
汽车主动悬架作动器故障诊断与控制补偿方法*
2018-03-07 02:17陈双钟孝伟
汽车技术 2018年2期
陈双 钟孝伟
(辽宁工业大学,锦州 121000)
1 前言
与被动悬架相比较,主动悬架能根据汽车的行驶条件对悬架系统的刚度和阻尼特性进行动态自适应调节,使悬架系统始终处于最佳减振状态。目前,对主动悬架控制的研究大部分是基于执行器(作动器)和传感器完好无故障的条件设计的,一旦传感器或作动器出现故障,控制器将出现误控制,影响乘坐舒适性。
近年来,容错控制研究在智能控制领域受到越来越多的重视[1],它可以确保在某些部件发生故障的情况下,系统仍按原有或略有降低(但可接受)的性能指标完成控制任务,如文献[2]中采用全维状态鲁棒观测器,对系统输出进行误差估计,并基于控制率重组的方法对汽车半主动悬架进行容错控制,虽然设计的观测器能够判断出发生故障的时间,但是作动器故障恢复存在延迟。文献[3]设计了H∞控制器作为半主动悬架常规控制器,基于故障诊断观测器提出了作动器在线故障估计算法,由完好作动器补偿单一作动器故障的阻尼力损失,通过推导并结合半主动悬架阻尼力的有界性,得出容错控制下各完好作动器的补偿阻尼力[4]。
本文首先建立二自由度1/4车辆模型,设计LQG控制率和卡尔曼状态估计器,实现系统的状态估计,并以此为基础,在不考虑传感器故障的前提下,对作动器出现增益故障进行实时在线诊断[5-6]。最后根据在线诊断结果,对LQG控制实施控制力的补偿,确保性能指标的最优。
2 车辆建模与主动悬架LQG控制
2.1 二自由度1/4车辆模型建立
建立二自由度1/4车辆悬架动力学模型[7],如图1所示。其中,x1为车身垂直位移;x2为车轮垂直位移;kt为轮胎等效刚度;m1为车身质量;m2为车轮质量;kf为弹簧刚度;cf为悬架阻尼;u为控制输入。

图1 二自由度1/4车辆悬架模型
根据牛顿运动定律,得到运动微分方程为:

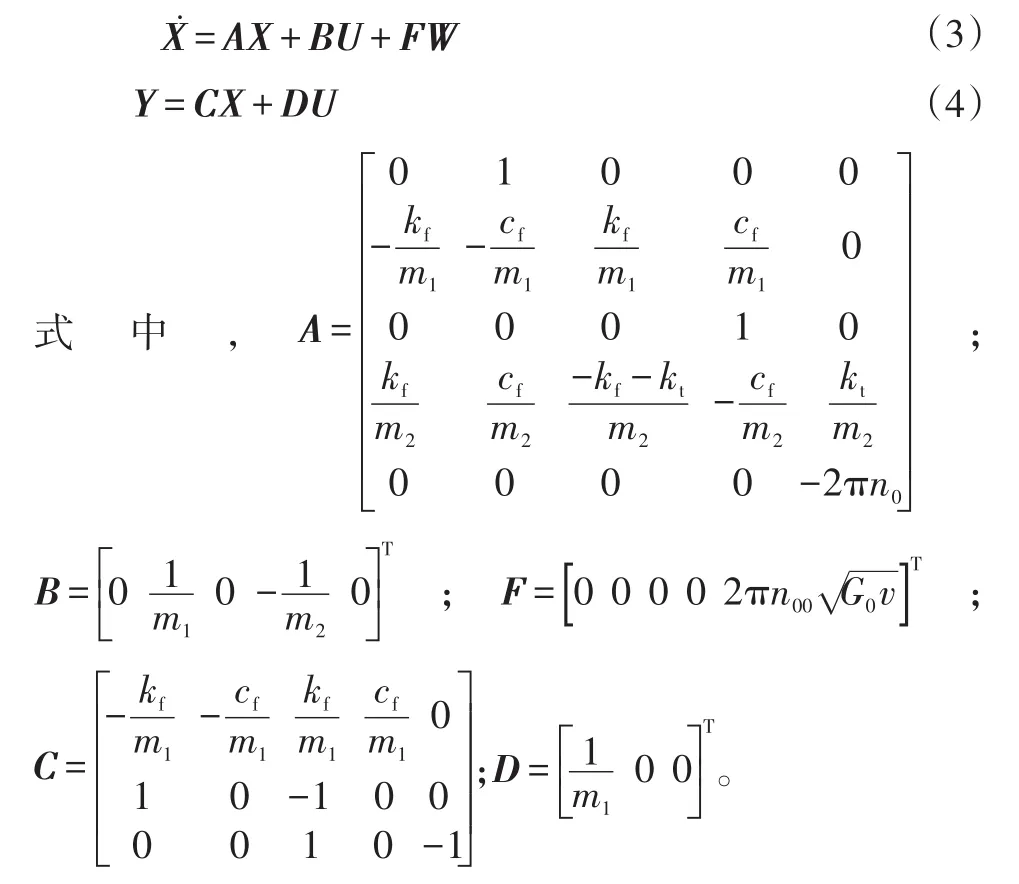
将式(1)、式(2)转换为主动悬架空间表达式:
2.2 车辆悬架LQG控制器设计
对主动悬架模型采用线性二次型最优控制[7],考虑到汽车行驶平顺性、操纵稳定性和降低能耗,选取车身垂直加速度ẍ1、悬架动挠度(x1-x2)、轮胎动行程(x2-q)和控制输入u作为性能评价指标。采用状态调节器,其指标泛函为:

整理成标准二次型形式:

式中,q1、q2、q3、q4为性能评价指标的加权系数为系统状态变量的权重矩阵为系统控制输入变量的权重矩阵;为系统干扰变量的权重矩阵为系统状态变量与控制变量交叉项的权重矩阵为系统状态变量与干扰变量交叉项的权重矩阵。
假设状态变量X中各分量均可测,则根据最优控制律即可得到控制器的控制力:

从式(7)可以看出,只要求出最优反馈增益矩阵,根据任意t时刻的状态变量X(t)即可得到悬架的最优控制力。
3 基于卡尔曼的主动悬架故障检测方法
故障检测方法大致可划分为基于信号处理的方法、基于解析模型的方法、基于知识的方法3类[8]。而基于解析模型的方法又可分为状态估计方法和参数估计方法。目前,常用的状态估计方法包括鲁棒观测器、模糊观测器、神经网络观测器、卡尔曼滤波法等。本文采用卡尔曼滤波算法对悬架系统故障进行检测。
卡尔曼滤波通过实时更新均值和协方差执行滤波过程,基于卡尔曼滤波的状态估计实际上是基于状态变化为一阶马尔科夫过程假设的“预测—校正”的反馈控制器[9]。卡尔曼滤波可分为时间更新过程(预测)和测量更新过程(校正)两部分。时间更新过程根据当前时刻的系统状态获得对下一时刻的先验估计,测量更新过程将测量和先验估计相结合,获得改进的系统后验估计。
本文所建车辆系统的状态方程与观测方程为:

式中,x(k)、x(k-1)分别为k与(k-1)时刻的状态矢量;y(k)为k时刻的观测矢量;u(k)为k时刻的观测噪声;w(k)为k时刻系统噪声。
由于系统是线性的,且系统噪声呈高斯分布,容易得出卡尔曼滤波算法的时间更新和测量更新方程。
a.滤波时间更新
状态预测方程:

误差协方差预测:

b.滤波测量更新
增益方程:

滤波方程:

误差协方差更新:

4 作动器故障在线诊断与控制补偿
当主动悬架作动器发生故障时,控制系统可以根据车身垂向加速度、悬架动挠度、轮胎动载荷,利用卡尔曼滤波方法对悬架状态变量进行实时状态估计,并与悬架控制力的实际状态变量比较得到残差,通过与残差门限值进行比较,在线诊断出作动器发生故障的时间,以便准确地对控制力进行实时补偿,其工作原理如图2所示。

图2 在线诊断与控制补偿方法工作原理
4.1 基于残差的作动器故障在线诊断
本文只考虑作动器发生增益故障的情况。当悬架作动器发生增益故障时,汽车主动悬架系统的状态空间模型也发生相应变化,其模型表达式为:

式中,δ为主动悬架作动器故障增益。
则由式(3)和式(13)可得状态误差为:

将式(15)两侧同时积分可得状态变量的状态残差:

由式(17)可知,当时间t→∞时,由于作动器发生增益故障,残差ΔX不趋向于零向量。
结合设计的卡尔曼滤波估计器可得主动悬架作动器增益估计值:

式中,pinv为求伪逆矩阵。
4.2 控制力补偿方法
控制力补偿在汽车主动悬架作动器发生故障后,不需要改变原主动悬架LQG控制器结构,只需根据前面故障检测与诊断出的信息对作动器的力进行补偿。
由主动悬架LQG控制器设计方法可知,无故障时作动器输出力应为:

若设定作动器发生增益故障时的控制力输出为:

5 仿真与分析
在MATLAB中搭建车辆模型,模型仿真参数见表1。在B级路面,车速72 km/h工况下,设计LQG控制器,并人为设定第5 s起作动器发生0.2倍的增益故障,如图3所示。

表1 车辆模型参数

图3 作动器故障增益
利用前文所述卡尔曼滤波估计方法对所设定作动器增益故障下车辆系统的状态变量进行估计,并与状态变量真实值进行比较,得到的残差信息如图4所示。由图4可以看出,在t=5 s时卡尔曼估计器得到的状态变量估计值与状态变量真实值出现明显差别,表明此时作动器开始出现故障。根据作动器出现故障时刻对故障增益进行估计,得到故障增益估计值为0.2。

图4 悬架性能残差
在此基础上,利用前文所述的控制力补偿方法对主动悬架控制力实施补偿,得到的无故障主动悬架、故障不加容错控制和故障加容错控制的车辆性能指标对比曲线如图5所示,均方根值对比如表2所示。
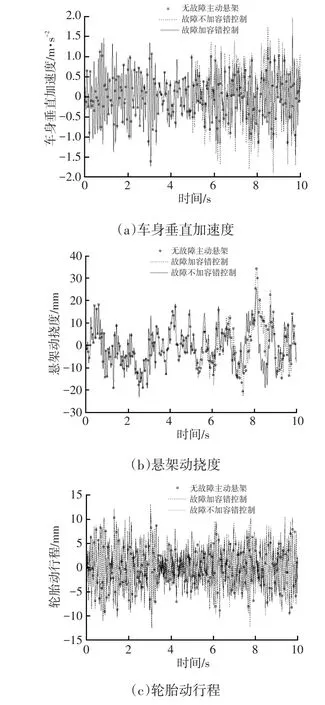
图5 悬架性能对比

表2 悬架性能均方根值对比
从图5及表2可以看出,在作动器发生增益故障时刻t=5 s起,相对完好无故障状态的主动悬架,故障悬架的控制效果明显变差,而增加了控制补偿后的容错控制效果与无故障状态控制效果相近,明显提高了主动悬架控制器的可靠性。
6 结束语
本文基于卡尔曼滤波算法对汽车主动悬架作动器发生故障时的容错控制展开研究。通过设计的卡尔曼估计器对悬架系统的状态变量进行估计,实现对出现作动器故障增益的情况进行在线诊断,并对故障条件下的主动悬架LQG控制实施控制力补偿,提高主动悬架控制的可靠性。研究结果表明,所设计的状态估计器能够很好地完成作动器的故障检测和实施在线检测,控制力补偿方法能够有效地确保主动悬架控制的功能,满足汽车行驶平顺性的要求。
[1]张丽萍,弓栋梁.基于H2/H∞控制的汽车主动悬架被动容错控制[J].汽车技术,2017(11):44-49.
[2]杨柳青,陈无畏,汪洪波.基于残差信息的汽车液压主动悬架故障诊断与隔离研究[J].中国机械工程,2012,23(14):1746-1752.
[3]高振刚,陈无畏,汪洪波,等.基于故障补偿的汽车半主动悬架容错控制[J].汽车工程,2016,38(6):705-715.
[4]Fischer D, Börner M, Schmitt J, et al.Fault Detection for Lateral and Vertical Vehicle Dynamics[J].Control Engineering Practice,2007,15(3):315-324.
[5]Li H,Gao H,Liu H,et al.Fault-tolerant H Control forActiveSuspension VehicleSystemswith Actuator Faults[J].Proceedings of the Institution of Mechanical Engineers Part I Journal of Systems & Control Engineering,2011,226(3):348-363.
[6]Kim H,Lee H.Model-based Fault-tolerant Control for an Automotive Air Suspension Control System[J].Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering,2011,225(11):1462-1480.
[7]喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2017.
[8]陈双,宗长富.车辆主动悬架的遗传粒子群LQG控制方法[J].汽车工程,2015,37(2):189-193.
[9]陈学文,周越,张进国.考虑侧倾影响的汽车横摆角速度与质心侧偏角滤波估计[J].汽车技术,2017(11):40-43.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
汽车实用技术(2021年3期)2021-02-24
家庭影院技术(2020年6期)2020-07-27
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
科技创新与应用(2017年12期)2017-05-08
文教资料(2016年27期)2017-02-23
商场现代化(2016年12期)2016-06-06
企业导报(2016年10期)2016-06-04
