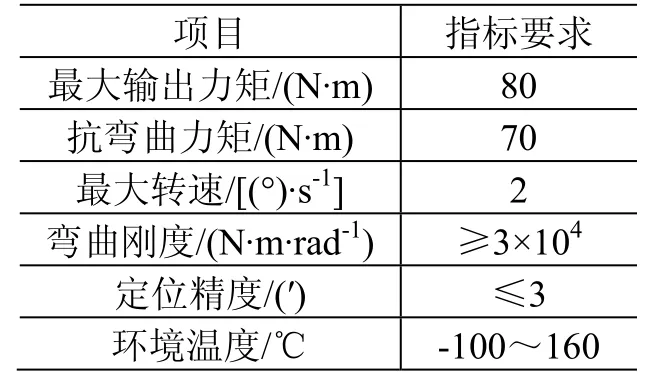
表1 肩偏航关节主要指标Table 1 Main indicators of the shoulder joint
2 轻量化方案设计
2.1 布局及组成
关节布局及组成如图3所示,主要由单通道旋转变压器(旋变)、永磁同步电机、行星减速器、谐波减速器及双通道旋变组成。其中永磁同步电机输出经“行星+谐波”减速后速度减小、力矩放大;单通道旋变精度较低,布置在电机尾部用于测量电机转角和转速,以实现 SVPWM 控制(空间矢量控制);双通道旋变精度较高,可达到 30″,布置在关节输出轴端,精确测量关节转角,用于实现输出轴的位置闭环控制。

图3 关节布局及组成Fig. 3 Joint layout and configuration
2.2 传动方案
1)传动设计方案
如图4所示,减速器传动主要包括两级2K-H行星减速器和谐波减速器,电机从行星减速器输入端输入,由谐波减速器输出端转化成关节输出。谐波减速器为60型,最大输出力矩可达100 N·m。
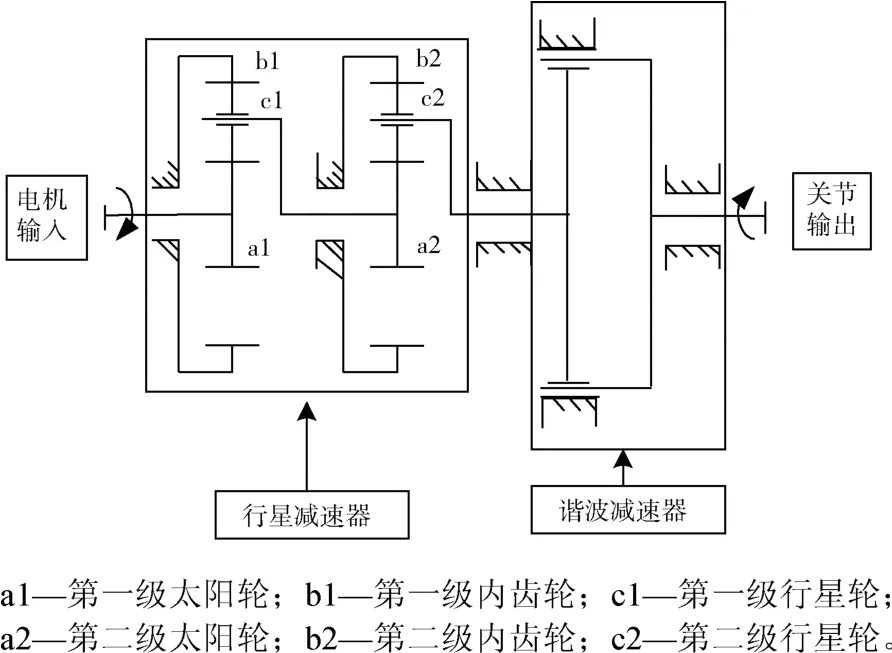
图4 减速器传动方案Fig. 4 Reducer transmission scheme
2)行星减速器主要参数
行星减速器主要参数如表 2所示,其中每级2K-H减速器均布置3组行星轮。

表2 行星减速器主要参数Table 2 Key parameters of the planetary gear reducer
3)总传动比计算
该传动方案的总传动比i等于行星轮传动比i1与谐波传动比i2的乘积,计算如下:

因此,由选用的谐波减速器传动比为160,可计算得到传动方案总传动比为3 146.8。
2.3 电机及制动方案
机械臂关节常用的制动方案是在电机尾部增加电磁式制动器,如美国“勇气号”和“机遇号”火星车搭载的机械臂关节均采用电磁制动器[6]。为节省制动器重量,本文机械臂关节采用永磁同步电机,利用电机本身的齿槽转矩作为整个关节的制动力矩。
电机主、备绕组间隔均布,均采用集中绕组绕线方式,如图5所示。主绕组和备绕组的Α、B、C三相绕组皆由3个齿上的线圈串联而成,并形成空间对称布局,此设计不会造成径向偏心拉力。

图5 电机绕组分布示意Fig. 5 Distribution of the motor windings
绕组展开如图 6所示, Α1、B1、C1代表主绕组,出线端连接电缆引出线,用于电机控制驱动,末端采用星形方式短接;Α2、B2、C2代表备绕组,接线方式同主绕组一致。

图6 电机绕组展开示意Fig. 6 Outspread of the motor windings
电机定子槽数为18槽,转子极对数为6,共有12极。在1个转动周期内,可产生36个齿槽转矩点。齿槽转矩是齿槽永磁电机所固有的,它是在电枢绕组不通电的状态下,由永磁体产生的磁场同电枢铁心的齿槽作用在圆周方向形成的转矩。它来自于永磁体与电枢齿之间的切向力,该力使永磁电机的转子有沿着某一特定方向与定子对齐的趋势,此趋势试图将转子定位在 36个转矩点的某个邻近位置,当电机连续转动时实际会产生一种振荡转矩。常规应用中,均将该转矩作为一项不利因素加以抑制,而本文的关节设计中则利用该齿槽转矩作为制动力矩,力矩幅值为电机额定输出力矩的40%。在关节控制过程中,可根据电机端的旋转变压器测试转角值补偿该齿槽转矩,消除齿槽转矩带来的速度波动,补偿原理如图 7所示。电机额定力矩为0.05 N·m,转速为1000 r/min,满足关节输出需求。
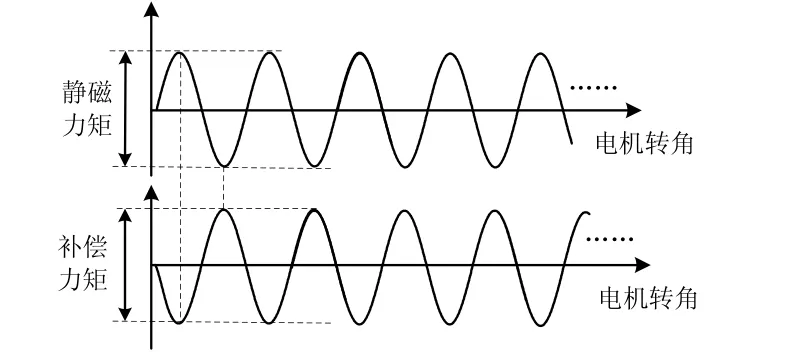
图7 齿槽转矩补偿原理Fig. 7 Principle of magnetostatic torque compensation
3 月面环境适应性分析与设计
3.1 月尘环境分析与防护设计
1)月尘环境
月壤是由月球岩石碎屑、粉末、角砾、撞击熔融玻璃物质组成的、结构松散的混合物。整个月球表面被月壤所覆盖。根据 NΑSΑ科学家对 Αpollo月壤样品的分类定义,月尘是月壤中颗粒粒径小于l mm的部分,其总质量占比在90%以上。根据筛分法可得到月尘所能通过的筛孔直径与月尘粒径分布之间的关系,大部分月尘的粒径分布在 10~1000 µm 之间[10]。
根据对月壤的研究发现,地球强烈火山活动带附近的新鲜火山沉淀物与月壤十分类似[11]。为此采用玄武质火山渣和玄武岩制备了模拟月尘,作为月尘防护设计和试验的对象,其颗粒分布如表3所示。

表3 模拟月尘粒径分布表Table 3 Quality percentage of different size of lunar dust particles
2)月尘的防护设计
机械臂关节的输出端只有旋转变压器处存在相对转动缝隙,其他环节均为密闭设计,为此在关节的旋转变压器定子、转子端盖处采用动密封方式,在缝隙处增加贴合紧密的密封垫片,保证具有对小于10 µm颗粒的防护能力,如图8所示。

图8 防尘设计方案Fig. 8 Dust proof design
密封垫片选用具有自润滑特性的聚四氟乙烯材料,同时该材料基体采用MoS2润滑材料改性工艺,以减小摩擦系数且有效防止空间颗粒进入。该密封垫片的厚度在1~2 mm范围内,高温引起的膨胀变化量在0.04 mm以内,可增加密封性能,然而引起的阻力矩较小,不会导致转轴卡滞。其阻力矩Tm的计算如下:
式中:F为密封垫片的正压力;δ为密封材料的摩擦系数,δ=0.1;r为密封圈的半径,r=26.5 mm;P为密封材料的拉断力;η1为密封材料高温引起的压缩率,即压缩量(0.04 mm)与厚度(2 mm)的比值,η1=2%;η0为密封材料的断裂伸长率,η0=150%;σ为密封材料抗拉强度,σ=15.2 MPa。由此,可计算得的阻力矩Tm=2.37 N·m,而关节的额定输出力矩为80 N·m,远大于阻力矩。
另外关节的输出端转动速度较低(≤2 (°)/s),运转过程中不会引起密封垫片的不稳定;摩擦产生的微小颗粒为聚四氟乙烯和MoS2,具有较好的润滑特性,可对轴承起到润滑作用。
3.2 与月面热环境匹配性设计与分析
3.2.1 与月面热环境匹配性设计
关节的热匹配特性主要与选用的材料有关,因为不同材料的热膨胀系数不同,关节选用材料如表4所示。电机为主要发热源,为保证其在月球表面真空环境具有较好的散热特性,电机壳体选用铝合金,有利于电机定子热量传导到壳体,并通过具有较高发射率的壳体向空间散热;齿轮、轴承为不锈钢材料;其他非发热源的壳体、输出轴等结构件均选用与不锈钢膨胀系数较接近的钛合金。
表4 关节选用材料的物理特性Table 4 Physical properties of the joint’s materials
3.2.2 与月面热环境匹配特性分析
1)钛合金保持架与不锈钢齿轮
由于机械臂需要在月昼最高 160 ℃的环境温度下工作,铝合金和不锈钢材质零件均会产生一定量的膨胀,但钛合金保持架的热膨胀量较小,可能导致行星轮与内齿轮的侧隙增大,太阳轮与行星轮的侧隙变小。这可能会引起传动卡滞,因此控制侧隙变化是关键。行星架与齿轮热匹配分析模型见图9,圆周侧隙变化量由式(6)计算,

式中:∆T为工作温差,取值135 ℃;γ和γ'分别为行星架和齿轮材料的膨胀系数,取值见表4;D为行星架直径25.5 mm;d1为太阳轮分度圆直径11.5 mm;d2为行星轮分度圆直径14 mm。
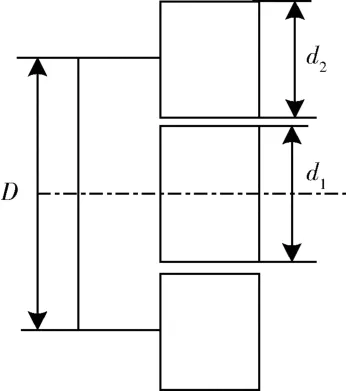
图9 行星架与齿轮热匹配分析模型Fig. 9 Αn analysis model of thermal matching between the planetary carrier and the gear
计算结果∆Jw=0.003 mm,而考虑齿轮加工误差后的最小圆周侧隙为0.04 mm。该侧隙远大于温差带来的影响,且经过谐波减速器 160的传动比后,其对关节的回差影响极小。因此可以认为钛合金保持架与不锈钢齿轮的月面热环境匹配特性满足在轨工作要求。
2)电机铝合金壳体与定子铁心
考虑电机发热引起的温升,电机最高工作温度为200 ℃,而整个关节的最低存储温度为-100 ℃。为了保证电机在高温下能够良好散热,高温时电机定子组件与壳体间的尺寸配合应为接触良好的无间隙配合;而低温时壳体收缩引起的内应力应小于材料屈服极限。
基于此原则,可确定常温时壳体与定子铁心的加工尺寸范围。铝合金线膨胀系数为2.3×10-5℃-1,硅钢材料为1.14×10-5℃-1,假设200 ℃时壳体与铁心正好是无间隙配合,在常温(25 ℃)下壳体内壁直径为 40 mm;则在高温 200 ℃下,其尺寸为40.161 mm。设定硅钢材料 200 ℃时的外径等于40.161 mm,则在常温(25 ℃)时,其加工尺寸应为40.081 mm,理论过盈量为0.04 mm。
根据以上常温下零件尺寸,考虑实际加工误差,对电机在低温下的应力进行仿真分析,获取其各个点的屈服压力,并评价其低温存储的安全性。分析结果如图10所示,壳体所承受的最大应力为102.4 MPa,定子铁心所承受的最大应力为 156.6 MPa,均小于材料屈服极限。因此,可认为电机铝合金壳体与定子铁心的月面热环境匹配特性满足要求。
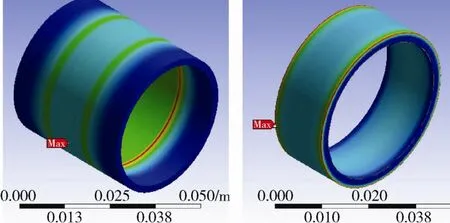
图10 电机壳体与硅钢片的应力分布云图Fig. 10 Stress distribution in motor shell and silicon steel sheet
3.3 针对月面环境下轻量化力矩补偿性能的分析
关节运动精度直接决定了机械臂末端的定位精度,其主要影响因素有:测量误差、控制误差、传动误差和间隙。其中,位置传感器的精度直接决定了测量误差,传动误差可以由闭环控制来补偿,而传动间隙和电机齿槽转矩属于非线性因素,直接影响关节的速度稳定性和定位精度。对于肩偏航关节,传动间隙主要来自于谐波减速器和行星减速器,而行星减速器的间隙经过谐波减速器160的传动比后,影响很小,因此整个关节的间隙影响主要来自于谐波减速器;而电机的齿槽转矩可通过力矩补偿来消除。
假设传动间隙J_t为0,可得出各个节点之间的位置和力矩平衡关系如下:


式中:θin和Tin分别为波发生器输入角度和输入力矩;θn_in和Tn_in分别为波发生器输出角度和输出力矩;θn_fs和Tn_fs分别为柔轮输入角度和输入力矩;θr_fs和Tr_fs分别为柔轮输出角度和输出力矩;θout和Tout分别为关节输出角度和输出力矩;Tf1为波发生器滚动摩擦阻力矩;Tf2为柔轮/钢轮啮合阻力矩;Tf3为输出轴端滚动摩擦阻力矩;Ts1为输入端阻尼力矩;Ts2为输出端阻尼力矩;N为传动比;Tk为输出端扭转刚度力矩;θn_Jt为柔轮/刚轮角度传递中间变量。
对谐波减速器各物理量进行分析[12],建立总体模型如图11所示。

图11 谐波减速器总体模型Fig. 11 Harmonic reducer model
如果存在传动间隙,则当θn_Jt−θn_fs<J_t时,输出力矩Tout=0。
为分析谐波减速器回差对关节定位精度的影响,对一体化关节各物理量之间的相互作用进行综合分析,可表达为图12的形式,以此为依据,应用MΑTLΑB软件建立肩偏航关节的控制模型。

图12 肩偏航关节控制模型Fig. 12 Sholder joint control model
依据建立的 MΑTLΑB模型,给定电机转速28 rad/s,在控制参数一定的情况下,分别对关节未增加力矩补偿和具有力矩补偿这 2种情况进行仿真,结果如图13和图14所示。由图可见,在关节启动时,由于传动间隙等非线性因素的影响,2种情况均具有速度波动。未增加力矩补偿时,由于转动过程中始终存在齿槽转矩的影响,一直存在45 rad/s的速度波动;而增加力矩补偿后,电机会在转动5 s后消除速度波动,表明关节力矩补偿控制可明显降低齿槽转矩的影响。

图13 无力矩补偿时电机速度曲线Fig. 13 Speed curve of motor without torque compensation
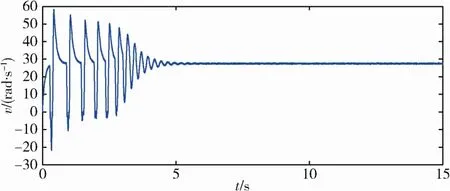
图14 力矩补偿后电机速度曲线Fig. 14 Speed curve of motor after torque compensation
引入位置闭环后的仿真结果如图15所示,首先空载时给定 0.1 rad的角度位置,启动时由于回差的影响,导致输出转角在一定范围内振荡,回差越大振荡幅值越大。随着闭环控制时间的延长,振幅逐渐减小;当角度偏差在要求的±3′偏差范围内持续0.2 s以上时,停止闭环控制,由电机齿槽转矩实现关节制动功能。
关节转动停止后,对输出轴突然加载70 N·m的力矩,此时由于力矩的作用使转角偏差值超出了±3′的范围,控制程序再次进入闭环控制模式。由于回差的存在,输出位置同样会存在短时间一定范围内的振荡,回差越小,振荡幅值越小,振荡时间越短。关节设计时应尽量控制在较小的传动回差。通过以上控制策略,可保证关节控制精度优于±3′。
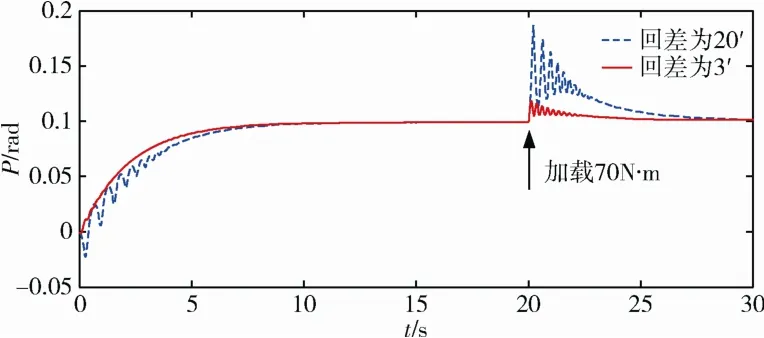
图15 位置闭环曲线Fig. 15 Closed-loop curve of the postion
4 试验测试验证
对设计并制作完成的关节原理样机开展了试验测试验证,包括针对月面热环境条件下的高低温负载能力测试,月面重力环境下的刚度测试、运动精度测试,以及针对月尘环境的防尘测试。
1)月面热环境下高低温负载能力测试
关节放置于高低温循环环境内,如图16所示,采用杠杆原理加载70 N·m弯矩,转轴方向施加动态转矩,结果表明关节在经历-100~160 ℃的存储环境后,在-10~160 ℃的工作环境下可正常输出所要求的80 N·m转矩和2 (°)/s转速。

图16 高低温负载能力测试Fig. 16 High and low temperature load capacity test
2)运动精度测试
关节运动过程中采用激光跟踪仪测试输出轴位置闭环时的转动角度,并与设定角度值进行比较,结果显示关节输出的最大误差为2.8′,符合指标要求。
3)针对月尘环境的防尘测试
将关节原理样机放置于月尘模拟箱内进行防尘测试,模拟月尘的最小粒径小于 10 µm。测试过程结束后关节外表面完全被模拟月尘覆盖(如图 17所示),但测试前后关节均运转正常,且开盖检查未发现模拟月尘进入关节内部,表明本关节防尘方案设计合理、有效。
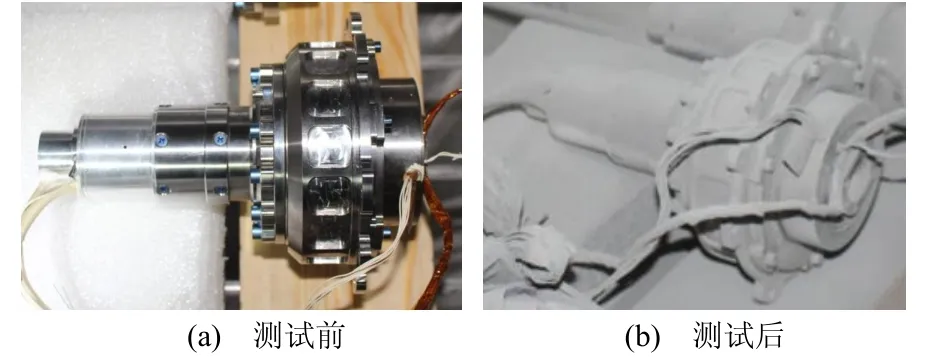
图17 防尘测试Fig. 17 Dust proof test
5 结束语
本文提出一种永磁同步电机驱动、2K-H行星减速器+谐波减速器传动的关节设计方案,采用电机齿槽转矩经大减速比放大的原理提供制动力矩,其中齿槽转矩带来的速度波动由前馈力矩补偿控制消除。针对月表的高低温环境要求,设计分析了关节不同材料的热匹配性能,以保证电机壳体导热充分和减速器传动的侧隙要求。为适应月尘环境,设计了一种由自润滑材料聚四氟乙烯垫片实现动密封的方案。该方案占用空间小,仅在原空间基础上增加2 mm厚度的轴向尺寸,适用于具有2 (°)/s输出速度的低速转动关节。
仿真分析和试验验证表明该方案设计合理,并可省去制动器的配置,有利于关节的轻量化设计。可满足-100~160 ℃的存储环境和-10~160 ℃的工作环境要求,输出80 N·m转矩和2 (°)/s转速,可防护的模拟月壤粒径小于10 µm。
(
)
[1] 叶培建, 邓湘金, 彭兢. 国外深空探测态势特点与启示[J]. 航天器环境工程, 2008, 25(5): 403-405 YE P J, DENG X J, PENG J. Features of deep space exploration in other countries and the enlightenment for the development in China[J]. Spacecraft Environment Engineering, 2008, 25(5): 403-405
[2] 李国涛. 轻型机械臂模块化柔顺关节研究[D]. 哈尔滨:哈尔滨工业大学, 2015: 2-9
[3] CHRISTIΑN S. Canadian space robotic activities[J].Αcta Αstronautica, 2004, (2): 239-246
[4] GIBBS G, SΑCHDEV S. Canada and the International Space Station program: overview and status[J]. Αcta Αstronautica, 2002, 51(1): 591-600
[5] LΑRYSSΑ P, LINDSΑY E. International Space Station robotics: a comparative study of ERΑ, JEMRMS and MSS[C]//7thESΑ Workshop on Αdvanced Space Technologies for Robotics and Αutomation 'ΑSTRΑ 2002' ESTEC. Noordwijk, The Netherlands, 2002: 19-21
[6] BOUMΑNS R, HEEMSKERK C. The European Robotic Αrm for the International Space Station[J]. Robotics and Αutonomous Systems, 1998, 23(1/2): 17-27
[7] RICHΑRD F. Concurrent actuator development for the Mars exploration rover instrument deployment device[C]//10thEuropean Space Mechanisms &Tribology Symposium. Sebastian, Spain, 2003: 255-262
[8] 石进峰. 空间机械臂热控制关键技术研究[D]. 长春:中国科学院长春光学精密机械与物理研究所, 2014:1-20
[9] BILLING R, FLEISCHNER R. Mars science laboratory robotic arm[C]//14thEuropean Space Mechanisms &Tribology Symposium. Constance, Germany, 2011:363-370
[10] WILLMΑN B M, BOLES W W, MCKΑY D S.Properties of lunar soil stimulant JSC-1[J]. Journal of Αerospace Engineering, 1994, 8(2): 77-87
[11] HOUSTON W N, NΑMIQ L I. Penetration resistance of lunar soils[J]. Journal of Terramechancis, 1971, 8(1): 59-69
[12] 韩邦成, 马纪军, 李海涛. 谐波减速器的非线性摩擦建模及补偿[J]. 光学精密工程, 2011,19(5): 1096-1103 HΑN B C, MΑ J J, LI H T. Modeling and compensation of nonlinear friction in harmonic driver[J]. Optics and Precision Engineering, 2011, 19(5): 1096-1103
Environmental adaptive design of joint for a lunar surface sampling arm
WΑNG Kang, ZHΑNG Pei, LIN Yuncheng, LI Delun
(Beijing Key Laboratory of Intelligent Space Robotic Systems Technology and Αpplications,Beijing Institute of Spacecraft System Engineering, Beijing 1000094, China)
The sampling robotic arm is one of the important tools to realize the lunar surface sampling, and the joints are the basis of the flexible movement and the precise positioning of the arm. In order to meet the special requirements of the lunar surface sampling task for the dustproof, the high temperature resistance and the light weight of the joint, a joint design scheme of the 2K-H planetary reducer plus the harmonic reducer driven by the permanent magnet synchronous motor is proposed. In the scheme, the magnetostatic torque of the motor provides the joint braking torque, and the feedforward torque compensation control method is used to eliminate the speed fluctuation caused by the magnetostatic torque and save the brake configuration. By controlling the gearbox transmission backlash, the motor stator shell interference and the gasket thickness, the thermal matching of the joint in the temperature range of -100~160 ℃ and the dustproof goal are achieved. The simulation analysis and the prototype test verify that the joint design can meet the task requirements for the lunar sampling.
sampling arm; joint; luar exploration; lunar surface environment; environmental adaptibility
V414.9
A
1673-1379(2017)05-0482-08
10.3969/j.issn.1673-1379.2017.05.005
2017-04-19;
2017-09-02
国家重大科技专项工程
王康, 张沛, 林云成, 等. 采样机械臂关节月表环境适应性设计[J]. 航天器环境工程, 2017, 34(5): 482-489
WANG K, ZHANG P, LIN Y C, et al. Environmetal adaptive design of joint for a lunar surface sampling arm[J]. Spacecraft Environment Engineering, 2017, 34(5): 482-489
(编辑:张艳艳)
王 康(1985—),男,硕士学位,主要从事空间机构设计工作。E-mail: 68wangkang@163.com。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年13期)2022-07-19
锻压装备与制造技术(2022年3期)2022-07-18
防爆电机(2022年2期)2022-04-26
日用电器(2021年6期)2021-07-19
微电机(2019年4期)2019-05-27
微特电机(2019年1期)2019-02-25
军事文摘(2018年24期)2018-12-26
现代商贸工业(2016年35期)2016-04-09
