
雾霾天气下车前障碍物识别
2017-11-17 07:22贵州师范大学物理与电子科学学院刘志超张良玉
电子世界 2017年21期
贵州师范大学物理与电子科学学院 李 浩 刘志超 杨 梅 张良玉
雾霾天气下车前障碍物识别
贵州师范大学物理与电子科学学院 李 浩 刘志超 杨 梅 张良玉
针对雾霾环境下驾驶员对前方环境辨别能力差、处理图像时干扰因素过多等问题,提出了一种基于引导图像滤波和Prewitt算子相结合的方法.本方法通过含有包滤波器的引导图像滤波去除雾霾影响,然后借助霍夫(Hough)变换对道路边缘进行检测以寻找到感兴趣区域(Regions of Interest,ROI),最后对这一区域的图像使用Prewitt算子的边缘检测进行处理以识别出车辆前方的障碍物.该方法不仅能有效避免驾驶员因视线差而导致的事故,而且提高了障碍物的识别效果.
雾霾;引导图像滤波;霍夫变换;障碍物;Prewitt算子
0 引言
雾霾是由于空气中二氧化硫(SO2)、氮氧化物以及可吸入颗粒物(PM2.5)达到了一定的程度所形成的,对人类的身体状况以及生活环境造成极大的影响,尤其在交通安全方面.
由于空气质量差,能见度低,雾霾天气很容易发生交通堵塞甚至发生交通事故.因此,在对车辆前方障碍物的识别过程中,如何消除雾霾天气对图像识别的影响就显得尤为重要.
目前对雾霾的处理方法主要有两种方向:一种是对图像进行增强的处理办法,另一种是对图像进行修复[1].而前者主要包括直方图均衡化法、Retinex图像增强算法、小波变换算法等,后者主要包括基于深度信息的图像复原算法、基于暗原色先验理论图像复原算法等.本文所使用的是引导图像滤波的方法.
1 图像去雾霾处理
对图像进行雾霾去除所使用的方法--引导图像滤波,也被称为边缘平滑滤波器.它主要是通过一幅引导图像对输入的图像进行滤波,使得输出的图像一方面可以保留输入图像的特征,另一方面也可以获得引导图像的变化细节[2].设输入图像为p,引导图像为I,输出图像为q,而q与p的关系为:

其中n为图像中的噪声或纹理,将输入的图像去除掉噪声得出所需图像.引导图像滤波过程主要通过公式(2)~(4)实现.

式中ε为正则化参数,cov(I,p)代表I与p之间的协方差,var(I)是求I的方差.(2)式是要求滤波后的图像中的纹理需要和引导图像的纹理相似,(3)和(4)式是表示滤波后的图像尽可能与输出图像相似,这也是满足引导图像滤波的两个条件.
图像中取每个像素的和、平方和、协方差、方差等特征时,需要复杂、繁琐的算法,为了对其优化,本文对图像引导滤波时引入了包滤波器(boxfilter),主要功能:在确定了的滑动窗口下,对每一行、列的像素值相加求和.本文在仿真时所使用的引导图像为原始输入图像,即I=p[3].如图1为引导图像滤波后的图像与输出图像的对比.通过对比图,引导滤波后的图像可以有效地去除图中雾霾的影响,细节增强,对下一步道路图像的处理提高准确性.

图1 引导滤波前后图像
2 道路边界检测
道路边界线主要是为了区分道路与非路面而设定的一条界线.在城市道路建设中,道路边界线的设定也是在给行车的司机一种约束,以防其行驶到非机动车道.一般的道路边界线是两条白色的实线,分别位于道路的两边.为了检测出道路的边界线,本文使用的是Hough变换的方法[4].而由于Hough变换主要思想是从黑白图像中检测直线,因此对图像进行Hough变换时需要先将彩色图像灰度化.在整个过程中,实现Hough变换需要三个步骤[5]:第一,从图像中随机选取前景点,然后将其映射到极坐标系中;第二,在极坐标系中,如果出现有交点并且达到了最小投票数,就把此点对应到x-y坐标中的直线L上;第三,寻找边缘图像中的前景点,把直线L上的点连成线段,然后将这些点删除掉,并记录该线段的数据.在仿真中使用了Hough函数:一个是求极值点:Peaks=houghpeaks(H,1);另一个是为了得到线段的信息:lines=houghlines(Iedge,T,R,Peaks),从而得到了道路边界线,如图2所示.

图2 利用Hough变换检测道路边界线
3 障碍物识别
对图像进行雾霾去除与道路边界线识别后,就可以对车前障碍物识别.本文选取第一张图像进行处理.
3.1 ROI区域确定
图像处理过程中,为了简化处理过程我们需要提取出有用的信息,也就是ROI区域[6].为了更加准确地,实用地得到此区域,只需从道路边界线中选取即可.在道路边界线的仿真中,通过两条代码:
xy=[lines(k).point1;lines(k).point2];
xy1=[lines1(k).point1;lines1(k).point2];
可以得出两条线段直的范围xy=[272,146;458,79]、xy1=[380,208;470,237],然后将两条线段完整的融合出来,如图3所示.从图中可以找出两条线段的焦点(232.1429,160.3571),从而确定出所需ROI区域的范围,即图3所示的阴影部分.
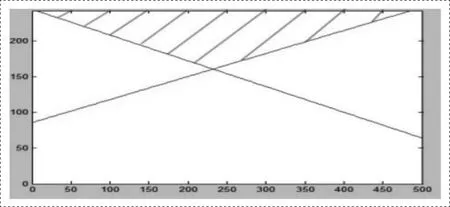
图3 融合道路边缘线
由于汽车在行驶过程中,当遇到紧急情况时会选择刹车,而由于惯性会出现一段刹车距离,所以根据《中华人民共和国道路交通安全法》中的条例并结合阴影的范围,得出了ROI区域的坐标,即x=[0,164,307,501]、y=[242,183,183,242].如图4为所得到的ROI区域.

图4 图像RIO区域
3.2 图像预处理
对目标确认之前,首先对图像进行预处理,以下为预处理过程的流程图.

图5 图像预处理流程图
为了能更准确的检测到前方障碍物,在对处理雾霾后的基础上加入了直方图均匀化与中值滤波,进一步消除图像中的噪声,并且保持了图像中的细节部分[7].在滤波窗口的选择上,本文使用的是3X3的滤波窗口.而为了让图像更加清晰以及特征更加明显,本文在滤波后的基础上加入了灰度变换[8],采用的是imadjust函数.对图像边缘检测中,参照文献[7]与[9]并且借助仿真结果的比较,选用了Prewitt算子.Prewitt算子是一种3X3模板的算子,通过一幅图像中某个像素点的上下、左右的灰度差,并且在检测边缘处时达到极值,如图6所示.借助一条代码:
R_edge=edge (R_imad,'prewitt');
得出边缘检测后的图像,如图7所示.从中可以看出Prewitt算子的边缘检测方法对图像不仅可以检测出边缘点,而且可以抑制噪声的影响.
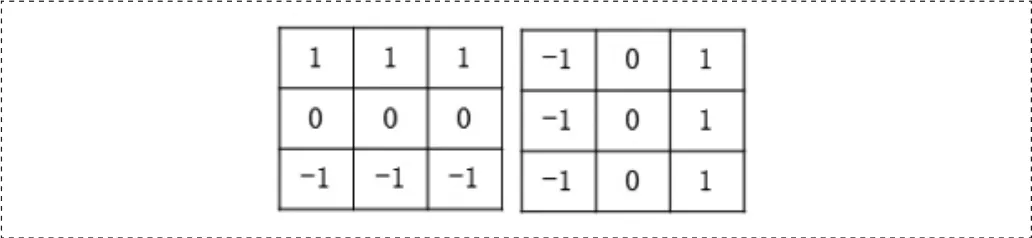
图6 Prewitt算子
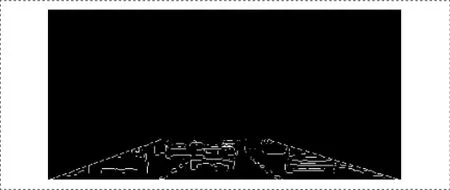
图7 利用Prewitt算子检测图像边缘
3.3 目标区域确定
图像边缘检测后,要对图像进行形态学处理,主要有三个步骤:第一图像腐蚀运算,使用imerode函数;第二图像闭运算,填充图像,使用imclose函数;第三去除聚团灰度值小于300的部分,使用bwareaopen函数.最后将处理过的图像转移到原图像中就得到了目标区域,如图8所示.

图8 目标区域图像
4 总结
针对雾霾环境下,车辆前方障碍物难以识别,提出了一种用于解决该问题的图像多层次处理方法.分别使用了引导图像滤波、Hough变换、中值滤波等算法,进一步提高识别成功率,对以后的障碍物避让方法的研究打下基础.
[1]李滚,吴劼夫,雷志勇.图像雾霾等级评价及去雾技术研究进展[J].激光杂志,2014(09):1-6.
[2]Tsai C L,Tu W C,Chien S Y.Efficient natural color image denoising based on guided filter.IEEE International Conference on Image Processing,2015:43-47.
[3]Liu Y,heng C,Zheng Q.Removing Monte Carlo noise using a Sobel operator and a guided image filter[J].Visual Computer,2017:1-13.
[4]王燕清,辛柯俊,陈德运,等.基于启发式概率Hough变换的道路边缘检测方法[J].计算机科学,2013(09):279-283.
[5]Mukhopadhyay P,Chaudhuri B B.A survey of Hough Transform[J].Pattern Recognition,2014,48(3):993-1010.
[6]许刚,闫欣.图像感兴趣区域多源颜色信息融合算法[J].计算机工程与设计,2016(10):2728-2732.
[7]张岩.MATLAB图像处理超级学习手册[M].北京:人民邮电出版社,2014:186-188.
[8]陈建美,宋余庆,朱峰.数字图像处理与分析[M].江苏:江苏大学出版社,2015:66-68.
[9]Ni S,Mehra R,Sharma L.Comparative Analysis of Canny and Prewitt Edge Detection Techniques used in Image Processing.International Journal of Engineering Trends andTechnology(IJETT),2015:48-53.
Identification of Obstructions in front of Vehicles under Smog
LI Hao,LIU Zhichao,YANG Mei,ZHANG Langyu
(School of Physics and Electronic Science,Guizhou Normal University,Guiyang,Guizhou 550001,China)
For poor discriminating ability of the driver in smog environment and excessive interference factors in image processing,an approach is proposed based on the combination of guided image filtering and Prewitt operator.In this approach,the smog factor is removed by guided image filtering with box filter,and then the road edge is detected by Hough transform to find the region of interest(ROI).At last,the image of the area is processed by edge detection method of the Prewitt operator to identify the obstacles in front of vehicle. This approach not only can effectively avoid the accident caused by driver's sight,but improve the identification of obstacles.
Key worlds:Smog;Guided image filter;Hough transform;Obstacle;Prewitt operator
贵州师范大学研究生创新基金(研创(2016)17).
李浩(1992-),男,硕士研究生,研究方向:智能网络控制与应用.
猜你喜欢
第二课堂(课外活动版)(2022年5期)2022-05-25
数学物理学报(2021年2期)2021-06-09
应用数学(2020年2期)2020-06-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
数学年刊A辑(中文版)(2018年2期)2019-01-08
学生天地·小学中高年级(2018年5期)2018-09-07
学生天地(2018年14期)2018-09-07
智慧少年(2017年8期)2018-01-10
数学物理学报(2016年3期)2016-12-01
