磁悬浮陀螺全站仪矿井定向精度分析及应用研究
2017-11-13 07:01周建东岳军红
中国锰业 2017年5期
王 涛,周建东,岳军红
(1. 陕西铁路工程职业技术学院,陕西 渭南 714099; 2. 中铁一局第五工程有限公司,陕西 宝鸡 721006)
磁悬浮陀螺全站仪矿井定向精度分析及应用研究
王 涛1,周建东2,岳军红1
(1. 陕西铁路工程职业技术学院,陕西 渭南 714099; 2. 中铁一局第五工程有限公司,陕西 宝鸡 721006)
分析了磁悬浮陀螺全站仪的测量原理和定向精度,以中煤平朔安家岭2号井工矿为例,给出了GAT磁悬浮陀螺全站仪在煤矿开采贯通测量中的应用,以及贯通测量实测数据处理的理论与方法。结果表明:用加测陀螺边的方法对精密导线进行检核,顺利指导了的矿井巷道的掘进和煤矿生产安全。
磁悬浮陀螺全站仪;煤矿巷道;陀螺定向;仪器常数;贯通测量
0 前 言
矿井地下巷道方位定向测量工作至关重要,其成果质量,直接影响到整个矿井的建设、生产和经济效益[1-3]。唯有选择精度合理的贯通测量仪器和采用有效的方位定向方法,才能保证巷道贯通工作面按设计要求彼此接合。
传统的测量方法是采用精密导线指导矿井巷道贯通,该方法的缺点是随着导线的延伸,测量误差累积影响地下矿井巷道贯通精度[4]。从矿山测量的要求来看,高精度、实时性和先进的测量仪器和数据分析方法是矿山开采中取得灾害预防治理效果的关键[5]。随着陀螺全站仪(或陀螺经纬仪)的出现,加测陀螺边成为检核地下导线精度的有效方法,采用该方法有助于及时改善地下导线的监测精度和提高导线测量成果的可靠性[6-7]。为提高矿井巷道贯通精度,文中以安家岭2号井工矿为例,对GAT磁悬浮陀螺全站仪的测量原理和测量精度进行了分析,并应用该仪器进行了井下方位定向,监测成果成功指导了煤矿巷道顺利贯通。
1 工程概况
安家岭2号井工矿位于宁武煤田北端,行政隶属山西省朔州市,矿区东西宽3 893~5 632 m,南北长1 300~6 197 m,面积约20.20 km2。
为检核矿井精密导线控制网监测精度,以确保矿井巷道精密贯通。文中采用加测陀螺边的方法,运用陀螺全站仪进行陀螺定向观测和平差处理,对安家岭2号井工矿精密导线进行检核,确保了井下巷道方位的正确定向。实例分析表明,将陀螺全站仪在适当位置加测陀螺边的方法应用于井下导线测量中极大地提高了导线的精度和可靠性。
2 陀螺全站仪测量原理及精度分析
2.1磁悬浮陀螺全站仪测量原理
GAT磁悬浮陀螺全站仪由中国航天科技集团第16研究所和长安大学联合攻关研制。该仪器采用磁悬浮技术替代了传统悬挂带支承技术,通过力矩传感器和陀螺转子间的相互作用,测量两个精寻度盘采集的4万组电流值计算测线的真北方位角[8]。仪器获取的原始观测数据如图1所示。磁悬浮技术的采用,有效降低了陀螺灵敏部与外界的接触,提高了仪器的寻北定向精度和使用寿命。GAT磁悬浮陀螺全站仪的方位角测量原理及技术优势详见文献[9-10],在此不再赘述。
2.2贯通测量精度分析
陀螺全站仪的贯通测量精度主要以陀螺方位角一次测定中误差mT和一次定向中误差mα表示。外业测量工作完成后,首先根据洞外测量数据计算仪器常数Ki及其精度。有关陀螺全站仪仪器常数的影响因素及测定方法文献中有详细描述[11]。在此设测前与测后洞外测量测回数相同,都为n测回。
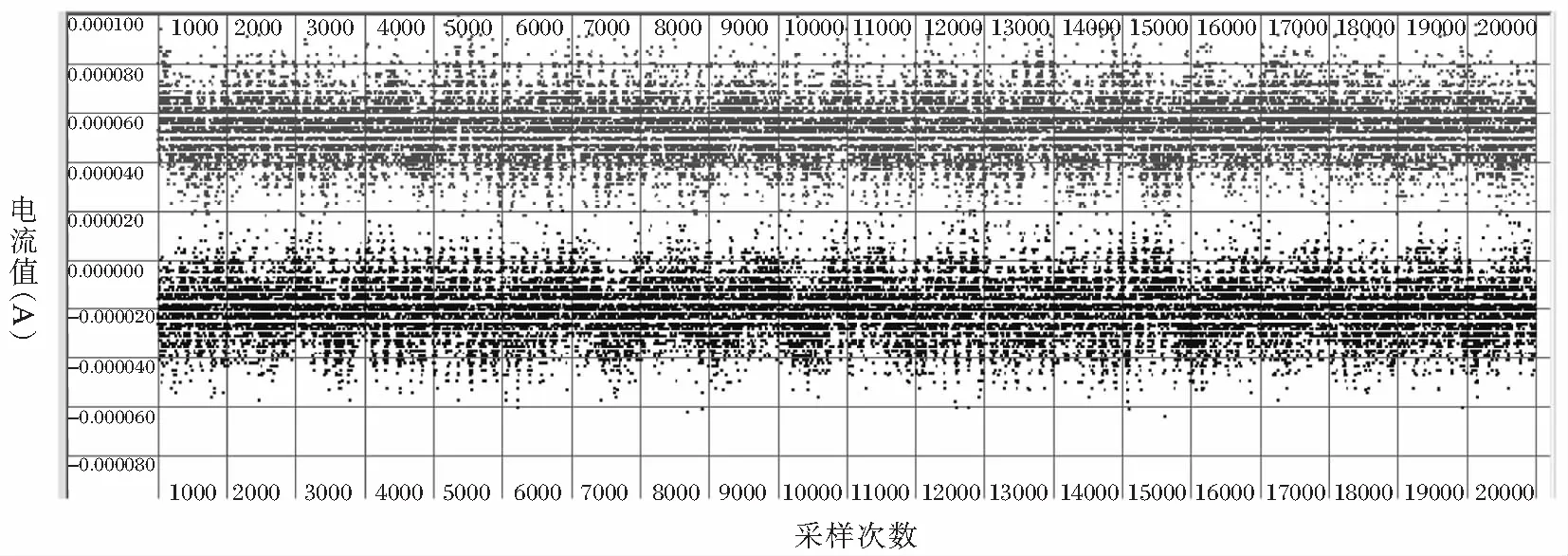
图1 部分采样数据散点图
设洞外测量基线为AB,αAB为其坐标方位角,γA为基线起点A的子午线收敛角,每测回角度测量值与陀螺方位角测量值分别为Li与Ti(i=1,2,…,2n),则
Ki=αAB-(Li+Ti+γA)
(1)
仪器常数K通过计算式(1)的平均值得到。
仪器常数K测量精度的计算方法与角度以及陀螺方位角计算相同,即

(2)
式(2)中σK表示仪器常数测量精度
Vi=Ki-K(i=1,2,…,2n)。
仪器常数测量精度满足要求后,进行测量基线坐标方位角计算,计算公式如下:
(3)

根据测量误差传播律,坐标方位角测量中误差为
(4)

由大地坐标(L,B)计算子午线收敛角γ的公式为:

(5)
式中:t=tanB,η=e′·cos2B(e′为第二偏心率),B为纬度,l为经差。
根据公式(4),可以估算每条基线边坐标方位角测量精度。若全站仪一测回水平角测量精度为±2″,陀螺仪方位角测量一测回精度为±5″,每个测站全站仪与陀螺仪都观测3测回。则仪器常数测量精度为:

(6)
洞内测量基线坐标方位角测量精度为:
(7)
3 煤矿巷道贯通测量
3.1贯通测量方案
陀螺全站仪(或陀螺经纬仪)定向作业过程在《工程测量学》教材中有详细描述。此次陀螺定向测量过程严格执行《煤矿测量规程》(第62条)规定,采用“3+2+3”的测量模式进行,即在井上地面已知边上进行3测回测量陀螺方位角,并求得仪器常数K1;在井下定向边上测量2测回陀螺方位角;返回地面(井上)已知边后,再在原已知边上测量3测回陀螺方位角,求得仪器常数K2;最终仪器常数取K=(K1+K2)/2。
3.2巷道方位定向测量过程
3.2.1 仪器常数标定
巷道方位定向过程中,选取地面上GG01、GG02两个控制点连接而成的测线进行仪器常数标定。在下井前由于GG01点风振影响较为严重,因此,在测量了3个测回后又将仪器架设在GG02点进行对向观测,此时,风振影响逐渐减小,部分数据中虽有小幅度的波动,但通过粗差剔除、滤波等方法可以对定向成果进行优化。上井后由于观测条件较好(风振等不良因素影响较小),在GG01点又对仪器常数进行了4个测回的观测,最后通过数据滤波、粗差剔除等方法确定使用6个测回计算仪器常数。前后分别独立进行3个测回的仪器常数测量。
若某加测陀螺边的坐标方位角是α,测站点子午线收敛角为γ,则该定向边的真北方位角可由公式A=α+γ求得。根据A=α+γ求得地面已知边GG01-GG02的正反真北方位角AGG01→GG02=258(°)19(′)04(″),AGG02→GG01=78(°)19(′)01(″)。再根据A=T+K(其中T为测线的陀螺全站仪定向值;K为仪器常数),结合地面定向(洞外测量)成果,计算可得仪器常数值。
仪器常数测量成果见表1所示。表1中V表示真误差,VV表示真误差的平方,观测数据文件号是原始采集数据的一个编号,无量纲。由表1的洞外测量观测数据,可计算得出该仪器常数一次测定中误差为:
(8)
仪器常数最或是值的中误差:

(9)

表1 井上(洞外)仪器常数测量成果

表2 煤矿巷道待测边陀螺定向测量结果比对
3.2.2 加测陀螺边位置确定
在井下导线边中每隔3 km左右选择FYH1→FYH2、FYC2→FYC3、H→Z2 3条边加测陀螺边,每条边上测量陀螺方位角各2个测回,最终方位定向成果见表2所示。
4 结 语
通过安家岭2号井工矿地下巷道方位定向测量分析得出:
1)本次陀螺定向测量选取了洞外测线GG01→GG02进行仪器常数的标定;为了保证测量成果的可靠性,在该测线上进行了对向观测,进行检核;结果证明,此次陀螺定向测量的一次测定中误差为3.1("),定向成果精度较高。
2)由于陀螺全站仪方位定向成果无误差累积,且可直接测得真北方向,因此建议参考此次陀螺定向成果,对洞内导线进行适当调整,提高洞内导线测量精度,限制误差累积。
[1] 李国宝.陀螺仪在独立坐标系地下矿山快速定向的研究应用[J].城市地理,2015(22): 14-15.
[2] 徐广翔,牛福龙.特大型矿井贯通测量关键技术分析[J].煤炭科学技术,2011, 39(12): 116-119.
[3] 梁振华.贯通测量误差的预计及在测量中应注意的问题[J].煤炭技术,2013, 32(4): 128-129.
[4] 梁臣艺,张载标,张民英.全站仪在导线测量中的应用[J].中国锰业,2015, 33(2): 52-55.
[5] 刘海玲,邱玉霞.刍议现代测绘技术在有色金属矿山地质灾害中的应用[J].中国锰业,2017, 35(1): 182-184.
[6] 王爱生,魏猛.基于约束平差的陀螺导线精度预计[J].工程勘察, 2013(1):54-57.
[7] 李保学.陀螺方位附合导线在矿井测量中的应用[J].煤炭技术,2015, 34(2): 73-74.
[8] 赵丕.GAT磁悬浮陀螺全站仪数据分析与处理[D].西安:长安大学,2012.
[9] 刘思伟,白云超,田育民,等.一种磁悬浮陀螺寻北仪的研究[J]. 测绘技术装备,2008, 10(3): 43-45.
[10] 王涛,杨志强,石震,等.新型陀螺全站仪方位定向误差分析及工程应用[J]. 煤炭科学技术,2014, 42(11): 90-92.
[11] 蒋庆仙,陈晓璧,马小辉.陀螺经纬仪的仪器常数及其测定[J].测绘科学,2008, 33(2): 152-154.
AStudyofMaglevGyroTotalStation'DirectionalPrecisionandEngineeringApplicationinMineTunnel
WANG Tao1, ZHOU Jiandong2, YUE Junhong1
(1.ShanxiRailwayEngineeringVocationalandTechnicalInstitute,Weinan,Henan714099,China; 2.TheFifthEngineeringCo.Ltd.ofChinaRailwayFirstEngineeringGroup,Baoji,Shanxi721006,China)
The paper analyzes the measuring principle and accuracy of magnetic suspension gyro total station. Taking mine tunnel No.2 of An Jia-ling precision through-survey as an example, authors give a thorough measuring scheme and the measured data in processing theory for the applications of mine roadway. The results show that the method has guided roadway drivage and coal mine production safety.
Magnetic suspension gyro station;Mine tunnel;Gyro-orientation;Instrumental constant; Through-survey
2017-05-30
陕西省教育厅自然科学基金资助项目(14JK1167);2016年渭南市科技项目计划(2016KYJ-1-1)。
王涛(1979-),男,陕西西安人,副教授(博士),研究方向:高精度陀螺全站仪研制及其数据处理,地质灾害监测与防治等,手机:15029536410,E-mail:survey-tao@sohu.com.
TD172.2
A
10.14101/j.cnki.issn.1002-4336.2017.05.046
猜你喜欢
结构工程师(2022年2期)2022-07-15
新型工业化(2022年5期)2022-06-17
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
军事文摘(2017年16期)2018-01-19
中国科技教育(2016年12期)2017-08-11