
乘坐式履带耕整机试验分析
2018-03-28 00:49王圆明宋树民湛小梅刘汶树李亚丽崔晋波
农机化研究 2018年3期
王圆明,宋树民,湛小梅,刘汶树,李亚丽,崔晋波
(重庆市农业科学院 农业机械研究所,重庆 401329)
0 引言
目前,国内市场上耕作平台有微耕机[1-3](功率不大于7.5kW)和拖拉机[4-6](功率大于30kW)。微耕机是意大利Benassi公司于20世纪90年代末研发制造的以小型柴油机或汽油机为动力的农业机械,1997年被引入国内,在国内得到改进以适应国内复杂的地理地貌,特别是山地丘陵地区。2001年左右,国内微耕机市场蓬勃发展,进入微耕机大发展时代,涌现了以重庆为主要设计、生产、销售一体化产业链基地。拖拉机在国内北方地区形成了很好的产业链,为推进我国平原地区平整地机械化贡献了极大的智慧。
随着国内经济发展,劳动力短缺,微耕机的“解放了牛,累死了人”缺点愈发突出,并称为“耕腿机”“咬人机”[7-9]。拖拉机由于其自身质量和轮式结构,不能满足南方丘陵山地水田作业需求。与此同时,2010年之后微耕机行业开始面临亏损,大量企业寻找突破未果从而转型,因此微耕机的升级换代势在必行。本文将介绍自主研发的乘坐式耕整机,具有劳动强度低、作业效率高、田间适应性强及一机多用的特点,主要通过试验对乘坐式履带耕整机的关键指标耕深[10-14]、碎土率[10-14]和耕后平整度[10-14]进行检验。
1 整体结构及工作原理
1.1 整体结构
耕整机采用平履带结构形式、皮带张紧离合控制输出、三点悬挂式机具挂接和液压升降。耕整机主要由机架、行走离合手柄、耕作离合手柄、双缸发动机、可调座椅、耕作升降控制手柄、三点悬挂、旋耕机具、耕作离合传动、行走离合传动和履带底盘组成,其布局如图1所示,性能参数如表1所示。其中,为了减轻整机质量和增加经济性,旋耕机具采用侧面链传动方式。
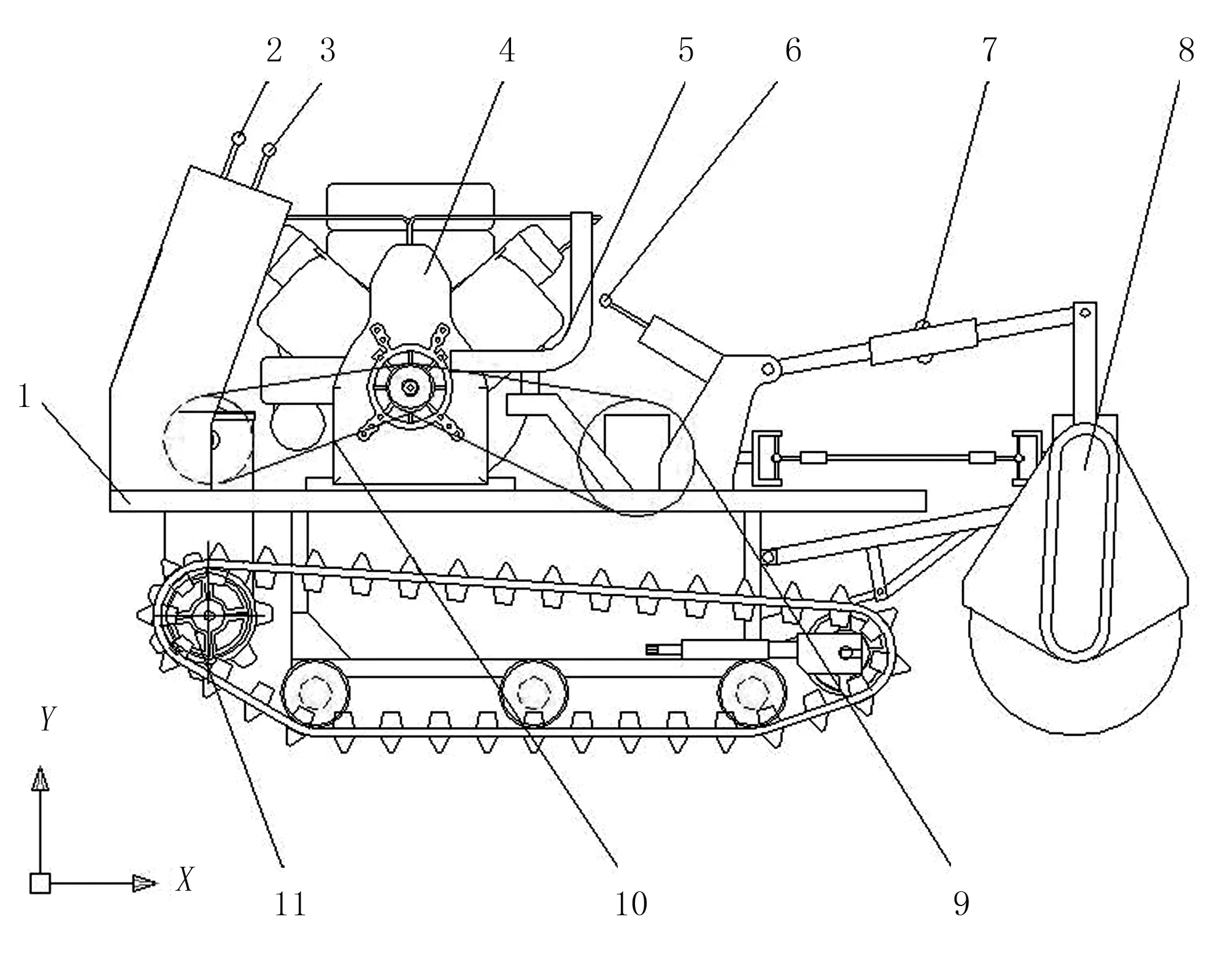
1.机架 2.行走离合手柄 3.耕作离合手柄 4.双缸发动机 5.可调座椅 6.耕作升降控制手柄 7.三点悬挂 8.旋耕机具 9.耕作离合传动 10.行走离合传动 11.履带底盘 图1 乘坐式履带耕整机Fig.1 The riding type crawler tillage machine
1.2 工作原理
耕整机设有行走离合和耕作离合实现行走与耕作分离。耕作机选用3+1档位变速箱(3个前进挡+1个后退挡),满足对旱地耕作、水田耕作与行走效率的要求。操作行走离合和变速箱实现耕作机的前进与后退。操作耕作离合使得旋耕离合传动的皮带张紧带动耕作机具旋转实现耕地,同时与耕作升降控制手柄配合操作完成机具的升降。

表1 乘坐式履带耕整机性能参数Table 1 Performance parameter of the riding type crawler tillage machine
2 试验
试验主要根据耕整机的耕深、碎土率及耕后平整度3个方面判定其性能。本次试验在重庆进行,所选土块为再生稻,倒茬高25~40cm,土壤含水率20%,按普氏土壤分类表其硬度1.1。
2.1 耕深测定
根据耕整机的测定标准[14],制定耕深测定方法,沿耕整机前进方向,每隔2m左、右两侧各测定一个点并记录,并测试耕深,计算耕深平均值,即
(1)
式中di—第i个行程的耕深平均值(cm);
dij—第i个行程中的第j个行程的耕深值(cm);
ni—第i个行程中的测定点数。
耕深标准差、变异系数和稳定系数为
(2)
(3)
Ui=1-Vi
(4)
式中Si—第i个行程的耕深标准差(cm);
Vi—第i个行程的耕深变异系数;
Ui—第i个行程的耕深稳定性。
第1个工况:Ⅰ挡行走速度0.43km/h,纯工作效率0.054hm2/h,其原始测量数据见表2,并进行数据分析整理。

表2 第1个工况耕深Table 2 The depth of the first condition cm
Ui=1-Vi=95.39%
第2个工况:Ⅱ挡行走速度0.92km/h, 纯工作效率0.115hm2/h,其原始测量数据见表3,并进行数据分析整理。

表3 第2个工况耕深Table 3 The depth of the second condition cm
Ui=1-Vi=94.25%
由试验可以清晰地看到:不管是Ⅰ挡还是Ⅱ挡耕深都远远超出了15cm,满足大部分农作物对整地的要求。但由于旋耕机具采用的侧面传动,传动侧耕深始终比非传动侧深1.9~2.5cm,这是由于耕作机具侧面传动不可避免的劣势。
2.2 碎土率
农艺上对碎土率要求是高于85%,根据耕整机的碎土率测定标准,制定其测定方法,在已耕地上测定0.5m×0.5m面积内的全耕层土块,以最大边长lmax<4cm的土块质量占其总质量的百分比,每个行程测定一个点,并记录。第1个工况:Ⅰ挡行走速度0.43km/h,纯工作效率0.054hm2/h,其原始测量数据如表4所示;第2个工况:Ⅱ挡行走速度0.92km/h, 纯工作效率0.115hm2/h,其原始测量数据如表5所示。
由表4和表5可知:Ⅰ挡由于行走速度慢,其碎土效果明显优于Ⅱ挡;耕整机的碎土率稳定在90%以上,满足农作物对碎土率的要求。

表4 第1个工况碎土率Table 4 The rate of broken soil of the first condition /cm

表5 第2个工况碎土率Table 5 The rate of broken soil of the first condition /cm
2.3 耕后平整度
农艺上对耕后平整度旱地落差不超过8cm,水田落差不超过5cm。根据耕整机的耕后平整度测定标准,制定其测定方法,延垂直于机组前进方向,在地表最高点取一水平基准线,在1个行程上取与耕宽一致的宽度,分成10等分,每个行程取3个测定,并记录原始数据。第1个工况:Ⅰ挡行走速度0.43km/h,纯工作效率0.054hm2/h,其原始测量数据如表6所示;第2个工况:Ⅱ挡行走速度0.92km/h, 纯工作效率0.115hm2/h,其原始测量数据如表7所示。

表6 耕后平整度Table 6 The flatness after ploughing of the first condition cm

表7 耕后平整度Table 7 The flatness after ploughing of the first condition cm
由表6和表7求得在第1工况下,耕后平整度均值为2.70cm,标准差为0.385;在第二工况下耕后平整度均值为3.74cm,标准差为0.513。由此可知:耕后平整度旱地落差均不超过5cm,满足农艺要求;Ⅰ挡由于行走速度慢,其平整度效果明显优于Ⅱ挡。
3 结论
1)耕整机动力匹配合理,操作简便符合人机工程。
2)耕深、碎土率和耕后平整度均满足多数农作物种植的农艺要求。
3)在耕作黏度大的旱地使用Ⅰ挡进行耕作效果更为佳;对于水田使用Ⅱ挡,即可满足农艺上的要求也可以提高耕作效率,经济性好。
[1] 曾晨,李兵,李尚庆,等.1WG-63型微耕机的设计与实验研究[J].农机化研究,2016,39(1):132-137.
[2] 杨学军,韩涛,白玉成,等.我国微耕机发展现状及发展趋势[J].农业机械,2002(7):20-22.
[3] 李志红,包长春,李锦泽,等.我国微型耕作机发展状况的研究[J].农机化研究,2008(9):215-217.
[4] 赵剡水,杨为民.农业拖拉机技术发展观察[J].农业机械学报,2010,41(6):42-48.
[5] 陆根源,凌桐森,卢振洲,等.国外大马力拖拉机发展状况[C]//大马力拖拉机机配套农具学术讨论会论文选登,1994-2016:1-10.
[6] 赵真,王帅.国内外拖拉机发展现状及趋势[J].农业科技与装备,2012(12):81-82.
[7] 陈建,陈川,陈洪.西南地区微耕机面临的三大新挑战及对策探讨[J].农机化研究,2012,34(5):245-248.
[8] 鄢晓娟.微耕机安全事故预防[J].四川农业与农机,2012(5):35.
[9] 畅雄勃.微耕机安全生产问题和建议[J].农机化研究,2015,37(9):254-258.
[10] GB10395.10-2006,农林拖拉机和机械安全技术要求第10部分:手扶(微型)耕耘机[S].北京:中国标准出版社,2006.
[11] JB/T10266-2013,微型耕耘机[S].北京:机械工业出版社,2013.
[12] NY2189-2012,微耕机安全技术要求[S].北京:中国农业出版社,2006.
[13] DG/T006-2012,微耕机[S].北京:中国农业出版社,2012.
[14] GB/T5668-2008,旋耕机[S].北京:中国标准出版社,2012.
猜你喜欢
农业技术与装备(2022年3期)2022-05-31
山东农机化(2022年1期)2022-03-05
湖北农机化(2021年14期)2021-12-07
腐植酸(2021年2期)2021-12-04
中国土壤与肥料(2021年5期)2021-12-02
装备制造技术(2020年11期)2021-01-26
新农民(2020年34期)2020-12-17
农民致富之友(2019年10期)2019-05-22
电子制作(2018年11期)2018-08-04
农民致富之友(2018年11期)2018-06-28
