
一种机载重轨InSAR频域动态子孔径运动补偿方法
2018-04-11 02:29李银伟陈立福吴冬梅
西安科技大学学报 2018年2期
王 静,李银伟,彭 青,陈立福,吴冬梅
(1.西安科技大学 通信与信息工程学院,陕西 西安710054;2.上海无线电设备研究所,上海 200090;3.长沙理工大学 电气与信息工程学院,湖南 长沙 410004)
0 引 言
干涉SAR(Interferometric Synthetic Aperture Radar,InSAR)是利用两天线与目标点的相位差来获取数字高程模型(Digital Elevation Model,DEM)[1]。为了确保DEM的反演精度,获取地物目标的精确相位是关键。由于受到大气湍流或人为控制的影响,机载干涉SAR天线相位中心(Antenna Phase Center,APC)总是偏离理想的匀速直线运动状态,而实际成像时都是假设APC作匀速直线运动。因此,在机载InSAR成像必须进行精确的运动补偿处理。
总的来说,运动补偿有2种方法:基于IMU/DGPS测量数据的补偿方法和基于SAR原始回波数据的补偿方法。后者是直接从SAR回波数据中估计运动误差,其相位保持性较差,不适合干涉处理。基于IMU/DGPS测量数据进行补偿的精度主要受限于3个因素:IMU/DGPS的测量精度、地物的定位精度和运动补偿算法。现有的IMU/DGPS测量装置对天线沿着载机平台航迹的定位精度在1~10 cm;系统延时误差、多普勒中心频率误差和参考DEM误差导致地物的定位误差;在传统的二级运动补偿中存在波束中心近似,使得经过传统二级运动补偿的回波数据中仍存在残余运动误差。
在成像中,常数的残余运动误差会导致相位偏置,线性残余运动误差会引起脉冲响应(Impulse Response,IR)的移位,二阶残余运动误差会引起图像散焦,更高阶的残余运动误差进一步影响IR的质量[2]。而这些对各个图像的影响最终会对干涉相位产生不可忽略的影响。对于机载双天线InSAR系统来说,2幅图像中的残余运动误差是相关的[3],在干涉相位产生时残余运动误差几乎可以完全抵消。而重轨InSAR系统每次飞行过程中的残余运动误差是独立的,由此引入了未知的时变基线误差。在生成干涉纹图时残余运动误差无法抵消,因此必须采用合适的方法进行残余运动误差补偿。
对于方位向空变和地形依赖误差的补偿问题,文献[4]提出了时域子孔径运动补偿算法。文献[5]提出了图像域子孔径运动补偿算法。文献[6]提出了频域子孔径运动补偿算法。文献[7]从性能和计算复杂度2个方面对上述算法进行了比较。文献[8]针对频域子孔径的缺陷提出了一些改进措施。但这些算法都是以达到残余误差对图像质量的影响可以忽略为目的。而在干涉SAR运动补偿中,不仅要关注图像质量的好坏,更要关注相位的精确性。基于以上原因,机载重轨InSAR运动补偿与双天线InSAR运动补偿相比更加复杂。针对常规二级运动补偿中的波束中心近似和地物定位中的平地假设2个问题,文中提出了考虑外部DEM的频域动态子孔径运动补偿方法,并在考虑残余运动误差补偿、射频干扰抑制及成像算法选取后,给出了机载重轨InSAR的数据处理流程,以获得精确的InSAR图像和干涉相位。通过对机载P波段重轨InSAR数据的处理及DEM反演,验证了该处理流程的有效性。
1 机载重轨InSAR运动补偿
1.1 参考轨迹
运动补偿是指对回波数据进行误差校正使得APC等效于沿参考轨迹作匀速直线运动。在SAR运动补偿中,一般是对IMU/DGPS的测量数据进行拟合以获得参考轨迹。对于重轨InSAR来说,2次飞行航迹相互独立,分别进行拟合后得到2条非平行的参考航迹,直接运动补偿和成像会影响其相干性。因此,在运动轨迹拟合时以2次航迹航向的平均值作为参考航迹的航向来获得2条相互平行的参考航迹。
1.2 方位向重采样
APC非匀速运动会影响回波多普勒信号的调频斜率,同时造成回波信号的方位向非均匀采样。一方面可通过实时调整发射脉冲重复频率来消除非匀速的影响,但硬件实现比较复杂;另一方面可以对回波信号进行方位向重采样来调整采样间隔,实现比较简单。由于2次飞行速度不一致,其均匀采样间隔不同。为减少成像处理后的配准过程,在重采样时使用相同的采样间隔Δx.
Δx=(Δx1+Δx2)/2
(1)
式中Δx1,Δx2分别为2次飞行时的均匀采样间隔,s.
1.3 传统的两级运动补偿
APC的非直线运动一方面改变了与目标之间的距离,使得回波信号到达接收天线的时间延迟引起变化,从而改变回波信号在信号空间中的分布,即轨迹误差;另一方面造成目标的相位历程发生改变,即相位误差。因此,运动补偿应同时对轨迹误差和相位误差进行补偿[3]。
常用的误差补偿方案是将误差补偿分解为2个阶段:初级运动补偿和次级运动补偿。在两阶段中都首先根据雷达视线向的运动误差进行相位误差补偿,然后对回波信号进行距离向重采样实现轨迹误差的补偿。两级运动补偿时的相位补偿φ1(x′)和φ2(x′)分别为
(2)
(3)
式中Δr(x′,r0)和Δr(x′,r)分别是最近斜距为r0(参考斜距)和r处目标与APC之间在雷达视线向的运动误差,m.
1.4 频域动态子孔径运动补偿
传统的二级运动补偿中,存在波束中心近似。即运动补偿时同一天线波束覆盖范围内所有地物目标都以波束中心处目标的视线向运动误差进行补偿,如图1所示。其中r是目标P0(x′,r)对理想轨迹的最近斜距,Δr(x′,r)是两级运动补偿时补偿的运动误差。对于斜视角为θsq,相对于理想轨迹的最近斜距为r的点目标P(x,r),ΔR(x,x′,r)为其视线向运动误差。由于波束中心近似,在成像过程中实际补偿的误差为Δr(x′,r),两者差异导致的相位误差为
(4)
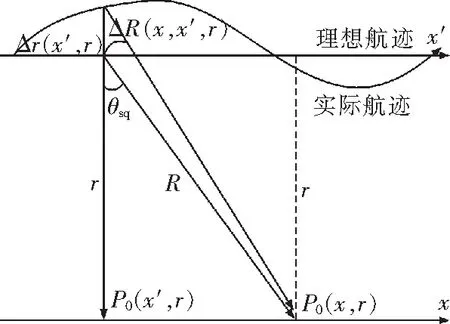
图1 正侧视下方位向空变运动误差Fig.1 Motion error of azimuth space-variant in side-viewinging
当机载双天线InSAR系统工作在X和C波段时,其方位向波束角较小(3°~5°),相位误差较小,因此在双天线InSAR中可不作考虑。而对于工作在P或L波段的重轨InSAR系统,其方位向波束角较大,通常在十几到几十度,残留相位误差较大。另外,在地物定位时存在成像区域是平地的假设,目标的实际高程与参考高程存在差异时会在图像中引起相位误差。因此以上2方面误差都必须设法补偿。
利用考虑外部DEM的子孔径方法[4]可以对以上相位误差进行补偿。由于子孔径分割域不同,可分为时域子孔径算法(SATA)、图像域子孔径算法(PTA)和频域子孔径算法(FD),其依据都是时(角)频对应关系
(5)
其中θi为子孔径中心对应的斜视角,(°);fdc,i为对应的多普勒中心频率,Hz.
SATA计算效率高,但精度低;PTA精度高,但计算效率低,而FD算法介于二者之间,因此文中主要考虑FD算法。频域子孔径算法存在2个不足:一是子孔径均匀分割,没有考虑到相位误差随方位向频率的非线性变化,使得子孔径间的相位跳变不固定;二是子孔径运动补偿时将对应子孔径外信号补零至原始长度,导致信号的时间-带宽积变小,影响算法依赖的角频对应关系。针对以上不足,特提出频域动态子孔径算法对其进行改进
1)考虑相位误差随方位向频率的非线性变化,进行动态的子孔径划分。对于处理时间内的最大视线向运动误差,利用式(4)和式(5)计算相位误差随方位向频率的变化;以多普勒中心频率开始,当相位误差变化量达到某一阈值时进行1次子孔径分割;最后将子孔径中心频率fdc,i按式(5)变为对应的子孔径中心斜视角θi.其中,阈值越小,子孔径分割越精细,补偿越精确;
2)进行子孔径运动补偿时,对整个频域信号进行方位向IFFT变换到时域,按式(4)所示进行运动补偿,然后对补偿后信号进行FFT变换,在多普勒频域选取对应的子孔径数据。
同时,在进行频域动态子孔径运动补偿时,采用外部DEM来补偿平地假设引起的相位误差。
1.5 残余运动误差补偿
传统二级运动补偿和考虑外部DEM的动态频域子孔径运动补偿都假设IMU/DGPS测量值就是APC的真实位置。而由导航设备精度的限制引起APC的残余误差会在SAR图像中产生几何位移和相位误差。重轨InSAR在2次飞行过程中的残余运动是独立的,由此引入未知的时变基线误差,生成干涉纹图时无法像双天线InSAR系统那样能够相互抵消。因此,在利用机载重轨InSAR进行DEM反演时,必须补偿该残余运动误差。目前,有关残余误差补偿的方法主要分为2类:一类是通过子孔径干涉的方法估计2幅重轨SAR图像残余运动的差异,将估计的结果补偿到一幅图像上或者2幅图像各补偿一部分,如多斜视方法[5](Multisquint technique,MS);另一类是分别估计和补偿每幅SAR图像的残余运动,如改进的相位曲率自聚焦方法[6](Weighted Phase Curvature Autofocus,WPCA)和基于点目标的多斜视方法[7](Multisquint Technique with Point Targets,MTPT)。3种方法各有优缺点,文中在重轨InSAR数据处理流程时选用MS方法。
2 机载重轨InSAR处理流程
P波段的电磁频率约在300 MHz~1 GHz之间,而此范围内的很多频段已被电视、广播以及移动通讯等其它民用网络覆盖。因此工作在P波段的SAR容易受到其它射频信号的干扰(Radio Frequency Interference,RFI)。对于重轨InSAR来说,RFI的存在不仅影响SAR图像的聚焦质量,还导致干涉相位出现误差,进而影响DEM的反演精度。Reigber A等提出了频域陷波滤波的方法抑制RFI,即将幅度超过某一阈值的频谱置零[8]。该方法实现简单,对相位的影响不明显,但对强RFI区域难以达到满意的抑制效果。Lord R T等提出了基于最小均方误差[9](Least-Mean-Squared,LMS)来构建自适应的FIR滤波器来滤除RFI。此方法适用于任何环境和系统,无需RFI信号的先验知识。文中选择使用LMS方法来进行重轨InSAR的RFI。
在双天线InSAR成像中,一般选取具有自配准功能的CS算法。但CS算法所做的近似在大孔径、大斜视角的条件下不再成立[3]。因此,CS算法不再适用于P波段SAR成像。而ωK[10]成像算法在二维频域通过Stolt插值来校正距离、方位耦合与距离频率、方位频率间的依赖关系,是更为精确的SAR成像算法。它可实现宽孔径、大斜视角下的聚焦处理。因此,文中选择ωK算法。
另外,2幅图像的多普勒中心频率不一样,而为降低多普勒去相干,在进行成像时选择共同的多普勒中心频率fdc,即
fdc=min(fdc1,fdc2)
(6)
式中fdc1,fdc2分别为2次飞行时的多普勒中心频率,Hz.
综合以上所述,可得到机载P波段重轨InSAR反演DEM的整个数据处理流程,如图2所示。

图2 机载P波段重轨InSAR反演DEM流程Fig.2 Processing chain of DEM inversion for Airborne P-band repeat-pass InSAR system
3 实验结果与分析
采用波数域成像算法进行成像时,分别采用以下3种方法进行运动补偿。方法一:传统补偿方法,即初、次2级运动补偿;方法二:频域子孔径算法(FD算法);方法三:文中提出的频域动态子孔径算法。采用3种不同的运动补偿方法进行运动补偿时获得的相干系数的直方图如图3所示。对相干系数在不同区间的统计结果见表1.
从图3可以直观看出,与其他2种方法相比,文中提出的频域动态子孔径算法在相干系数 区间的个数明显多于其他2种方法。从表1的统计结果可知,文中方法约是传统方法的2倍,是FD算法的1.5倍。此外,3种方法补偿的情况下在不同区间的相关系数的统计结果表明,文中方法都要优于其他2种方法。此外,得到的相干系数均值分别为0.479 2,0.572 6和 0.642 3,文中算法对FD算法缺陷的改进是非常有效果的。

图3 3种运动补偿方法下相干系数的统计直方图Fig.3 Histogram of coherence for three motion compensation methods

表1 3种方法相干系数统计
另一方面,利用实际的重轨InSAR 数据来验证上述数据处理流程的有效性是必不可少的。文中采用中国科学院电子学研究所研制的机载P波段全极化SAR系统于2010年11月在山西某地获取的重轨干涉数据进行处理。该系统搭载在中国科学院“奖状”飞机上,同时搭载了X波段HH极化双天线InSAR系统。机上安装了2套导航定位系统:POS AV 510和北京航空航天大学研制的导
航系统。机载SAR的系统参数和处理数据的参数见表2.

表2 机载P波段SAR数据的系统参数
在该区域中,沿距离向布置了12个P波段角反射器(图4(a)中方框区域)。利用这些角反射器可在反演DEM时对干涉参数(基线长度、基线倾角和干涉相位偏置)进行定标[11]。按照图2所示的数据处理流程进行处理,其中外部DEM由机上搭载的双天线InSAR系统提供。图4(a)和图4(b)分别给出了幅度图和干涉处理得到的干涉纹图。对干涉相位进行解缠,利用定标后的干涉参数进行DEM反演,生成3维视图的结果如图4(c)所示。从图4可以知道,该处理流程能够获得聚焦良好的SAR图像和干涉纹图,同时能够反演得到DEM,至于DEM精度则有待进一步研究。

图4 数据处理结果Fig.4 Data processing results
4 结 论
采用常用的子孔径运动补偿方法对方位向空变和地形依赖误差进行补偿后,其补偿的效果并不能达到InSAR对相位精确性的要求。针对上述问题,文中首先分析了现有方法在InSAR运动补偿中的不足之处。其次在频域子孔径运动补偿方法的基础上,针对波束中心近似和平地假设2个问题,提出了考虑外部DEM的频域动态子孔径运动补偿方法。最后根据机载重轨InSAR的特点,对现有的残余运动误差补偿、射频干扰抑制及成像算法进行分析比较,详细给出了适合机载P波段重轨InSAR反演DEM的处理流程。仿真和实际飞行数据处理结果均表明,该方法较好地实现了机载P波段重轨InSAR的运动补偿,也进一步验证整个反演DEM流程的有效性。
参考文献(References):
[1]Rosen P A,Hensley S,Joughin I R,et al.Synthetic aperture radar interferometry[J].Proceedings of the IEEE,2000,88(3):333-382.
[2]Stevens D R,Cumming I G,Gray A L.Options for airborne interferometric SAR motion compensation[J].IEEE Transactions on Geoscience and Remote Sensing,1995,33(2):409-420.
[3]Davidson G W,Cumming I G,Ito M R.A chirp scaling approach for processing squint mode SAR data[J].IEEE Transations on Arospace and Electronic Systems,1996,32(1):121-133.
[4]Prats P,Reigber A,Mallorqui J.Topography-dependent motion compensation for repeat-pass interferometric SAR systems[J].IEEE Geosciences and Remote Sensing Letters,2005,2(2):206-210.
[5]Macedo K A C de,Scheiber R.Precise topography and aperture-dependent motion compensation for airborne SAR[J].IEEE Geosciences and Remote Sensing Letters,2005,2(2):172-176.
[6]Zheng X,Yu W,Li Z.A novel algorithm for wide beam SAR motion compensation based on frequency division[C]//In Proc.IGARSS’06,Denver,Co,2006(4):3160-3163.
[7]Prats P,Macedo K A C de,Reigber A,et al.Comparison of topography and aperturedependent motion compensation algorithms for airborne SAR[J].IEEE Geoscience and Remote Sensing Letters,2007,4(3):349-353.
[8]Li Y L,Liang X D,Ding C B,et al.Improvements to the frequency division-based subaperture algorithm for motion compensation in wide-beam SAR[J].IEEE Geoscience and Remote Sensing Letters,2013,10(5):1219-1223.
[9]Reigber A,Prats P,Mallorqui J.Refined estimation of time-varying baseline errors in airborne SAR interferometry[J].IEEE Geoscience and Remote Sensing Letters,2006,3(1):145-149.
[10]Macedo K A C de,Scheiber R,Moreira A.An autofocus approach for residual motion errors with application to airborne repeat-pass SAR interferometry[J].IEEE Transactions on Geoscience and Remote Sensing,2008,46(10):3151-3162.
[11]ZHONG Xue-lian,GUO Hua-dong,XIANG Mao-sheng,et al.Residual motion estimation with point targets and its application to airborne repeat-pass SAR interferometry[J].International Journal of Remote Sensing,2012,33(2):762-780.
[12]Buckreuss S,Horn R.E-SAR P-band SAR subsystem design and RF-interference suppression[C]//in Proc.IGARSS’98,Seattle,WA,USA,1998:466-468.
[13]Bamler R.A comparison of range-Doppler and wavenumber domain SAR focusing algorithms[J].IEEE Transactions on Geoscience and Remote Sensing,1992,30(4):706-713.
[14]Fornaro G,Franceschetti G,Perna S.On center-beam approximation in SAR motion compensation[J].IEEE Geosciences and Remote Sensing Letters,2006,3(2):276-280.
[15]Mao Y,Xiang M,Wei L,et al.Error analysis of SAR motion compensation[C]//In 2012 IEEE International Conference on Imaging Systems and Techniques,Manchester,United kingdom,2012:377-380.
[16]Hensley S,Chapin E,Freedman A,et al.First P-Band results using the GeoSAR mapping system[C]//In:2001 IEEE Proceedings of IGARSS’01,Sydney,Australia,2001:126-128.
[17]Zhong X,Xiang M,Yue H,et al.Algorithm on the estimation of residual motion errors in airborne SAR images[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(2):1311-1323.
[18]Zhong X,Guo H,Xiang M,et al.Residual motion estimation with point targets and its application to airborne repeat-pass SAR interferometry[J].International Journal of Remote Sensing,2012,33(2):762-780.
[19]毛永飞,向茂生. 基于加权最优化模型的机载InSAR联合定标算法[J].电子与信息学报,2011,33(12):2819-2824.
MAO Yong-fei,XIANG Mao-sheng.Joint calibration of airborne interferometric SAR data using weighted optimization method[J].Journal of Electronics and Information Technology,2011,33(12):2819-2824.
[20]李银伟,邓袁,向茂生. 波束中心近似对机载干涉SAR运动补偿的影响分析[J].电子与信息学报,2014,36(2):415-421.
LI Yin-wei, DENG Yuan,XIANG Mao-sheng.Effects of center-beam approximation on motion compensation for airborne interferometric SAR[J].Journal of Electronics and Information Technology,2014,36(2):415-421.
[21]Zhang L,Qiao Z,Xing M,et al.A robust motion compensation approach for UAV SAR imagery[J].IEEE Transactions on Geoscience Remote Sensing,2012,50(8):3202-3218.
猜你喜欢
中等数学(2022年5期)2022-08-29
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
成都信息工程大学学报(2021年1期)2021-07-22
中等数学(2020年2期)2020-08-24
雷达学报(2018年3期)2018-07-18
制造技术与机床(2017年11期)2017-12-18
北京航空航天大学学报(2017年3期)2017-11-23
CHINESE JOURNAL OF AERONAUTICS(2017年5期)2017-11-17
雷达学报(2017年1期)2017-05-17
