天基通信与太空射电望远镜功能一体系统*
2018-03-24 02:38吴鹏飞祖凤丹付培华胡羽行许雯雯张岚昕
空间控制技术与应用 2018年1期
吴鹏飞,祖凤丹,付培华,胡羽行,许雯雯,张岚昕
0 引 言
随着航天技术的飞速发展,深空探测被各个航天大国重视,传统的地基测控通信系统存在通信距离不够远和通信速率不够快等缺点,而天基通信具有通信距离远、覆盖范围广,受自然条件影响小,抗干扰能力强等优势,因此近年来备受关注,夺取“制天权”、发展天基通信系统具有重要意义[1].
深空网(DSN)是由美国喷气推进实验室管理的一个先进的测控网,是为了对执行月球、行星等探测任务的航天器进行跟踪、导航与通信而建立的地基全球分布测控网.由美国戈尔德斯敦、澳大利亚堪培拉、西班牙马德里3个地面终端设施组成,主要配备70 m天线子网和34 m天线子网,主要波段为L、S、Ka、X[2].在数传速率方面,以Odyssey火星轨道器为通信对象,该轨道器采用了X波段数传,深空网的最大传输速率为256 Kbps;在最远测控通信距离方面,以Voyager1(旅行者1号)为通信对象,发送指令距离最远可达300亿公里,接收探测器发射信号的最远距离为100亿公里左右.从上述调研结果可见,如果想要与更远的探测器通信,无论在速率或是距离上,传统的地基通信都存在较大不足.
另外,20世纪60年代天文学取得了4项非常重要的发现:脉冲星、类星体、宇宙背景辐射和星际有机分子,被称为“四大发现”,这四大发现都与射电望远镜有关.射电望远镜主要用于接收天体辐射的射电波,被用于探测天体射电的强度、频谱和偏振等信息,也可用于发现外星文明,我国在认识到射电望远镜的重要性之后,于2016年建成了口径500 m的世界最大射电望远镜——贵州FAST(five-hundred-meter aperture spherical radio telescope)[3-4].射电望远镜的主要性能指标为分辨率和灵敏度,这两个指标与射电望远镜的口径大小有很大关系,但是口径不可能做到无限大;望远镜周围的电磁环境与大气、云层等干扰对其性能也有着非常大的影响,目前的射电望远镜无法避免地面复杂的电磁干扰和大气、云层等干扰的影响.
为了能够与更远的探测器进行通信,提高通信覆盖范围、提升通信速率,提升射电望远镜的性能,解决目前地基通信和射电望远镜存在的问题,本文提出一种天基通信与太空射电望远镜一体系统,基于分布式协同控制,设计出分布式协同控制方案,建立一个天基主动深空通信系统,并且在功能上融合了射电望远镜功能,将该系统部署到地球静止轨道上,可以极大地提升与探测器通信的最大距离和通信速率,没有地面复杂的电磁干扰和大气、云层,射电望远镜分辨率和灵敏度提升1~2个数量级.
1 系统原理
本设计从世界最大的射电望远镜—贵州FAST中产生灵感,设计出一种天基通信与太空射电望远镜功能一体系统.系统部署在地球静止轨道,由1颗馈源星、1颗中心星和4294颗单元星通过在轨自主组装和精密编队的方式构成,一体化集成了天基主动深空通信功能和射电望远镜功能.4294颗携带边长1.2 m三角形通信/电源复合面板(一面是电磁波反射面板,另一面是太阳能帆板面)的单元星通过在轨自主组装构成口径百米的天线面,中心星对接组装在天线中央,馈源星与天线构成精密编队,精确保持在天线面型的焦点处.
功能一体系统组成如图1所示.

图1 天基通信与太空射电望远镜功能一体系统组成Fig.1 The composition of space-based communication and radio telescope functions integrated system
单元星是质量约为38 kg的小卫星,每颗单元星均由通信/电源复合面板、姿轨控、结构、热控、综合电子、电/气复合推进、电源等分系统构成.每颗单元星携带的通信/电源复合面板在卫星入轨前处于折叠状态,便于减小占用空间.入轨后,复合面板和可伸缩对接杆展开,如图2所示.

图2 单元星折叠与展开状态图Fig.2 Folding and unfolding states of the unite satellite
单元星通过星间链路测距、视觉方位测量与立体视觉等模式实现自主相对导航,通过电-气复合推进系统,实现相对位置和姿态的控制,通过精密编队的方式进入预先设定点,接下来的一颗单元星再进入下一个设定点,单元星之间通过可伸缩对接杆进行对接与组装,两颗单元星对接过程如图3所示.
蜂巢系统组装过程为:19颗单元星与中心星首先通过对接杆在电-气复合推进系统、星间链路测距、视觉方位测量与立体视觉的配合下完成对接组装,形成第一个6 m边长的正三角模块;此后每25颗单元星对接组装成6 m边长的正三角模块,每个模块看成一个整体,采取类似贵州FAST的构建方式,从里圈到外圈逐步对接,整个对接过程在分布式相对测量与控制下完成,最终由几千颗单元星携带的边长1.2 m三角形通信/电源复合面板和1颗中心星拼接组合构成百米口径的天线系统,并且馈源星与天线面保持精密编队,位于抛物面天线的焦点位置处.整个蜂巢系统由于各星之间都是通过高强度碳纤维对接杆组装在一起的,利用Adams力学仿真进行了对接杆的强度分析,根据GB50367—2006,一级碳纤维抗拉强度高于3 400 MPa,对接杆的横截面积为314 mm2,求出对接杆可承受的拉力和压力都在30t以上,因此可以认为,只要蜂巢系统不出现特别大的抖振,对接杆的强度完全可以让星群较为稳定地固连在一起,因而蜂巢系统在轨运行过程中,各星的相对位置可以认为不变.

图3 两颗单元星对接过程Fig.3 Docking process of two unit satellites

图4 多颗单元星对接过程Fig.4 Docking process of unit satellites
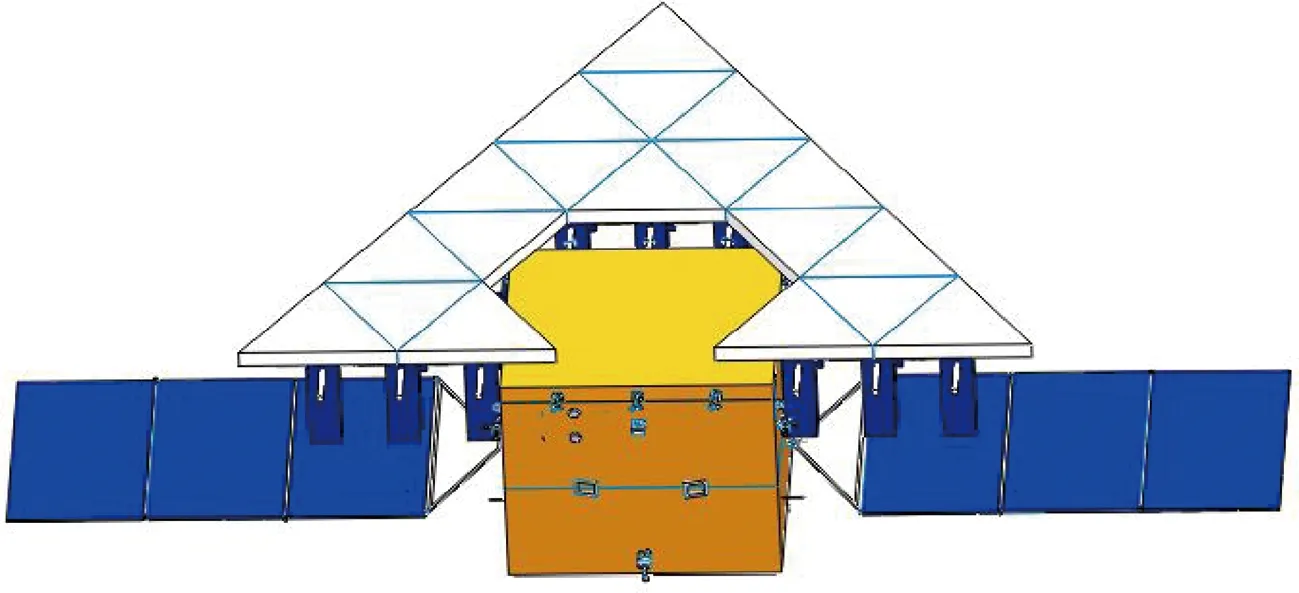
图5 多颗单元星与中心星对接过程Fig.5 Docking process of unit satellites and central satellite
馈源星主要承载射电望远镜的馈源舱载荷和主动通信天线反射面载荷,与百米口径天线构成精密编队,精确地处于天线面型的焦点处,当电磁波反射面板接收到未知天体辐射的电磁波后,反射到焦点处的馈源星,馈源星可以接收后进行高速处理,通过Ka波段下传给地面站.
中心星主要承载深空通信载荷,主要功能为:通过对接组装杆的供电和通信接口,构建覆盖4294颗单元星的总线能源和信息网络,一方面采集单元星复合面板载荷的电能,支撑超远深空遥控所需能源;另一方面作为单元星集群的控制与信息中枢,负责所有单元星的指挥调度与指令控制,采集所有单元星的遥测数据并对地通信.
完成在轨组装和精密编队后,整个系统如图6所示.长期在轨运行过程中,小卫星设计寿命为5年左右,如果天线面板中出现某个复合面板损坏的情况,那么只需要发射一颗单元星重新运送一块复合面板到指定位置处,更换损坏的面板即可,为了节约成本,可以将复合面板与单元星设计成可组合分离式,因而单元星可多次使用.
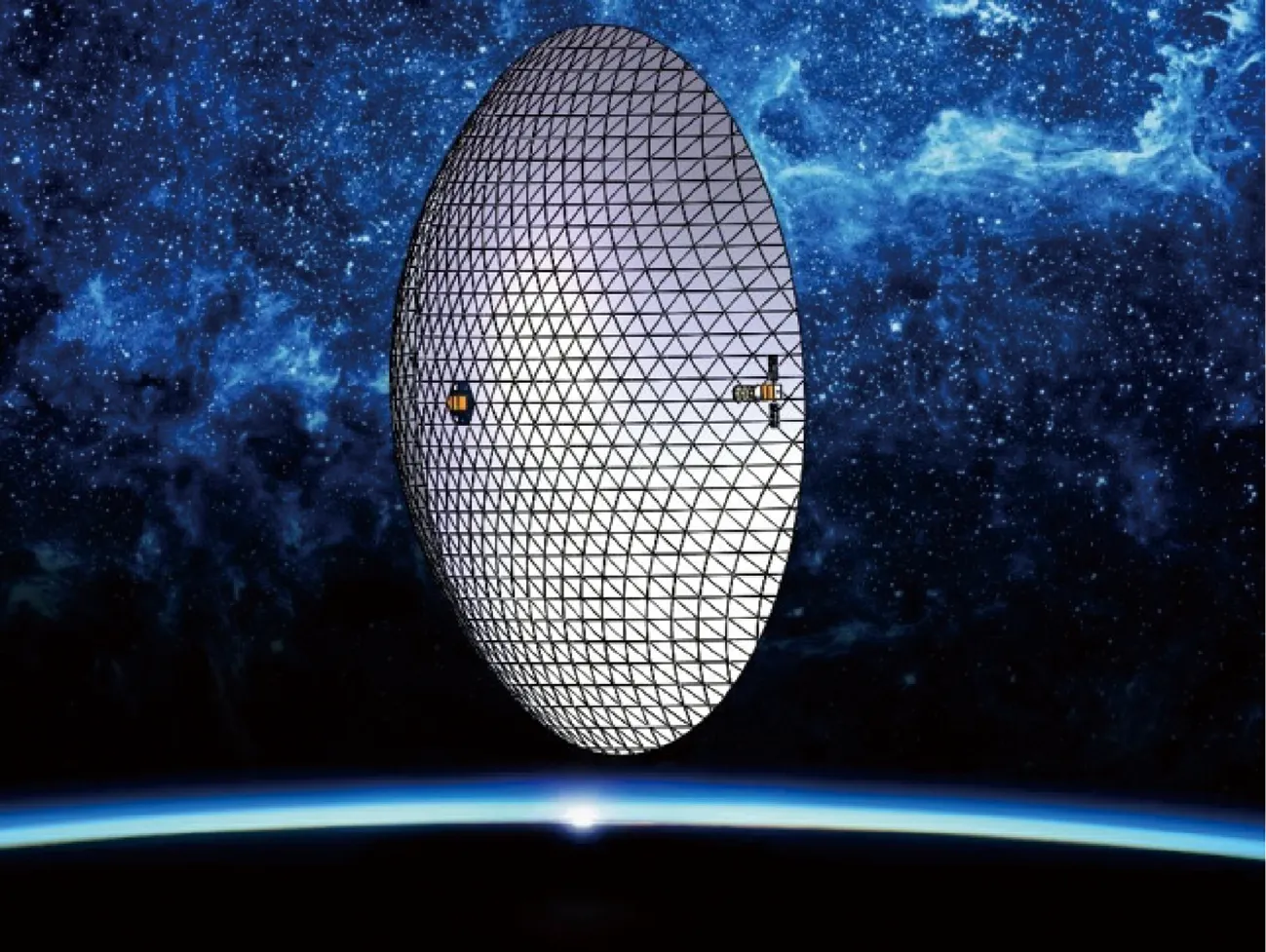
图6 天基通信与太空射电望远镜功能一体系统Fig.6 Space-based communication and radio telescope functions integrated system
2 功能介绍
2.1 天基主动深空通信功能
天基主动深空通信功能是通过本文中的功能一体系统实现对深空探测器的遥测遥控通信和数据接收功能.中心星携带的深空通信载荷和单元星群、馈源星构成的巨型天线面可以用于低速接收深空探测器的遥测信息,高速接收探测器回传的科学数据;也可以接收到地面遥控指令后,主动发送遥控指令给深空探测器.这种主动深空通信的功能可以为深空探测器提供一个星地高速中转站,大幅提升深空探测通信支持距离范围和通信速率.
天基主动深空通信功能示意图如图7~8所示.
2.2 太空射电望远镜功能
在射电望远镜模式下,天线与馈源星通过精密编队的方式构成口径百米的太空射电望远镜.该功能的实现方式是通过巨大的天线面接收空间天体辐射的电磁波信号后反馈给馈源星,馈源星接收到电磁波信号后进行高速处理,将获得的探测数据通过Ka波段数传发送给地面站.
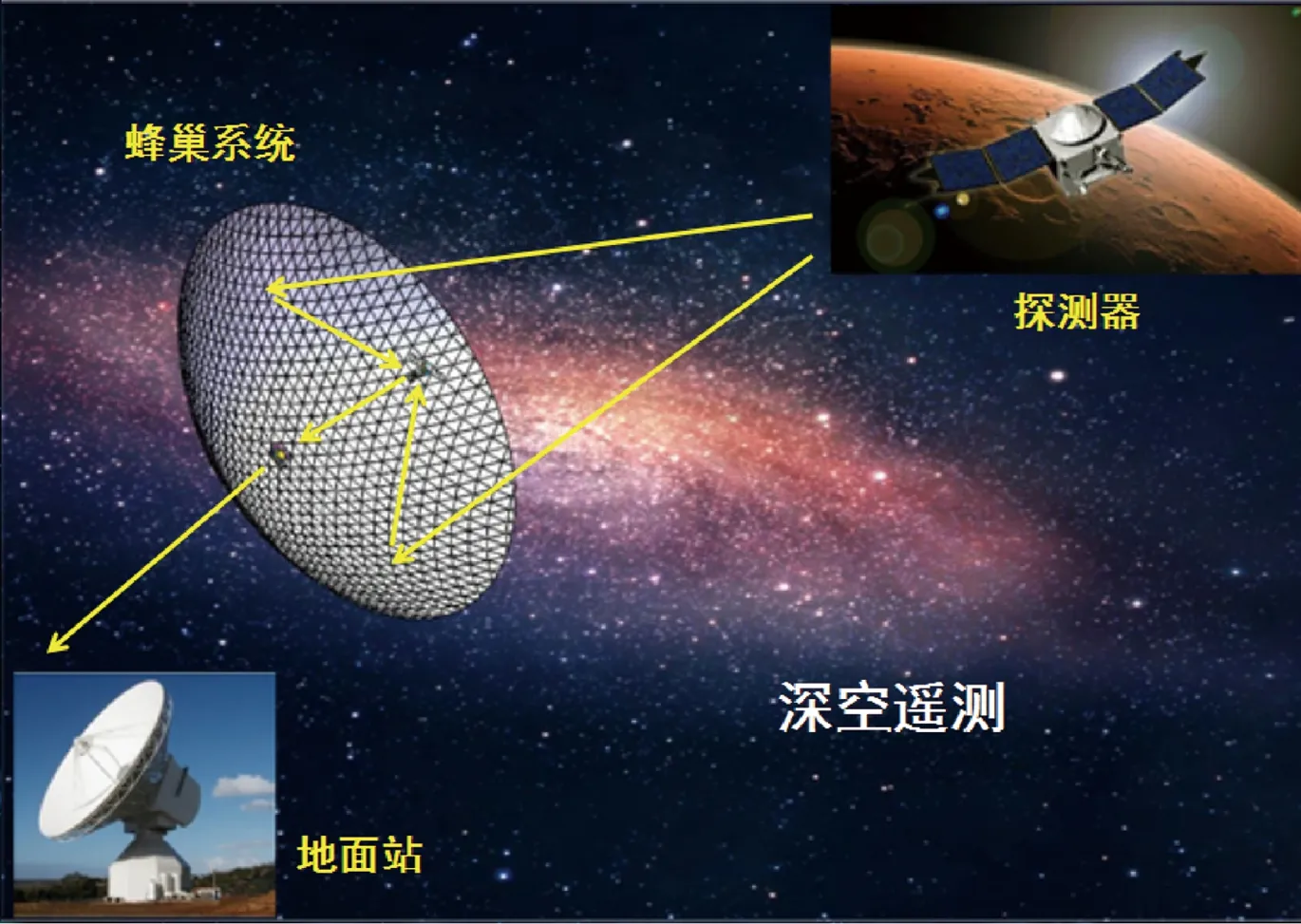
图7 天基主动深空通信功能(接收遥测数据)Fig.7 Space-based active communication (receiving telemetry data)
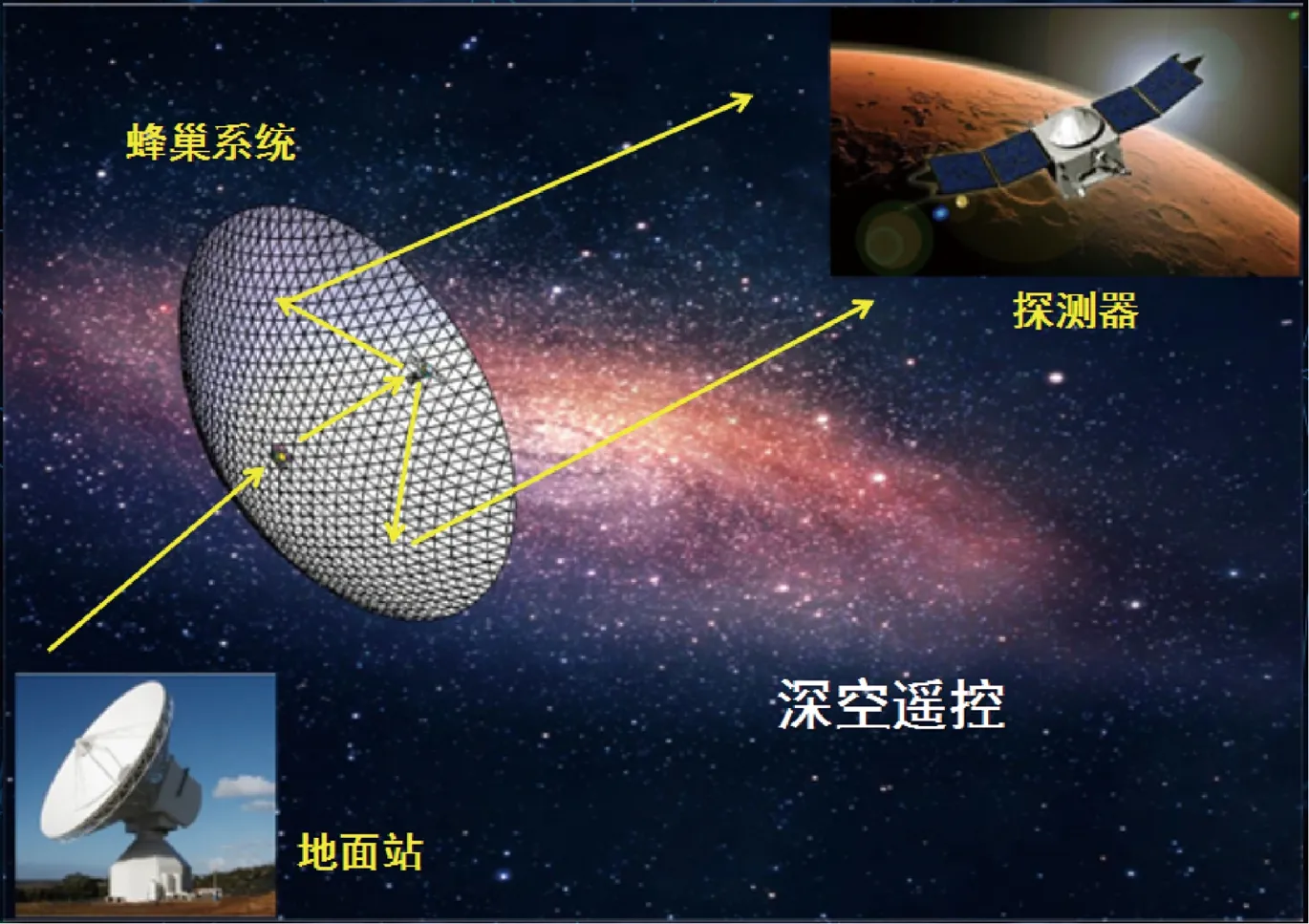
图8 天基主动深空通信功能(发送遥控指令)Fig.8 Space-based active communication (sending instructions)
在该模式下,所有单元星、中心星和馈源星均暂时关闭所有测控通信设备,实现无线电静默和屏蔽,最大限度实现探测回路的纯净电磁环境.
太空射电望远镜可以实现类似我国贵州FAST的空间探测功能,且由于部署在高轨,避免了大气、云层等对电磁信号的衰减,也避免了地面复杂的电磁环境干扰,可以大幅提升射电望远镜的性能指标.
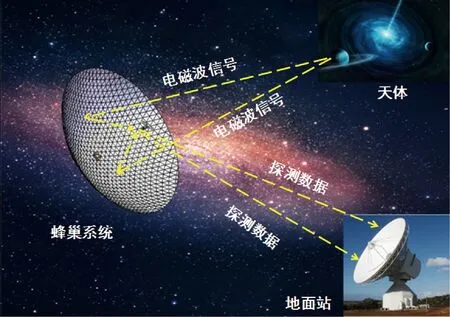
图9 太空射电望远镜功能Fig.9 Space radio telescope function
3 基于分布式协同控制的蜂巢构建过程
将整个“蜂巢”分成172个扇形,其中170个扇形上有25颗星,另外两个扇形(对称分布)上有22颗星.每个扇形中都有一颗主星(参考星),中心星的处理器根据整体需要移动到的姿态和轨道位置,规划出每一个区域需要做出的调整(每个区域的期望状态),然后把指令(每个区域的期望状态)分别发给各个区域的参考星,参考星上的控制器分析区域内各个卫星的期望状态,发给各个卫星,再进行整体移动.
将组成“蜂巢”的卫星视为增加了约束的编队卫星,本文所研究的卫星姿态轨道耦合有限时间分布式协同控制问题可以描述为:在编队卫星成员仅测量自身的状态和通信拓扑为无向图的条件下,根据任意编队卫星中第i个卫星的姿态轨道耦合模型,基于行为控制的思想,利用一致性算法,设计具有统一形式的有限时间分布式协同控制器ui.控制器ui,使系统状态ei、ωi、ρi和υi在有限时间内收敛到平衡点,ei为卫星自身的姿态,ωi为角速度,ρi为卫星相对参考航天器的位置矢量,υi为速度矢量.ei-ej和ρi-ρj在有限时间内收敛到0.
假定参考航天器运行在椭圆轨道上,航天器编队系统的坐标系示意图如图10所示.其中OIXIYIZI为赤道惯性坐标系,记为FI,ocxcyczc为参考航天器轨道坐标系,记为Fc.rc和ri分别为从地心到参考航天器和第i个航天器质心的位置矢量.
第i个编队卫星成员仅测量自身的姿态ei、角速度ωi、第i个编队卫星相对于参考航天器的位置矢量ρi和速度矢量υi.第i个编队卫星成员通过无线传输按照一定的拓扑结构得到第j个编队卫星成员(相邻卫星)的状态信息ej、ωj、ρj和υj.第i个编队卫星成员利用自身的状态信息ei、ωi、ρi和υi和相邻编队卫星成员的状态信息ej、ωj、ρj和υj计算出与相邻编队卫星成员之间的相对信息.本章所采用的拓扑结构为无向图.

图10 航天器编队系统的坐标系示意图Fig.10 Spacecraft in formation flying
令ρi和υi分别为第i个航天器相对于参考航天器的位置矢量和速度矢量在ocxcyczc坐标系下的表示,则相对运动方程在ocxcyczc系下表示为:
(1)
(2)
其中,
(3)
(4)
(5)
(6)
(7)
(8)
式(2)中,mi表示第i个航天器的质量,dfi表示第i个航天器所受到的外部扰动力,fbi为作用于第i个航天器的主动控制力在第i个航天器体坐标系下的表示.μe为地球引力常数,ac和ec分别为参考航天器的轨道半长轴和偏心率.Ri为从第i个航天器的体坐标系到Fi的旋转矩阵.uc=ωc+θc,并且ωc、θc、ic和Ωc分别表示参考航天器的近地点幅角、真近点角、轨道倾角和升交点赤经.

(9)
由式(1)、(2)和(9)可以得到第i个卫星的相对误差运动方程在系ocxcyczc下的表示为
(10)

(11)
记
(12)
具有Euler-Lagrange形式的卫星姿态协同控制模型为
(13)
联合(11)和(13)可以得到第i个卫星姿态轨道耦合的协同控制模型
(14)

4 仿真分析
运行轨道:地球静止轨道,轨道周期:23小时56分4秒,轨道高度H=35 787.97 km,偏心率e=0,定点位置经度:105.42°
4.1 卫星近距离编队构型仿真
每颗星在同轨道上间隔500 m,即期望的相对位置为[-500 0 0],设置PID控制参数:
Kp1=0.062;Kd1=10;Ki1=0.000;
Kp2=0.062;Kd2=10;Ki2=0.000;
Kp3=0.062;Kd3=10;Ki3=0.000.
图11中位置偏差指的是第i个航天器实际位置与期望位置的偏差.由图11可知,最终位置偏差趋近于0,满足编队要求.
4.2 卫星近距离交会对接模式仿真
以双星对接为例(分别为目标星和追踪星),控制策略为控制追踪星X方向的相对速度到0.02 m/s,采用GPS和导航相机进行导航,飘飞逼近目标星,当两颗星之间的相对距离小于10 m时,打开追踪星的推力器,控制相对位置,当相对距离小于0.5 m时,追踪星逼近的相对速度要小于0.01 m/s,当相对距离小于1 m时,追踪星逼近的相对速度小于0.005 m/s,相对姿态偏差要小于0.1°.
上述仿真中可得出结论:卫星近距离编队的位置偏差会在较短时间内收敛,在交会对接过程中,三轴相对位置和速度满足控制要求.
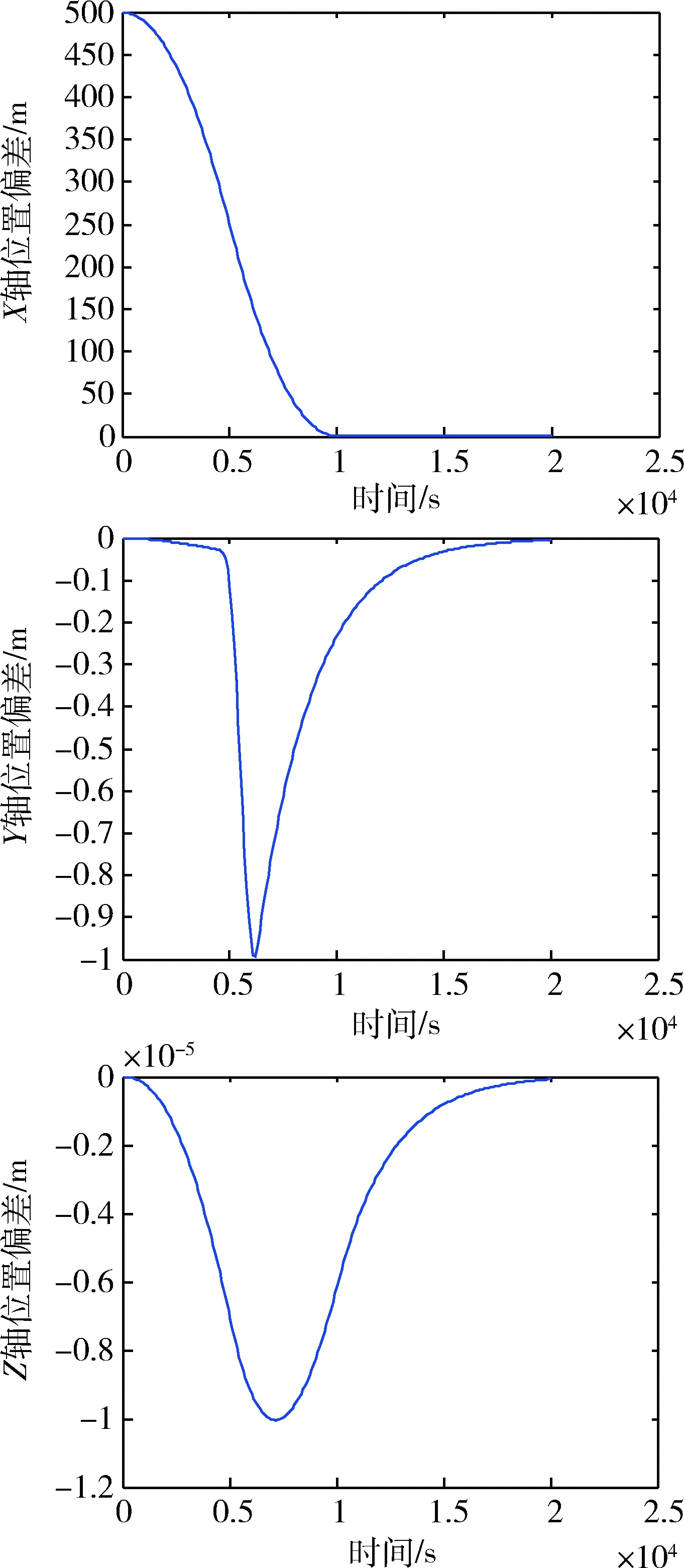
图11 近距离编队构型位置偏差Fig.11 Formation position errors

图12 三轴相对位置仿真图Fig.12 Three-axis relative position simulation
5 系统效能分析
5.1 天基主动深空通信功能与地基通信性能对比
为方便对比,将假定DSN构建地基100 m口径天线,与本文提出的天基通信与太空射电望远镜功能一体系统进行深空通信数传速率、通信距离等能力的对比分析.
在数传速率方面,本系统最大数传速率是目前深空网的22倍,是地面100 m口径天线系统的2.2倍.
在最远测控通信距离方面,本系统对Voyager1的测控信号发送最远距离达到500亿公里,是地基 100 m口径天线的1.67倍.接收Voyager 1遥测信号的最远距离为140 亿公里,是地基10 m口径天线的1.4倍.
5.2 太空射电望远镜功能与地面射电望远镜性能对比
衡量射电望远镜的性能指标主要是射电望远镜的灵敏度Ae/Tsys和射电望远镜的空间分辨率θ.Ae取决于射电望远镜的面积,Tsys=Tsky+TRX,TRX为接收机温度,Tsky包括背景、大气水蒸汽、银河背景温度.当用毫米波时,大气水蒸汽是主要的温度源;当用长波时,银河背景温度是主要的温度源.射电望远镜的空间分辨率θ=λ/D,λ为工作波长,D是射电望远镜的孔径.射电望远镜孔径不变,工作频率越高,波长越短,射电望远镜的空间分辨率越大.
中国的射电望远镜FAST采用的是3 GHz~70 MHz (10 cm~4.286 m) ,美国的射电望远镜 Arecibo采用10 GHz~300 MHz(波长3 cm~1 m),工作频率并不是很高,因为地面上大气水蒸汽是主要的温度源.本文中的太空射电望远镜功能是将100 m口径的射电望远镜搬到地球静止轨道,没有了地面上大气水蒸汽温度的影响,将射电望远镜的工作频段拓宽到Ka波段(26.5~40 GHz,0.75~1.11 cm),可使得射电望远镜的空间分辨率在现有的射电望远镜的基础上提高1~2个数量级. 同时也可最大幅度避免地面复杂电磁环境的干扰,提升系统探测效能.
6 结 论
本文提出了一种天基通信与太空射电望远镜功能一体系统,具有3个创新点:
1)可在轨自主实现主动深空通信、太空射电望远镜两种功能的柔性转换,且每种功能的效能大幅优于地基系统.
2)提出一种在轨自组装自调节的大口径多功能天线,为超大尺度天线在轨构建与面型控制、多功能复合集成、大柔性体指向调节控制等问题提供了解决途径.
3)提出了一种多波段多功能融合的精密编队馈源星,为超大尺度天基射电望远镜构建提供了有效解决途径.
“蜂巢”系统的关键技术在于分布式协同姿轨耦合控制,对卫星群的姿轨控精度要求非常高;另外,在轨大口径天线面型的构建和调整难度也非常高.
本文提出的“蜂巢“系统为未来航天器的发展提供了新思路,建立天基通信系统有利于我国深空探测技术的发展.太空射电望远镜为人类提供了探索未知天体和外星文明的一种手段,且性能远优于传统的地基系统.
[1] 刘经南,魏二虎,黄劲松. 深空网及其应用[J]. 武汉大学学报,2004,29(7) :565-569.
LIU J N, WEI E H,HUANG J S. Deep space network and its applications[J]. Geomantics and Information Science of Wuhan University, 2004,29(7) :565-569.
[2] 王天祥. NASA深空网的改造计划及进展[J]. 科技视界,2015(19):5-6.
WANG T X.NASA deep space network aperture enhancement project and progress[J]. Science & Technology Vision, 2015(19):5-6.
[3] 南仁东,张海燕,张莹,等. FAST工程建设进展[J]. 天文学报,2016,57(6):625-630.
NAN R D, ZHANG H Y,ZHANG H Y, et al. FAST construction progress[J]. Acta Astronomica Sinica,2016,57(6):625-630.
[4] 南仁东. 500 m球面反射面射电望远镜FAST[J]. 中国科学,2005,35(5):449-466.
NAN R D. Five hundred meter aperture spherical radio telescope (FAST)[J]. Science in China(Series G:Physics,Mechanics & Astronomy), 2005,35(5):449-466.
[5] REN G X, LU Q H, HU N, et al. On vibration control with stewart parallel mechanism[J]. Mechatronic, 2004(14):1-13.
[6] 郭永. 编队飞行航天器有限时间协同控制[D]. 哈尔滨:哈尔滨工业大学,2016.
GUO Y. Finite-time coordination control for formationflying spacecraft[D]. Harbin: Harbin Institute of Technology,2016.
[7] 郭熙业,周永彬,杨俊. 基于导航星间链路的天基高精度时间传递方法[J]. 中国科学:技术科学,2017,47(1):71-79.
GUO X Y,ZHOU Y B,YANG J. The space-based high-precision time transfer method based on navigation constellation inter-satellite link[J]. Scientia Sinica Technologica,2017,47(1): 71-79.
[8] 李献斌. 导航星座星间精密测距关键技术研究[D]. 长沙:国防科学技术大学,2015.
LI X B.Research on the key technologies of inter-satellite precise ranging for navigation constellation[D].Changsha: National University of Defense Technology,2015.
[9] 孙晨华. 天基传输网络和天地一体化信息网络发展现状与问题思考[J]. 无线电工程,2017,47(1):1-6.
SUN C H. Research status and problems for space-based transmission network and space-ground integrated information network[J].Radio Engineering ,2017,47(1):1-6.
[10] 黄惠明,常呈武. 天地一体化天基骨干网络体系架构研究[J]. 中国电子科学研究院学报,2015,10(5):460-467.
HUANG H M,CHANG C W. Architecture research onspace-based backbone network of space-ground integrated networks[J].Journal of China Academy of Electronics and Information Technology , 2015,10(5):460-467.
[11] 陈世杰. 天基信息网络安全体系架构研究[J]. 通信技术,2017,50(7):1499-1505.
CHEN S J. Space-based information network security architecture[J].Communications Technology,2017,50(7):1499-1505.
猜你喜欢
军事文摘(2022年12期)2022-07-13
儿童故事画报·自然探秘(2022年6期)2022-07-05
航天器环境工程(2022年1期)2022-03-11
国际太空(2022年1期)2022-03-09
国际太空(2022年1期)2022-03-09
军事文摘(2021年22期)2022-01-18
军事运筹与系统工程(2020年3期)2021-01-18
科技传播(2019年22期)2020-01-14
科教新报(2019年16期)2019-09-10
科学导报(2019年24期)2019-09-03