基于IFF信号单站无源定位技术研究
2018-02-28 10:53徐盼盼柏如龙
无线电通信技术 2018年2期
孙 超,徐盼盼,柏如龙
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
对空中目标辐射源单站无源定位技术一直是电子侦察领域的一个研究难点[1]。当前单站无源定位技术的主要对象是固定目标或者匀速运动的目标,而对空中机动目标单站无源定位技术研究较少,难度较大。利用空中目标发射的IFF信号中包含高度信息的特点,基于方位、俯仰和高度3个观测量,建立单站定位模型,可实现对空中目标的单站无源定位。刘睿岚教授早在2006年就提出了利用二维测向+解译高度值的单站定位算法[2],文献中采用的测向算法是双平面单脉冲测向,测向精度有限。文中主要研究基于相位差和解码信息的多目标分离、高精度测向定位技术以及基于广播式自动相关监视信号(ADS-B)误差校准等关键技术,并在此基础上分析了针对民航飞机的实际应用情况。
1 IFF应答信号解译
从20世纪30年代美国率先研制出具有代表性的第一代IFF系统以来,到目前为止最有代表性的IFF系统有MARK X系统、MARK XII(A)系统和S模式。
1.1 MARK X系统应答信号高度信息解译
MARK X的应答信号是由一组脉冲信号构成,其信号格式如图1所示[3]。
应答信号由2个框架脉冲F1、F2及位于框架脉冲之间的13个脉冲宽度为0.45 μs的脉冲信号组成。相邻脉冲之间的间隔为1.45μs,13个脉冲不一定都有,如果有脉冲,则表示为1,没有脉冲则表示为0。脉冲信息由A(A1,A2,A4)、B(B1,B2,B4)、C(C1,C2,C4)及D(D1,D2,D4)组成,共12个脉冲,中间脉冲X不作使用,专用位置显示脉冲 (Special Position Indicator,SPI)位于F2之后4.35 μs处,一般不使用,当2架飞机距离较近时,才使用该脉冲。12个脉冲信息可以给出4 096种组合用于传送信息,表1 给出了各种应答模式下所使用的编码。

图1 MARK X应答信号格式
表1 应答信号编码

模式类型码字个数模式132模式24096模式3/A4096模式C2048
模式3/A为飞机身份码询问和应答模式,军民共用。当应答器响应身份询问时,应答码代表身份码。在目标执行任务过程中,身份码具有唯一性,可利用身份码对空中目标进行多目标分离。
模式C应答信号代表高度码,高度码的组成顺序是:D1D2D4、A1A2A4、B1B2B4、C1C2C4。
其中D1~B4按“标准循环码”(也叫格雷码)编码,它的最小递增单位为500英尺,C组码是“五周期循环码”,其最小递增单位为100英尺。这样,当C组码连续递增5次(累计增量500英尺),标准循环码递增一次。由模式C应答信号,可获得目标的高度值[9]。
1.2 S模式应答信号高度信息解译
S模式应答信号分为长S模式和短S模式,信号格式如图2 所示。S模式应答引导脉冲总共4个,脉冲宽度均为0.5 μs。
数据块根据脉冲位置进行调制编码。每比特数据码对应于1 μs的时间。在编码过程中,1 μs又分成2个周期,各占0.5 μs。若第一个周期有一个脉冲,而第二个周期无脉冲,则对应的信息码为1。反之,若第一个周期无脉冲,而第二个周期有一个脉冲,则对应的信息码为0。

图2 S模式应答信号格式
长S模式数据长度为112 bit,短S模式数据长度为56 bit,根据询问信号的要求来确定应答使用哪一种模式。不管长S模式还是短S模式,最后的24位校验位。S模式信号可解译得到地址码、位置、速度、身份等信息。其中地址码共24 bit,是国际民航组织为每架飞机分配的唯一标识,可用来进行多目标分离。高度信息的解译与Mark X系统高度解译类似[4],这里不再详细描述。
2 时域参数检测与模式识别
2.1 时域参数检测
IFF信号时域参数,即脉冲描述字,包括脉冲到达时刻(TOA)、脉冲宽度(PW)、脉冲幅度(PA)等,脉冲描述字检测原理如图3所示。
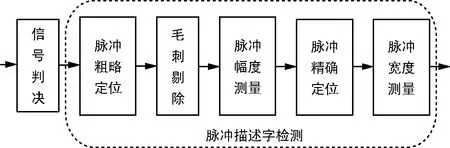
图3 敌我识别信号时域参数检测原理
① 计算脉冲检测门限Threshold,将信号中所有小于门限值Threshold的样点置零;
② 检测脉冲上升沿、下降沿,并计算脉冲宽度PW,实现脉冲的粗略定位;
③ 根据脉冲宽度设置门限,将脉宽小于门限的毛刺剔除;
④ 计算脉冲上升沿和下降沿之间信号的最大幅度,按照幅度的一半进行截取,获得脉冲的起止时刻,实现对脉冲的精确定位;
⑤ 脉冲精确定位之后,利用脉冲的起止时刻计算得到精确的脉冲宽度。
2.2 脉冲分选和模式识别
根据测得的时域、频域参数,进行脉冲信号的分选与模式识别。在测量出各脉冲时域参数的基础上,根据敌我识别信号格式及技术参数[9]分析,进行脉冲的分选与信号模式识别。敌我识别信号脉冲分选与模式识别原理如图4所示。
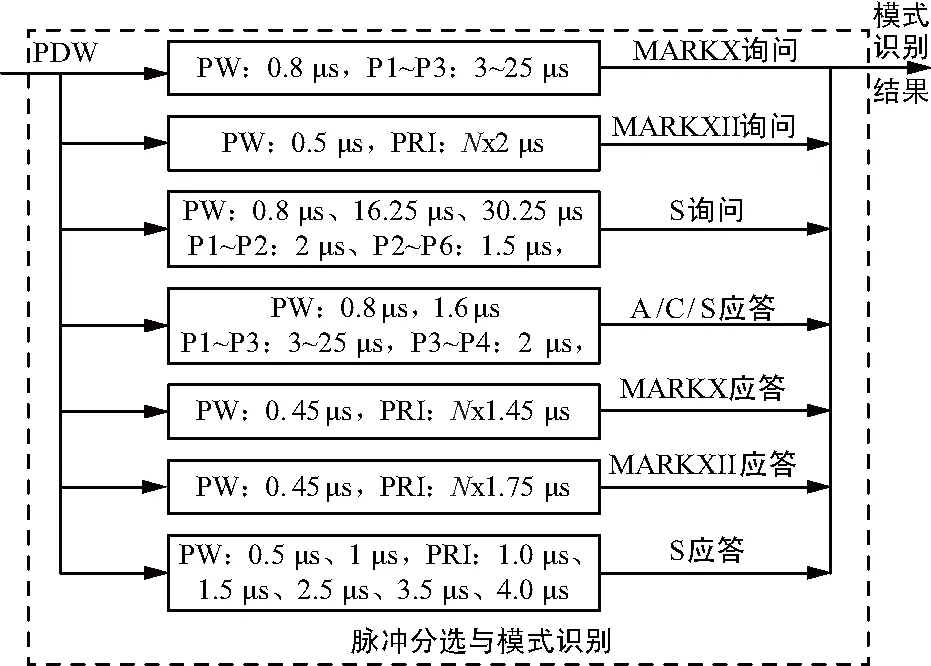
图4 敌我识别信号脉冲分选与模式识别原理
对于询问信号,筛选出脉冲宽度为0.5 μs、0.8 μs、16.25 μs、30.25 μs的脉冲。
对于脉冲宽度为0.5 μs的脉冲,再筛选出脉冲间隔为2 μs的整数倍的脉冲,并将符合宽度为0.5 μs、间隔为2 μs整数倍的脉冲串识别为MARK XII(4)模式;
对于脉冲宽度为0.8 μs的脉冲,分析脉冲间隔,如果2个脉冲之间的间隔为3/5/8/17/21/25 μs,则将该脉冲串分别识别为1、2、3/A、B、C、D模式;如果在第2个脉冲之后的2 μs处出现宽度为0.8 μs或1.6 μs的P4脉冲,则将其识别为A/C/S全呼叫模式;
对于脉冲宽度为0.8 μs的脉冲,如果2个脉冲之间的间隔为2 μs,则进一步检测P6脉冲,根据P6脉冲持续时间为30.25 μs或16.25 μs分别将其识别为长S模式或短S模式;
对于应答信号,筛选出脉冲宽度为0.45 μs、0.5 μs、1.0 μs的脉冲。
对于脉冲宽度为0.45 μs的脉冲,再筛选出脉冲间隔为1.45 μs的整数倍的脉冲,如果检测到框架脉冲,则将其识别为MARK X应答模式;将脉冲间隔为1.75 μs整数倍的脉冲识别为MARK XII(4)应答模式;
对于脉冲宽度为0.5 μs或1.0 μs的脉冲,再筛选出脉冲间隔为1.0 μs、2.5 μs、3.5 μs、4.0 μs的脉冲流,如果检测到前导脉冲,则将其识别为S模式应答信号,根据信号持续时间进一步确定为长、短模式。
3 IFF信号测向定位
基于IFF信号单站无源定位模型如图5所示,其中R0为地球半径,Lon0、Lat0、H0分别为接收站经度、纬度、高度,Lon1、Lat1、H1分别为空中目标经度、纬度、高度,H1由IFF应答信号C模式或者S模式解译得出,β为接收站观测到的目标俯仰角,L为目标与接收站之间的距离。

图5 IFF单站无源定位模型
3.1 二维测向
如图6所示,方位基线上的理论相位差φα与方位角α、俯仰角β、方位基线长度lα之间的关系式如式(1)所示。

图6 方位与俯仰在二维测向模型中的示意图
(1)
式中,λ为信号波长。俯仰基线上的理论相位差φβ与俯仰角β、俯仰基线长度lβ之间的关系式表示为:
φβ=2π/λ·lβsin(β)。
(2)
先利用式(2)求解俯仰角β,再将β代入式(1),求解方位角α。
3.2 已知方位俯仰求解目标位置
根据获知的目标方位角α、俯仰角β,解译得到的目标高度H1以及接收站经度Lon0、纬度Lat0、高度H0的条件下,建立定位模型,根据公式推导,目标经纬度的计算公式可表示为:
H=(H1-H0)/arcsin(β)/R,
(3)
Lat1=asin(sin(Lat0)cos(H))+cos(Lat0)sin(H)cos(α)),
(4)
Lon1=Lon0+
(5)
式中,R表示为地球半径。
4 IFF单站定位系统校准
IFF应答信号长S模式中包含了ADS-B信号, ADS-B信号中包含民航飞机的位置信息,可以实时解译出民航目标的经度、纬度、高度信息[5]。利用这种特性,可将民航目标上的ADS-B设备作为校准源、ADS-B信号作为校准信号,对系统进行误差校准。
4.1 利用ADS-B信号精确估计方位和俯仰
根据接收站的经纬度Lon0、Lat0、H0及目标的经纬度Lon1、Lat1、H1,按照定位模型可将方位角α、俯仰角β,表示为:
(6)
(7)
式中,L表示民航目标与接收站之间的距离。
4.2 通道相位误差估计
在求得理论上的方位角和俯仰角后,继续对通道误差进行校准。利用通道误差公式
Error方位= mod(α-[l方位×cos(α理)×
cos(β理)×360×f/c],360),
(8)
Error俯仰= mod(β俯仰-[l俯仰×sin(β理)×
360×f/c],360)。
(9)
分别求得不同基线长度(不同通道之间)的误差值,各自求平均值,作为通道误差校准值。
5 试验结果
5.1 通道相位误差估计结果
通过外场试验数据测试系统性能,在实际信号环境中,对一段时间内多个民航目标发射的IFF信号进行侦收,并且筛选出其中的ADS-B信号,解译出民航目标的位置信息。首先利用式(6)和式(7)求解出理论上的俯仰角和方位角,然后利用式(8)和式(9)计算得到通道误差曲线,剔除每条基线的相位误差散点后再求平均,实现对基线通道相位误差的高精度估计,如图7所示。

图7 方位俯仰基线通道相位误差曲线
5.2 二维测向结果
完成对系统误差的校准之后,在实际信号环境中,对空中的民航目标发射的IFF信号进行侦收和处理,其中方位测向和俯仰测向的结果如图8所示。
对图8中方位测向和俯仰测向结果分别与ADS-B解译得到的方位俯仰结果进行比较,得出结论:方位精度优于0.4°,俯仰精度优于0.3°。
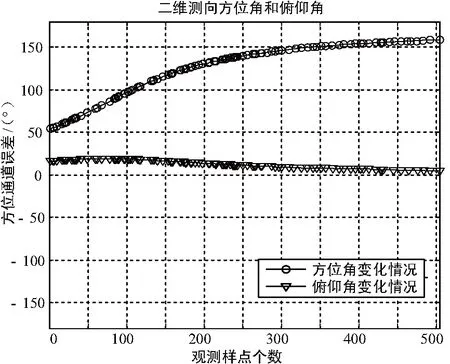
图8 对空中目标二维测向结果曲线
5.3 单站定位结果
在实际信号环境中,对空中民航目标进行定位,其定位结果与ADS-B解译位置信息进行比较,得到定位精度的曲线如图9所示。

图9 对空中目标定位误差曲线
从图9的定位误差曲线可以看出,在200 km以内,系统的定位精度在1%~1.5%之间,随着目标距离的增加,定位误差逐渐增大。
6 结束语
对基于IFF信号单站无源定位技术进行了研究,并通过侦收实际信号环境中的IFF信号验证了二维测向+高度的定位体制的可行性。该技术需要的设备量小,实现简单,未来可布置在岛礁、偏僻西部山区对空域中的民航目标、无人机甚至军事目标进行监视与跟踪,具有重大的推广价值。
[1] 张军.空域监视技术的新进展及应用[J].航空学报,2011,32(1):1-14.
[2] 刘睿岚,钟民.基于敌我识别信号的单站无源定位技术研究与实现[C]∥2006军事电子信息学术会议论文集.北京,2006:1265-1269.
[3] RTCA DO-260A.Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance-Broadcast(ADS-B) and Traffic Information Services-Broadcast(TIS-B)[S],2003.
[4] 钱眺,茅玉龙,查荣.混叠敌我识别信号分离算法研究[J].无线电工程, 2011, 41(1):18-21.
[5] 彭良福,郑超,刘志刚.1090ES广播式自动相关监视系统的CPR算法[J].中国民航大学学报,2010,28(1):33-37.
[6] 张涛,唐小明,金林.ADS-B用于高精度雷达标定的方法[J].航空学报,2015,36(12):3947-3956.
[7] 郑攀,程婷,何子述.二维干涉仪测向算法研究[J].现代电子技术,2013,36(1):1-4.
[8] 李淳,廖桂生,李艳斌.改进的相关干涉仪测向处理方法[J].西安电子科技大学学报,2006,33(3): 400-403.
[9] 李桓.基于模式A/C和模式S的机载询问及应答机系统[D].成都:电子科技大学,2012.
[10] 赵琨,何玉红.IFF 应答信号实时检测技术[J].无线电通信技术,2012,36(2):52-54.
[11] 任巧.敌我识别S 模式突发DPSK 信号解调算法研究及PDGA 实现[D].郑州: 解放军信息工程大学,2009.
[12] 孙凌宇,罗静,屈佑金.混叠敌我识别信号分离算法研究[J].无线电工程,2011,41(1):18-21.
[13] 李红伟,李仕云,纪学军.一种高精度运动多站无源定位算法[J].无线电工程,2014,44(3):24-27.
[14] 高新平.敌我识别S模式询问信号实时检测技术[J].无线电工程,2016,46(6):27-29.
[15] 杨松.基于峰值比的叠加单滑窗信号检测算法[J].无线电工程,2017,47(4):78-82.
[16] 林肖辉,柏如龙.长时间相干累积算法研究[J].无线电工程,2015,45(4):74-76.
猜你喜欢
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10
幼儿园(2021年12期)2021-11-06
雷达与对抗(2021年4期)2021-03-18
电子制作(2019年12期)2019-07-16
北京航空航天大学学报(2017年6期)2017-11-23
科技与创新(2017年1期)2017-02-16
互联网天地(2016年2期)2016-05-04
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23