
履带式小型甘薯秧蔓处理机的设计
2018-03-28 00:49蔡玉虎吕钊钦
农机化研究 2018年3期
蔡玉虎,吕钊钦
(山东农业大学 机械与电子工程学院,山东 泰安 271018)
0 引言
甘薯是重要的粮食、饲料、工业原料及新型的能源用料,是世界粮食生产的底线作物和极具竞争力的优势能源作物,也是优质的抗癌保健食品,是欠发达地区的主要经济收入之一,生产意义重大[2-4]。
我国是世界甘薯生产大国,目前我国甘薯的种植面积和总产量均居世界首位。根据FAO统计资料,2013年我国甘薯收获面积356万hm2,甘薯总产量7 763万t,分别约占世界总产量43%和75%[1]。我国虽然是甘薯生产大国,但其机械化生产技术却十分落后,作业机具的专用化、高效化、系列化程度还较低,区域发展不平衡,严重制约了产业的发展。
甘薯是劳动密集型土下作物,其生产环节主要包括:育苗、起垄、剪苗、移栽、灌溉、中耕、施药及收获等环节。收获包括:割蔓、挖掘、捡拾、清选及收集等。在国内,割蔓环节主要采用人工割蔓,劳动强度大、成本高、效率低,严重影响了农民种植积极性,因此研发适用的甘薯秧蔓处理机具有非常重要的意义。履带式底盘机械设备具有接地面积大、接地比压小、附着性能好、爬坡能力强、转弯半径小及跨沟越埂能力强等优点,多数用于复杂地形机械设备。履带式行走装置广泛用于工程机械和农业机械等野外作业设备[5]。
由于田间土壤比较松软,为减少机械设备的接地比压,减少机械设备对土壤压实产生的不良影响和提高机械设备的通过性,采用橡胶履带式底盘作为行走机构。
对丘陵地区地块较小的土地,大型的机械无法工作,故研究小型的甘薯机械也是当前农业机械发展的趋势。小型机械机动灵活,便于安装拆卸,价格相对便宜,可减少生产成本。经过相关理论研究,本文设计研制出一种履带式小型甘薯秧蔓处理机。
1 总体结构与工作原理
1.1 作业要求
履带式小型甘薯秧蔓处理机作业对象为地块较小的土地,在收货甘薯之前,进行收割秧蔓,收割作业模式为单垄作业。在山东农业大学实验基地进行田间实地测量的甘薯垄形为:两垄沟间中心距为1 000mm,垄顶宽度250mm,垄底宽度500mm,垄高200mm。甘薯垄的模式,如图1所示。

图1 甘薯垄示意图Fig.1 Schematic diagram of sweet potato ridge pattern
1.2 总体结构
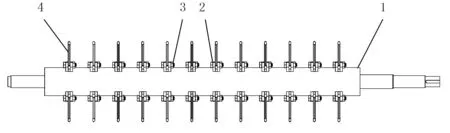
履带式小型甘薯秧蔓处理机主要由动力及传动系统、工作台支架、履带式底盘、切割机构、立式滚筒拨禾机构、输送机构及集秧装置等主要部分组成,如图2所示。

1.挑秧杆 2.藤蔓粉碎刀 3.变速箱 4.绞龙 5.工作台支架 6.简易驾驶室 7.操纵台 8.发动机罩 9.柴油机 10.输送带带轮 11.集秧箱 12.履带行走机构 13.输送带箱体 14.带轮 15.立式滚筒拨禾机构 16.根部圆盘切刀 图2 整体结构图和局部剖视图Fig.2 The overall structure drawing and partial section view
纵向藤蔓粉碎刀安装在整机的前方,主要由刀轴和粉碎刀片组成,采用甩刀式,刀片采用直刀片。其作用主要为切断挑秧杆挑起的秧蔓,使秧蔓变短并且与相邻两垄生长的秧蔓分离,实现模块化切割,可使立式滚筒拨禾机构(喂入机构)和输送机构能够更加高效、快捷地将甘薯秧蔓收集到集秧箱。
一对立式滚筒拨禾机构(喂入机构)竖直安装在工作台支架上,该机构由立式滚筒、盘形凸轮机构及行星齿轮机构组成,其转速相同、方向向内且相反。运用行星齿轮机构,体积小、质量轻、承载能力强、传动平稳,能够符合在尺寸空间较小的情况下实现结构紧凑和平稳传动。盘形沟槽凸轮安装在行星齿轮机构的下方,分3层安装,凸轮机构的从动杆件作为拨禾齿,可解决秧蔓缠绕拨禾齿的问题。
输送机构主要由橡胶传送带、传送带轴、液压油缸及传送带箱体组成。橡胶传送带表面有间距均匀分布的挡板,防止传送的秧蔓滑落。被粉碎过的秧蔓经绞龙输送到传动带上,秧蔓在传送带的末端滑落至集秧箱。
橡胶履带式行走机构采用由“四轮一带(驱动轮、负重轮、支撑轮、导向轮和橡胶履带)”组成,根据作业要求合理地设计出其基本参数,适合甘薯种植田的运行。
1.3 工作原理
作业时,在液压油缸的作用下将前部的收割工作台放下,位于工作台支架下部的根部圆盘切刀将甘薯秧蔓根部切断,纵向藤蔓粉碎刀将秧蔓粉碎成合适的长度,并将收割垄范围内的秧蔓与左右相邻垄内的秧蔓切割分离,从而实现模块化切割。在机器前进速度作用下,被粉碎的秧蔓喂入立式滚筒拨禾机构,通过拨禾机构将秧蔓传给绞龙,并由输送机构运输到集秧箱。主要技术参数指标如下:
外形尺寸(长×宽×高)/mm: 3 575×1 570×1 660
作业幅度/mm:1 000
作业行数:单垄单行
工作速度/km·h-1:3
配套动力/kW:2.205(17.5马力水冷式柴油机)
生产率/hm2·h-1:0.3~0.4
除净率/%:﹥90
留茬高度/mm:﹤75
伤薯率/%:﹤0.8
2 关键部件的设计
2.1 藤蔓粉碎刀
藤蔓粉碎刀采用甩刀式,甩刀片是该装置的核心部件,且容易磨损。刀片的形状和尺寸不仅对刀轴的设计和甩刀片的排列有较大的影响,而且对粉碎秧蔓的效果有较大的影响[6-7]。
刀片按照形状分裂主要有直刀、T型刀、Y型刀、锤爪、L型刀及其改进型刀。根据本机设计要求,采用直刀片,双面开刃。为使刀片具有较高的耐磨性和抗冲击韧性,甩刀材料选用6mm厚65Mn钢片,其结构图如图3所示。

图3 刀片结构图Fig.3 Blade structure diagram
甩刀片的数量要合理,数量过多增大启动扭矩和功率的消耗,数量过少茎秧不能完全切割,起不到粉碎的效果,理论上甩刀的数量为
N=C·L
(1)
式中N—甩刀总片数(片);
C—甩刀的密度(片/mm);
L—甩刀在刀轴上的分布长度(mm)。
对于甩刀的密度C,直刀一般取0.04~0.07;本机的甩刀的作业幅宽为900mm,甩刀片的数量取36片。为减小甩刀的振动,增加机具的平衡性能,甩刀的排列方式选取对称排列分布,刀片在刀轴轴向上等间距分布,在刀轴圆周方向上等角分布(3排刀具,每排刀具之间的夹角为120°)。藤蔓粉碎刀具的总体结构图,如图4所示。
1.刀轴 2.螺栓 3.螺母 4.刀片 图4 藤蔓粉碎刀结构图Fig.4 The structure diagram of seedling crushing knife
甩刀的绝对运动是由机器前进运动和刀具的旋转两种运动的合成,对刀片尖端任意一点运动分析,如图5所示。以刀轴的旋转中心O为原点,经过时间t时刀片尖端任意一点的运动方程为
(2)
对式(2)中时间t进行求导得到的速度方程为
(3)
式中x—刀片尖端水平方向位移(m);
y—刀片尖端竖直方向位移(m);
v1—机具前进的速度(m·s-1);
R—刀片尖端的回转半径(m);
ω—刀片的角速度(rad/s)。
根据运动方程和速度方程对藤蔓粉碎刀运用Adams进行运动学仿真得到刀片尖端的轨迹线,其轨迹线,如图6所示。
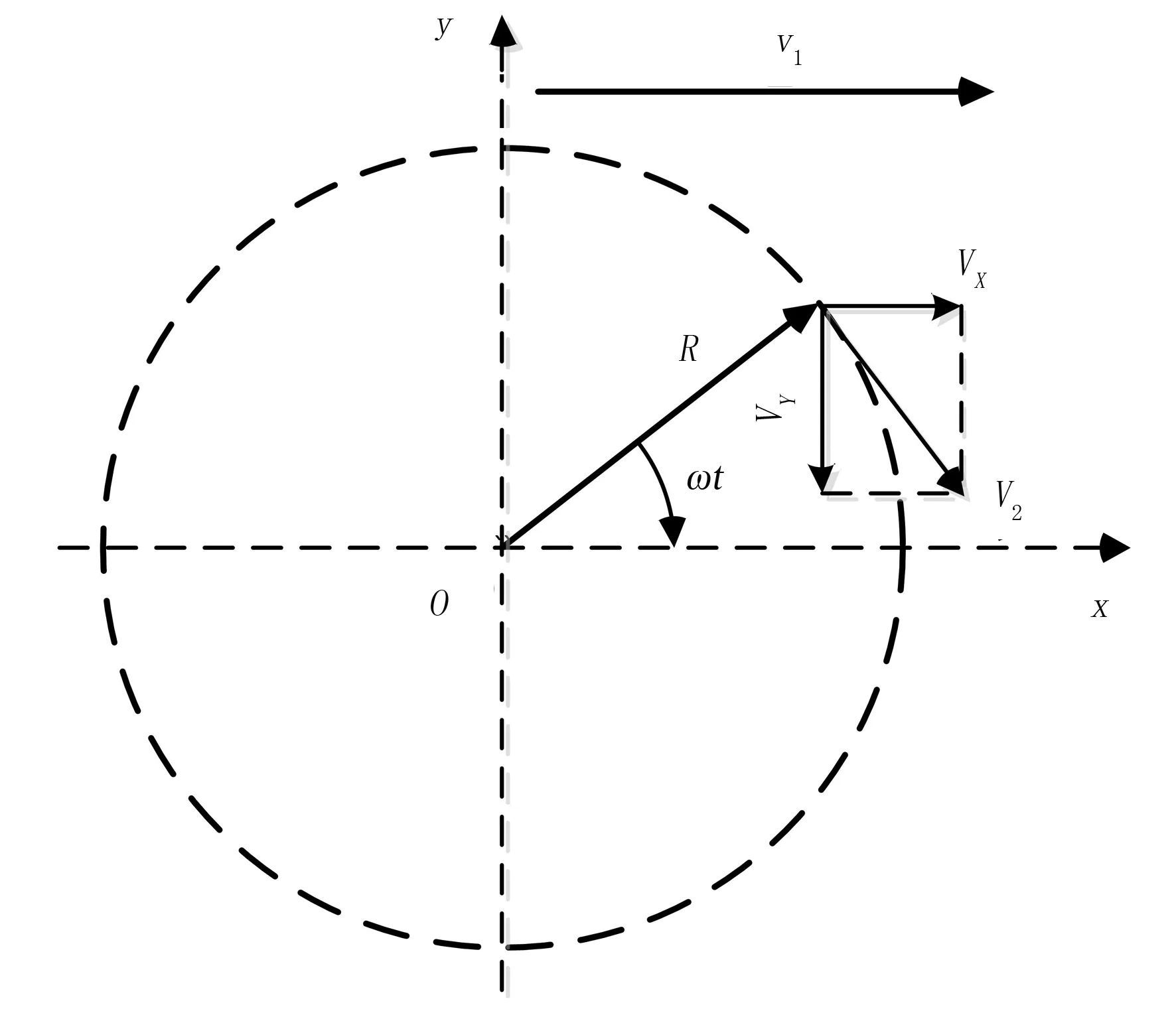
图5 刀片尖端运动分析图Fig.5 Motion analysis diagram of the tip of the blade

图6 刀片尖端轨迹线Fig.6 The trajectory of the tip of blade
在仿真中设置机具前进速度为0.833m/s,粉碎刀的转速为1 200r/min,刀片尖端的轨迹线为余摆线,刀具的进距(相邻旋转周期的中心距)为85mm,小于甘薯株距(200mm),保证了该刀具不会出现漏切的情况。
2.2 立式滚筒拨禾机构
为了避免喂入甘薯秧蔓时堵塞拨禾齿,查阅相关文献资料,并参考青贮饲料收获机的拨禾形式,设计了立式滚筒拨禾机构,解决了秧蔓缠绕拨禾齿的问题。其工作原理,如图7所示。
该机构由立式滚筒、行星齿轮机构(传动作用即带动立式滚筒转动)及平面盘形沟槽凸轮机构(在滚筒内分3层布置)组成。其中,3层凸轮机构中的凸轮固定于立式滚筒之中,立式滚筒的转动带动凸轮从动杆件(拨禾齿)沿凸轮沟槽运动同时从动杆件在立式 滚筒里做伸缩运动。
立式滚筒拨禾机构结构图,如图8所示。
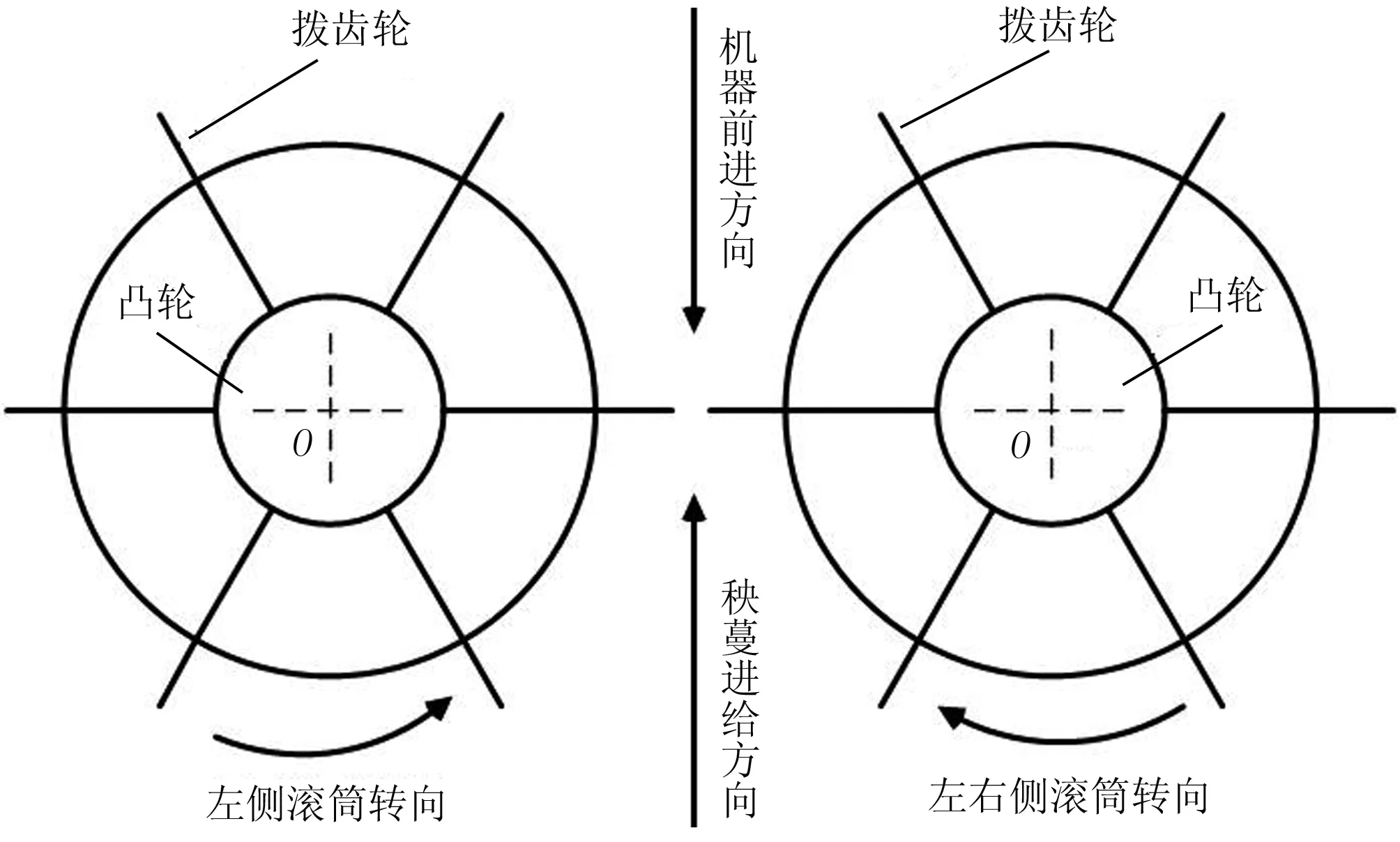
图7 工作原理图Fig.7 The working principle diagram

1.齿圈 2.凸轮 3.拨禾齿 4.太阳轮 5.行星轮 6.立式滚筒 7.传动轴 8.行星齿轮支架 9.滚筒底座 图8 立式滚筒拨禾机构结构图Fig.8 Structure diagram of vertical roller pulling mechanism
凸轮机构是该机构的核心部件,根据本机的工作要求,选取从动件的运动规律为5次多项式,适用于高速、轻载。该凸轮机构的设计参数,如表1所示。
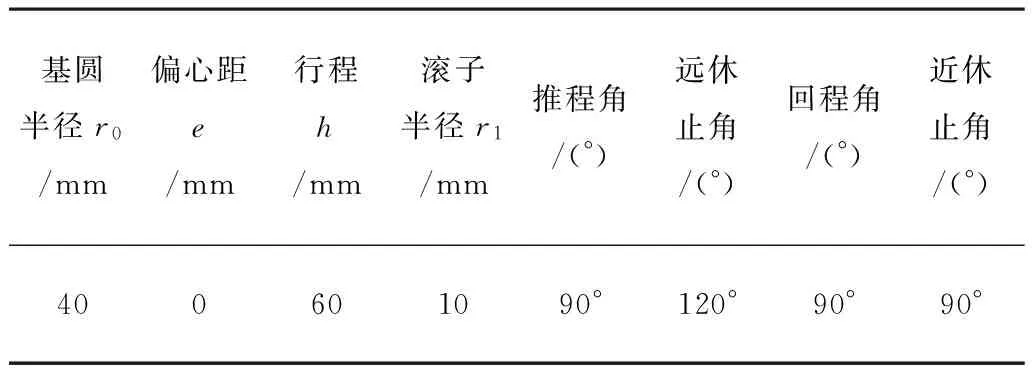
表1 凸轮机构基本参数Table 1 Basic parameters of cam mechanism
运用Adams对该机构进行仿真(设置的转速为1 200r/min,机器的前进速度为0.833m/s),得到从动杆件(拨禾齿)的质心的位移、速度、加速度曲线,如图9所示。根据曲线图,可以得到该机构在启动瞬间振动较强,运行期间有轻微振动,整体结构满足需求。
2.3 挑秧杆
挑秧杆将贴在地面上的甘薯藤蔓挑离地面,是实现藤蔓处理效果的基础。本设计由上板(等腰梯形)、底板、弹簧、固定杆及销轴组成,底板安装位置与地面平行,上板和下板呈22°(可调),整体结构如图10所示。

图9 立式滚筒拨禾机构仿真曲线图Fig.9 Simulation curve of vertical roller pulling mechanism

1.上板 2.固定杆 3.底板 4.弹簧 图10 整体结构图Fig.10 The overall structure diagram
3 田间试验
3.1 试验基本条件
田间性能试验在山东农业大学南校区甘薯试验田进行。试验土壤为壤土,土壤含水率为15%,粘度适中;试验地平整,垄型规范,覆土严实,能够满足试验要求。试验甘薯品种为宁紫2号,在其收获期第14天进行,茎秆含水率为81.5%,平均藤蔓茎秆直径为6.2mm。
3.2 试验结果
在整机行进速度为3km/h的情况下,进行单垄单行处理作业试验,主要对留茬高度、除净率、生产率、伤薯率4个技术指标进行测试。测试结果如表2所示。

表2 整机性能测试结果Table 2 Test results of the whole machine
3.3 结果分析
从履带式小型甘薯秧蔓处理机试验性能结果可以看出:平均留茬高度为72.4mm,根据以往经验留茬高度应不低于70mm为宜,所以该机满足农艺要求;除净率为92.3%,满足技术指标;生产率满足对甘薯收货效率的要求;伤薯率为6.9%,能够保证甘薯的收货质量,保护了农民的利益。
4 结论
1)理论分析与试验表明:研制的履带式小型甘薯秧蔓处理机能顺利完成甘薯秧蔓的处理作业,各项作业指标满足设计要求,满足秧蔓处理的农艺要求,为甘薯秧蔓处理作业提供了一种新机型。
2)设计了挑秧装置、粉碎装置、秧蔓喂入装置;对粉碎刀片尖端的轨迹进行了分析,能够保证粉碎刀片不漏切藤蔓,保证良好的效果;首次采用立式滚筒拨禾机构,实现了对秧蔓的无堵塞喂入,解决了秧蔓缠绕的拨禾齿的问题。
3)试验过程中发现:立式滚筒拨禾机构有轻微的振动,尤其是在启动时振动强烈。这一问题需要进一步对该机构进行优化设计,以保证机器的寿命。
[1] 马标,胡良龙,许良元,等.国内甘薯种植及生产机械[J].中国农机化学报,2013,34(1):42-46.
[2] 马大夫,邱军.国家甘薯区试考察与产业发展建议[J].杂粮作物,2004,24(5):306-308.
[3] 刘庆昌.甘薯在我国粮食和能源安全中的重要作用[J].科技导报,2004(9):21-22.
[4] 马大夫.世界甘薯生产现状和发展预测[J].世界农业,2001(1):17-19.
[5] 徐锡晨.履带式小型甘蔗收割机底盘和钢架设计与分析[D].南宁:广西大学,2006:17-21.
[6] 何玉静,杨钊星,孙卫平.甘薯秧茎切碎还田机的设计与实验[J].河南农业大学学报,2009,43(6):639-641.
[7] 涂建平,徐雪红,夏中义,等.棉杆粉碎还田机刀具优化排列的研究[J].农机化研究,2003(2):102-104.
猜你喜欢
科学技术创新(2022年24期)2022-08-06
护理实践与研究(2021年6期)2021-04-22
数学小灵通·3-4年级(2020年3期)2020-06-24
制造技术与机床(2019年8期)2019-09-03
阅读与作文(英语高中版)(2019年8期)2019-08-27
科技视界(2018年21期)2018-12-10
科学中国人(2018年8期)2018-07-23
琴童(2017年3期)2017-04-05
优雅(2016年9期)2016-09-06
智慧与创想(2013年6期)2013-08-27
