
多波束测深系统校正技术在水深地形测量中的应用
2018-02-26 08:24淳明浩刘振纹毛天宇杨肖迪罗小桥张宁馨
石油工程建设 2018年1期
淳明浩,刘振纹,毛天宇,杨肖迪,罗小桥,张宁馨
中国石油集团工程技术研究有限公司,天津 300451
多波束测深系统也称为条带式测深系统,是利用声波在水体的传播特性来测量水深的一种声学探测技术[1]。该系统利用安装于测量船底部的声学换能器阵列,按照一定的角度向海底发射超宽声波波束,并接收海底反向散射的回波信号[2],根据各角度反射声波到达接收换能器的时间和相位,经过信号解算得到多个探测点的水深值,这是一个主动识别和进行异常校正的测深过程[3],其水深测量值是根据发射声波探测海底的往返时间与声波在海水中的传播速度来确定[4],探测原理见图1[5-6]。多波束测深系统在工作过程中,发生声学换能器姿态的指向、上下高度、左右倾斜度、前后倾斜度等变化,会引起探测波束位置和波束在水体中的传播时间误差,对水深地形测量精度具有直接的影响[7-8],测量误差示意见图2。因此,在海洋工程勘察测绘过程中,需对多波束测深系统进行正确校正并设定正确参数,以获得高质量的测深数据,并最大限度地提高测量精度和效率。

图1 多波束测深系统探测原理

图2 多波束测深系统测量误差示意
本文详细介绍了多波束测深系统在水深地形测量过程中的系统校正方法,为多波束系统外业测量工作提供参考。
1 多波束测深系统校正
多波束测深系统校正作业由多个过程组成,包括声速校正、横摇纵摇校正、艏摇校正、延时校正等。
1.1 声速校正
影响多波束测探数据的因素有很多,其中海水声速(简称“声速”)是影响多波束测深数据一个重要的因素。因此,为测深系统提供当时当地准确的声速值是获取可靠水深测量数据的基本保证之一。此外,多波束测深系统对所输入的声速数据量有一定的限制,不同的声速数据取点,也会对测量结果产生影响。为了获得准确可靠的水深测量数据,必须进行声速改正[9]。声速校正的声速剖面原理见图3。

图3 声速剖面原理示意
如图3所示,在水质均匀的理想情况下,测量的水体声速剖面为零梯度声速剖面(Co-CA);实际工作中,水体多不均匀,不同层位声速性质差异较大,测量所得的水体声速剖面不规则(Co-Cc);经过声速校正后,所得水体声速剖面为规则的等效声速面(Co-CB)。
1.2 横摇纵摇校正
在测量船上安装多波束测深系统设备时和测量作业过程中,很难保证多波束换能器基阵中心的三坐标轴与测量船中心的三坐标轴完全重合,且随船体运动出现横摇、纵摇和艏摇(见图4)。因此,多波束测深系统在正式工作之前,必须正确、严格地进行各项系统参数的校正测定。需要测定的系统参数有:横摇偏角、纵摇偏角和艏摇偏角等[10]。

图4 多波束测深系统横摇纵摇艏摇示意
在平坦的海底,横摇角度误差导致水深误差大,而且随着波束角、纵横摇角度的增大而增加,当波束角θ>30°时,横摇角度误差引起的水深相对误差会超过0.1%[11]。纵摇参数校正时,精度须小于±0.1°;而横摇参数校正时,精度须达到±0.01°[12]。对纵摇、横摇角度偏差参数校正值的获取,主要通过实测法和剖面重合法[13]。实测法即在实际测量中借助地形图中等深线或地物间距离和坡度的计算获得参数的方法[14],横摇、纵摇实测校正示意见图5、图6。
横摇偏差可用下式计算:

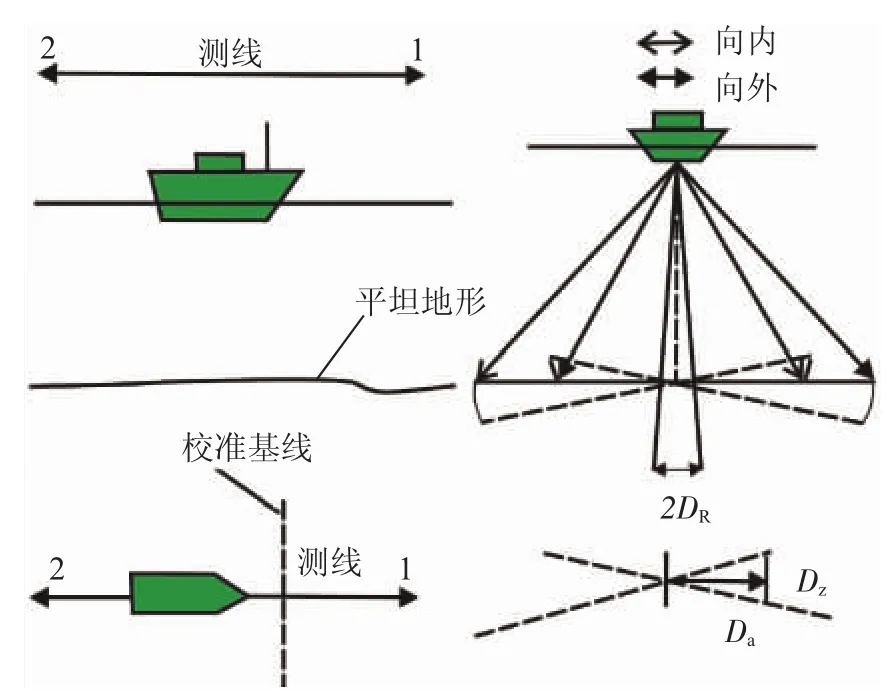
图5 横摇校正示意

图6 纵摇校正示意
式中:DR为横摇偏差,(°);Dz为测线往返方向上测量的水深差,m;Da为垂直航迹方向的距离,m。
纵摇偏差可用下式计算:

式中:Dp为纵摇偏差,(°);Db为两次测量的地形特征沿相反航迹方向偏移量,m;H为测量水深,m。
1.3 艏摇及升沉校正
艏摇偏差使测点位置以中央波束为原点旋转同一角度,造成位移在中央波束处为0,离中央波束越远,位移越大,导致测量数据的错误[15]。艏摇偏差的校正应选择特征地形进行,测量船通过两条平行测线(测线间距应保证边缘波束重叠不小于10%),以相同速度相同方向各测量一次[16]。利用数据采集系统进行校正时,沿航向选择重合部分的波束,通过比较重叠部分的两个剖面确定的最小偏差即为艏摇偏差。如图7所示,海底孤立目标物实际位置在B处,当调查船从左侧测线经过时,目标物探测位置移动到A处,当调查船从右侧测线经过时,目标物探测位置移动到C处,则艏摇偏差可用下式计算:

式中:Y(θ)为艏摇偏差,(°);Dc为目标物位置两次测量相差距离,m;d为调查船移动时与目标物之间的最小距离,m。
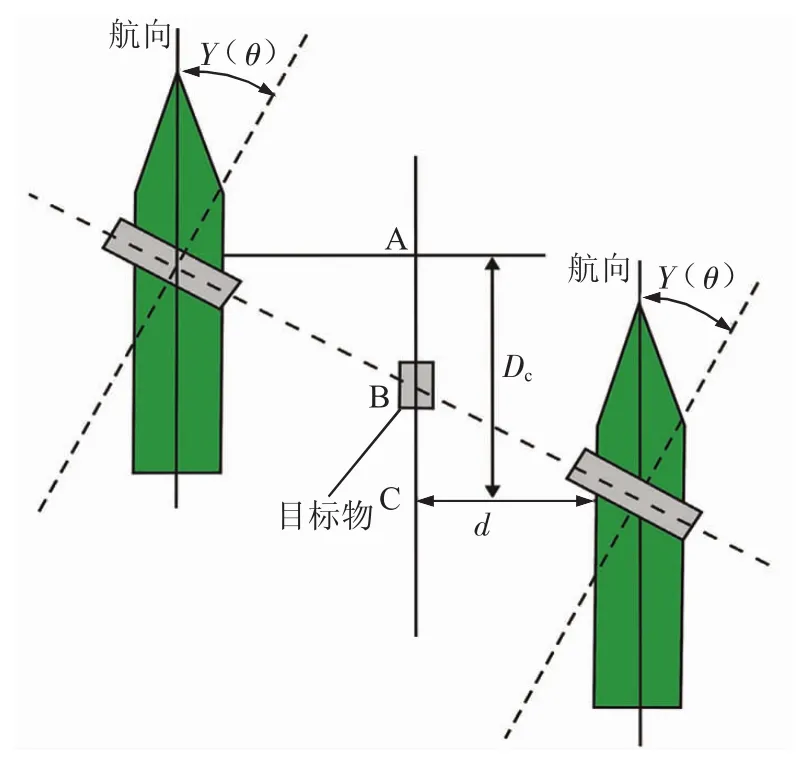
图7 艏摇偏差校正示意
1.4 延时校正
当GPS接收机与多波束采集数据之间存在时间延迟时,会导致测量地形在航向上发生整体偏移,即为延时偏差[17]。对这种误差的校正方法为:在测区内选定一个典型目标A,布设一条通过A的测线,校正过程见图8。
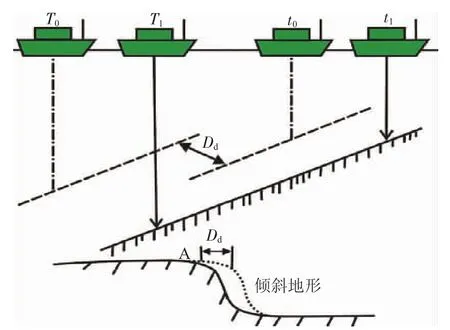
图8 时间延迟校正示意
延时校正可用下式计算

式中:DT为时间延迟,s;Dd为两次测量的特征地形沿相同航迹方向的偏移量,m;Vh为较高的航速,m/s;Vl为较低的航速,m/s。
校正时沿航向选择特征地形的中央波束,利用多波束系统软件自动计算,分粗算、精算、极精算三步进行,逐步缩小计算范围,得出最优值。通常,可以利用软件的断面查看器判读校正效果,如果特征地形吻合或者吻合趋势较好,则校正值可以采用[18]。
2 工程应用
2.1 测量方案制订
本测量项目为赵东区域某海上油田航道的维护性疏浚土方量计算提供依据。测量水深之前,先确定调查作业测线。在布设测线时,按照相关规范及技术要求,同时考虑到海流状况,保证多波束测深仪探测时测量船舶航行的匀速与稳定,测线间距定为20 m,符合规范要求。在测线方案中,布设不进行系统校正和进行系统校正的测线各2条,用来进行水深测量效果对比分析;按规范要求数目布设主测线15条和水深联络测线8条(见图9)。根据测量结果,若显示主测线与检查线(水深联络测线)相交处水深基本吻合且处于设计水深值误差范围内,测量水深图及地形图与航道设计水深图及地形图(见图10)相符,表明水深测量成果符合规范要求[18]。

图9 水深测量测线布设方案
2.2 系统校正作业
本测量项目的航道水深地形测量设备使用HT-300S多波束测深系统。测深系统换能器安装在测量船侧,以降低噪声影响且不易产生气泡;运动姿态传感器(MRU)安装在平行于测量船的轴线的驾驶舱中;电罗经安装在测量船的艏艉线上,方向指向船首;导航定位GPS天线安装在测量船顶部开阔的位置(见图11)。水深测量校正前,先精确量取多波束换能器吃水深度,姿态传感器、GPS与换能器之间的相对位置距离,使系统各部分的安装测量准确度≥0.05 m[19]。
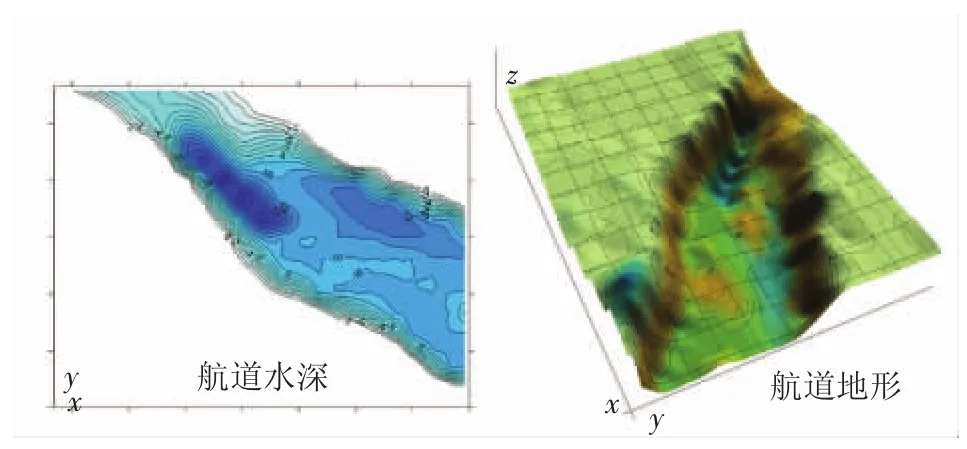
图10 航道设计水深图与地形图
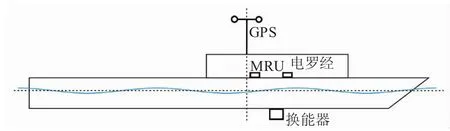
图11 多波束测深系统安装示意
分别选择系统校正和未校正测线进行水深测量,以此来分析未校正水深数据测量偏差。根据文中阐述的多波束系统横摇、纵摇、艏摇、延时以及声速校正方法,在设定的系统校正测线上进行校正操作。
纵摇校正时,以相同速度,沿相反方向,两次通过同一测线进行;横摇校正时,也以相同速度,沿相反方向,两次通过同一测线进行,与纵摇校正相似;艏摇校正时,以相同速度,沿同一方向,通过等长的两条测线进行;延时校正时,以两种不同速度,沿同一方向,两次通过同一测线进行。校正过程分析见表1。
2.3 未校正测量与分析
对测量所得的水深数据使用专业软件进行处理,选取未校正测线与联络测线交点处的水深值进行对比。从对比可以看出,未进行系统校正的测量水深数据点具有明显异常特征,普遍相比航道设计水深值小(见表2),误差范围最大可达80%,不符合水深测量标准规范要求。
对未进行校正的水深测量数据进行成图,得出的水深图具有明显的异常区,海底地形图中也明显可见异常地形(见图12),与航道设计参数(见图10)不相符。
2.4 校正测量与分析
校正测量时,通过船速要均匀,把定航向减小航迹线偏移,增加重合区域[20]。测量过程中,当船体姿态有明显改变、换能器或运动姿态传感器位置移动、测线重合不好时,重新进行系统参数的校正[21]。

表1 多波束测深系统误差校正

表2 未校正测量的水深值与设计值对比
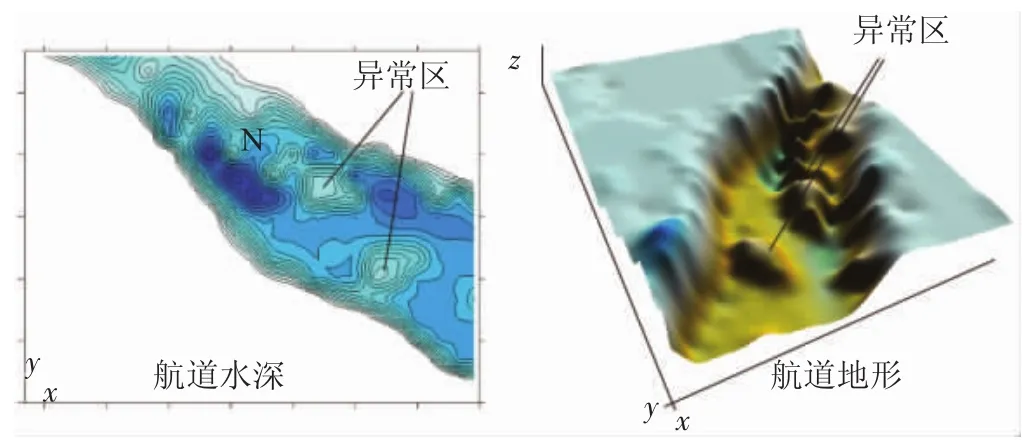
图12 系统未校正测量的航道水深图与地形图
对测量所得的水深数据使用专业软件进行处理,对每条测线进行仔细检查,去掉边侧漂移点及明显失真测深点的数据后,生成水深测点数据无明显异常特征(见表3),误差范围多集中在5%,符合水深测量标准规范。
对进行校正的水深测量数据进行成图,得出的航道测量区域水深图和地形图无明显异常区域(图13),与航道设计参数(图10)相符。

表3 校正测量的水深值与设计值对比

图13 系统校正后测量的航道水深图与地形图
2.5 技术方案评价
通过设定系统校正和未校正测量方案,得出的未进行系统校正的水深数据具有明显异常点,进行系统校正的水深数据平滑连续,得出的航道海底地形图也更加真实,符合航道设计特征。多波束测深系统校正过程可有效减小测量误差,剔除多束测深异常点,减小水深测量系统误差,使得测量结果更加合理准确,表明多波束测深系统校正技术应用于实际测量作业中是科学有效的。
3 结束语
多波束测深系统进行水深地形测量时,系统换能器存在的纵摇、横摇、艏摇差及延时偏差,直接影响水深测量质量。通过调整仪器设备、进行设备校正操作,可以减小测量误差,获得高质量的测量数据和提高海洋勘察测绘作业效率。本文结合实际工程作业,较为系统地介绍和验证了多波束测深系统校正技术在水深地形测量中的科学有效性,对多波束测深系统的水深地形测量作业具有较好的参考指导作用。
[1]HEALY T.Channel Dredging,Dredge spoil migration and downdrift[J].New Zealand Geographer,2008,50(2):3-6.
[2]BROWN C J,SMITH S J,LAWTON P,et al.Benthic habitat mapping:A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques[J].Estuarine Coastal&Shelf Science,2011,92(3):502-520.
[3]FOX C G,CHADWICK W W,EMBLEY R W.Evaluation of arctic multibeam sonar data quality using nadir crossover error analysis and compilation of a full-resolution data product[J].Computers&Geosciences,2014,66(2):228-236.
[4]孙革.多波束测深系统声速校正方法研究及其应用[D].青岛:中国海洋大学,2007:58.
[5]FLINDERS A F,MAYER L A,CALDER B A,et al.Evaluation of arctic multibeam sonar data quality using nadir crossover error analysis and compilation of a full-resolution data product[J].Computers&Geosciences,2014,66(2):228-236.
[6]余平,刘方兰,肖波.多波束关键技术——波束形成原理[J].南海地质研究,2005(1):67-73.
[7]李家彪.多波束勘测原理技术与方法[M].北京:海洋出版社,1999:92-96.
[8]CUTTER G R,BERGER L,DEMER D A.A comparison of bathymetry mapped with the Simrad ME70 multibeam echosounderoperated in bathymetric and fisheries modes[J].Ices Journal of Marine Science,2010,67(6):1 301-1 309.
[9]黄承义,肖春桥,田丰,等.基于EM系列多波束水深测量的声速剖面校正方法及技巧[J].测绘通报,2012(S1):698-699.
[10]刘胜旋,关永贤.多波束系统的参数误差判断及校正[J].海洋测绘,2002(1):33-37.
[11]YU J,HENRYS S A,BROWN C,et al.A combined boundary integral and Lambert's Law method for modelling multibeam backscatter data from the seafloor[J].Continental Shelf Research,2015,103:60-69.
[12]韩李涛,阳凡林,孔巧丽,等.多波束测深系统校正参数求解方案及可视化实现[J].测绘科学,2011(4):108-110.
[13]张海涛,唐秋华,周兴华,等.多波束测深系统换能器的安装校正分析[J].海洋通报,2009,28(1):102-107.
[14]马建林,金菁,刘勤,等.多波束与侧扫声纳海底目标探测的比较分析[J].海洋测绘,2006,26(3):10-12.
[15]赵建虎,刘经南.精密多波束测深系统位置修正方法研究[J].武汉大学学报信息科学版,2002,27(5):473-477.
[16]王闰成.多波束测深系统的安装校正[J].海洋测绘,2003,23(1):34-37.
[17]李素江.应用PPS消除多波束水深测量的导航延时[C]//第十九届世界疏浚大会论文集.北京:世界疏浚大会,2010:52-61.
[18]吴英姿,徐新盛,乔力争.多波束测深系统的精度评估方法研究[J].海洋技术学报,2003,22(3):65-69.
[19]张宝平.中海油海上导航定位技术发展综述[J].石油工程建设,2015,41(2):1-4.
[20]吴永亭,陈义兰.多波束系统及其在海洋工程勘察中的应用[J].海洋测绘,2002,22(3):26-28.
[21]周丰年,赵建虎,周才扬.多波束测深系统最优声速公式的确定[J].应用海洋学学报,2001,20(4):411-419.
猜你喜欢
声学与电子工程(2021年3期)2021-10-13
黑龙江水利科技(2021年8期)2021-09-03
珠江水运(2020年22期)2020-12-23
土木与环境工程学报(2019年6期)2020-01-13
城市道桥与防洪(2019年5期)2019-06-26
电子制作(2018年2期)2018-04-18
水下无人系统学报(2017年5期)2017-11-22
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
海洋技术学报(2016年2期)2016-10-25
雷达与对抗(2015年3期)2015-12-09
