
基于PLC控制的工业机器人系统研究
2018-02-18 01:17李晓鹿
中小企业管理与科技·上旬刊 2018年12期
李晓鹿

【摘 要】论文首先对工业机器人的基本含义进行概述,然后从适应性、可靠性、简单性三个方面入手,对PLC控制技术具备的特性进行解析,并以此为依据,提出基于PLC控制的工业机器人系统应用对策。
【Abstract】This paper firstly summarizes the basic meaning of the industrial robot, and then analyzes the characteristics of the PLC control technology from three aspects of adaptability, reliability and simplicity. And on this basis, it puts forward the application countermeasures of industrial robot system based on the PLC control.
【关键词】PLC控制;工业机器人;控制系统
【Keywords】 PLC control; industrial robot; control system
【中图分类号】TP242 【文献标志码】A 【文章编号】1673-1069(2018)12-0130-02
1 引言
工业机器人作为一项机电一体化的高新技术,在工业领域中得到了全面普及和应用,对提升生产效率,保证生产质量,增加经济效益,改善生产方式等起到了一定的效果。而把PLC控制技术运用到工业机器人系统中,能够引导工业化稳定发展。因此,PLC控制在工业机器人系统中实现了广泛应用,并取得良好的应用效果。下面,本文将进一步阐述和分析基于PLC控制的工业机器人系统。
2 工业机器人的基本概述
近年来,随着我国工业自动化全面发展,PLC控制技术以及工业机器人技术实现了快速发展及创新。在当前科学技术水平不断提升的背景下,工业自动化技术得到了较大进步。基于PLC控制下的工业机器人系统探究,主要是把PLC控制技术当作核心,将其运用到工业机器人中,实现工业生产的自动化和科学化。现阶段,把PLC控制技术当作主体的工业机器人得到了工业领域的广泛应用,同时也取得了理想的应用成果,并成为评估工业自动化发展的核心要素[1]。在工业机器人中应用PLC控制技术,不但能够满足各种工业自动化生产要求,同时还能保证工业生产质量,对引导工业发展起到了促进效果。
3 PLC控制技术具备的特性
3.1 适应性
PLC控制技术具備的主要功能为储存器储存控制,假设将其控制功能进行更改,仅需要对系统相关参数或者接线方式进行更改机构,以此实现控制系统的改变。另外,PLC控制技术不但自身种类繁多,同时能够灵活组合,以满足各个控制系统自身需求。
3.2 可靠性
在进行PLC生产时,生产厂家为了保证PLC控制技术的实用性,一般需要借助一系列干扰对策进行处理,因此,在进行PLC控制技术应用时,自身具备较强的可靠性,并且便于后续工作的落实[2]。
3.3 简单性
因为PLC自身具备编制简单、操作便利等特性,在应用过程中,仅需要借助微机就能实现对显影系统的把控。因此,PLC控制技术也具备PLC自身特性。只要对计算机操作方式有一定了解,便能利用逻辑控制、计数控制、算术控制等方式进行操作,以此达到数字化控制的效果。
4 基于PLC控制的工业机器人系统应用对策
4.1 工业机器人控制硬件设计
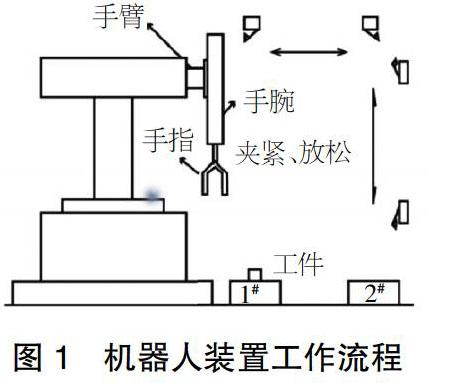
在对工业机器人设计的过程中,重点思考的问题在于机器人应该具备搬运、装配等能力,这就需要把PLC控制技术运用到工业机器人中,利用气缸驱动来实现。而对气缸驱动动作进行把控的设备在于电磁阀部件,借助此部件能够实现对机器人动作的设定。在PLC控制技术的作用下,能够确保工业机器人自身具备电磁阀部件等诸多控制装置,并且保障了各个装置之间能够充分合作和配合,形成一种特殊的控制方法。通常情况下,工业机器人主要由两个工作台构建而成。在进行机器人操作过程中,需要借助加工工件由初始位置传递到1#工作台,在没有经过操作工件的情况下直接传递到2#工作台时,依旧可以从2#工作台传递给1#工作台,之后实现一系列工件操作[3]。
机器人可以根据事前设定的工作流程来落实控制操作工作,要求机器人在初期设定位置逐渐移动,操作手指可以把1#工作台中的产品转移到2#工作台中,以此实现产品的转移。在移动过程中,移动到某一位置之后,工业机器人手指及手腕都会朝着规定方向移动,直到达到事前设定的位置。为了将产品再次移动到1#工作台,可以根据上述流程进行反向操作。机器人装置工作流程见图1。
4.2 机器人软件设计
在进行工业机器人软件设计的过程中,设计依据主要是根据机器人操作流程来实现。机器人作为构建在PLC控制技术基础上形成的产物,利用手动及自动两种方式进行操作。在对其加以设计时,应该对机器人自动控制系统整个工作流程特性进行思考,合理选择流程设计指令,严格按照指令要求来落实。首先,加强对机器人流程的科学管理,机器人装置在充电过程中,可以对其实现初始化设置,这样做的目的在于便于后续工作的实现,防止机器人自动控制系统装置由于直接插入而出现操作失误现象。在进行初始化流程操作指令编制过程中,应该选用ISL初始状态指令,从而保证编制的简便化。其次,对机器人控制系统中手动控制模型进行科学设计。在进行设计时,应该在机器人系统维护及管理环节中进行操作设计,在对手动开关加以设计的同时,还要和手指部件进行连接,适当调节手臂高度,根据设定流程对机器人手臂、手腕、手指等进行移动操作。要想提升系统应用的安全性,还要设定连锁保护流程。最后,在对机器人装置流程有一定认识之后,需要对机器人自动控制系统设计流程进行思考,确保各个动作的连贯性。一般情况下,当机器人处于初始状态,或者在检测过程中,才能执行自动化控制操作。
4.3 科学应用PLC控制技术
首先,在工业机器人操作控制过程中,可以借助PLC控制技术,保证工业机器人操作控制工作的顺利进行。根据当前情况来说,由于工业机器人各轴运作呈现出相对独立状态,通过借助部分机械按钮能够对其进行操作,而通过把PLC控制技术运用到工业机器人中,能够保证操作控制系统的自动化和协调性。并且,因为工业机器人由两点运行,其中包含了直线运行、固定轴旋转运行。而相应的工业机器人在升降手臂来对另一台机器进行操作时,需要借助一台伺服电机来实现垂直运行,此外大臂及小臂的运行方式则是借助两台伺服电机来实现。针对电机选择以及工业机器人参数,我们可以参考表1。
其次,针对运行控制编制,应该根据未知参数加以设定。以升降臂为例,通常情况下,升降臂的运行方向为上下运作,这是借助电机中减速器带动丝杆来实现。其中,减速器的传动比设定为N=1:80,而丝杆螺距设定为T=4mm,在电机运作过程中,通常采用定位控制方式,因此,在转数为n1时,根据MAM指令,升降臂的参数设定公式为:n1==20p2(rps)[4]。
最后,因为工业机器人主要是借助运行质量来进行运行和操作,因此,在应用PLC控制技术的作用下,应该对其移动方向、移动状况等内容进行综合思考。通过把PLC控制技术运用到工业機器人中实现系统控制,需要得到代码的支持。
通常情况下,通过高级语言来进行机器人控制程序的编制,在此过程中,应该将其转变成PLC数控程序。一般涉及控制指令、中间参数、变量参数等,在PLC控制技术的作用下进行核算,并借助参数及指令对工业机器人进行运行控制。
5 结语
总而言之,和传统硬件系统链接方式进行对比,PLC控制技术不管是硬件设计方面,还是在软件设计方面,都具备较强的便捷性,同时还能减少空间应用,确保了机器人在操作中的柔性及扩展性特质。通过把PLC控制技术运用到工业机器人中,不但能够有效提升机器人控制系统的实用性和操作性,对今后工业发展也具有促进作用。
【参考文献】
【1】罗曼.工业机器人开放式控制系统的研究[J].科学大众(科学教育),2018(09):190.
【2】王秀季.PLC控制的工业机器人组装系统研究[J].中国设备工程,
2018(16):145-146.
【3】常春阳,王磊.浅谈PLC控制的工业机器人组装系统[J].内燃机与配件,2017(20):128.
【4】李太胜.基于PLC控制的工业机器人系统的研究与实现[J].中国高新技术企业,2014(15):26-27.
猜你喜欢
科技创新与应用(2016年34期)2016-12-23
科学与财富(2016年18期)2016-12-22
科技创新导报(2016年21期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
