
基于隐马尔可夫模型与反向传播神经网络的运动型多功能汽车运动参数预测*
2018-04-16 08:35李智宏姚嘉凌
装备机械 2018年1期
□李智宏 □姚嘉凌 □汪 蕊
南京林业大学 汽车与交通工程学院 南京 210037
1 研究背景
侧翻是车辆最危险的事故之一,带来的后果极其严重,是道路交通安全的主要问题。与其它车辆相比,运动型多功能汽车(SUV)的行车环境相对复杂,且质心较高,行驶中极易发生侧翻事故。因此,如何提高SUV的防侧翻能力,保证行驶的安全性,已成为SUV研究的焦点问题。
车辆侧翻一般在较短时间内发生,侧翻前驾驶员感受不到车辆的侧倾状态,无法及时采取有效措施防止侧翻。因此,对车辆的运动状态进行预测,并判断可能会发生的侧翻,提前发出报警,可以有效防止侧翻发生,进而大大提高车辆行驶的安全性。近年来,隐马尔可夫模型(HMM)在预测系统状态的研究中得到了人们的重视,并有诸多研究成果。文献[1]针对无人驾驶车辆设计了一套行驶状态预测系统,采用HMM辨识车辆的行驶状态,预测驾驶员的驾驶行为。仿真表明,这一系统可以对无人驾驶车辆的未知决策做出实时准确的判断。文献[2]建立了一种基于HMM的车辆状态辨识系统,这一辨识系统通过实时计算和分析,采集车辆行驶影像记录数据,预测行驶车辆的纵向车速。文献[3]设计了一种基于HMM的车辆行驶状态辨识系统,通过采集车辆的侧向加速度数据来识别车辆的行驶状态,这一辨识系统还可以辨识制动、加速等驾驶状态。文献[4]在考虑驾驶员驾驶意图的基础上,构建了基于HMM的驾驶意图辨识模型,对驾驶员的意图有较高的辨识度,并具有一定的预警能力。文献[5]在重型车辆侧翻预警系统研究中,采用一种基于双层HMM的重型车辆行驶状态辨识方法,采集车辆横摆运动、转向运动、侧向运动等运动状态信息和车速信息,动态辨识重型车辆的行驶状态。仿真结果验证了这一方法的有效性。文献[6]提出了一种基于经验模态分解(EMD)与反向传播(BP)神经网络相结合的车辆关门声品质预测方法,以关门声信号特征作为输入,以主观评价值作为输出,采用神经网络进行训练,得到基于EMD的车辆关门声品质预测模型。结果表明,基于这一模型的预测数据更接近主观评价结果,具有较高的声品质预测精度。
笔者将HMM与BP神经网络相结合[7-8],应用马尔可夫预测算法对下一时间段SUV的行驶运动状态进行预测,用预测出的车辆运动状态作为BP神经网络模型的输入,预测车辆的具体运动参数,包括侧倾角、侧向加速度及方向盘转角等,可以使驾驶员能更加直观地观察车辆的倾斜程度,量化判断是否会发生侧翻,从而采取相应的措施防止车辆侧翻。另一方面,BP神经网络模型预测的参数还可以用于电子控制。
2 HMM建模及预测
笔者所建立的HMM是多维高斯HMM。模型的底层为可观测矢量序列,即当前的侧倾角和侧向加速度。模型的高层为不可观测的SUV运动状态,包括直线行驶状态、正常转向状态、紧急转向状态和侧倾行驶状态。如图1所示,Q为可观察矢量序列;a1j为转移概率,j=1,2,3,4;bij为观察概率,i=1,2,3,4。底层HMM进行统计学习和概率推理后,被输送至高层HMM,从而预测车辆未来的行驶状态,判断是否会发生侧翻。

图1 多维高斯HMM结构
首先要进行HMM学习,即确定HMM的相应参数。λ 为模型估计参数,λ=(t,A,C,μ,U),其中 t为初始状态分布,A为状态转移概率矩阵,C为混合权重矩阵,μ为均值矢量,U为协方差矩阵。
模型的可观测矢量序列 Q={q1,q2,…,qN},其中,qk为第k个观测矢量,k=1,2,…N,隐藏的状态序列O={o1,o2,…,oN}。
多维高斯HMM的可观测矢量序列Q由混合高斯概率密度函数bi(Q)产生:

式中:cij为系统混合高斯元的混合权重因数;μij为系统高斯密度函数的均值矢量。
确定模型估计参数 λ=(t,A,C,μ,U)中各元素时,将HMM工具箱加载到MATLAB工程数学软件中,编写.m文件程序,选用HMM的Baum-Welch算法,训练SUV运行状态的多维高斯HMM。训练后得到如下结果:

在对车辆在复杂工况下的行驶状态进行辨识的基础上,采用HMM对车辆运动状态进行预测仿真,预测仿真结果如图2所示。
3 BP神经网络

图2 HMM预测仿真结果
人工神经网络是一种运算模型,它从信息处理角度对人脑神经元网络进行抽象,建立一种简单模型,并按不同的连接方式组成不同的网络,是对人脑的简化和抽象。人工神经网络由于结构简单、自学习能力强,并具有良好的稳定性,因此广泛应用于预测估计、自动控制、模式识别等众多领域[9]。
BP神经网络是一种具有三层或三层以上无反馈的人工神经网络,其结构如图3所示[10]。BP神经网络通常由输入层、隐含层和输出层组成,各层神经元之间全部连接,外部数据变量输入到输入层,经过隐含层处理后,传递给输出层,由输出层输出数据处理结果。

图3 BP神经网络结构
BP神经网络在建模时要确定网络的结构和参数,使网络达到最优,从而提高整个网络的准确性和学习效率。隐含层的层数影响模型的训练速度,笔者选用具有三层结构的Sigmoid函数。在神经网络学习中,第p个样本的误差Ep为:

式中:ypi为第p个样本第i个单元的期望输出值为第p个样本第i个单元的实际输出值。
学习算法采用梯度下降法,沿误差变化的负梯度方向修正网络权值。调整权因数Wij,使误差Ep<ε,ε 为系统误差精度。
笔者选用BP神经网络建模,神经网络参数的选取对网络的训练结果有较大影响[11]。学习速率过大,容易导致网络不稳定;学习速率过小,则会导致收敛速度较慢。学习速率的取值范围为0.01~0.8,通过多次试验,确认取0.1较为合适。选择Tansig函数作为隐含层的处理函数,训练函数选用动量自适应学习速率梯度下降法,神经元的节点数为15,动量因子为0.95。
4 SUV运动参数预测
HMM能够预测SUV下一时间段的运动状态,从而判断是否会发生侧翻,但是不能预测出车辆下一时间段的具体运动参数,如方向盘转角、侧倾角和侧向加速度等。车辆下一时段的具体运动参数可使驾驶员量化判断是否会侧翻,也可为抗侧翻电子控制系统提供数据,因此对车辆运动参数进行预测很有必要。图4为HMM与BP神经网络结合流程框图。首先选用Carsim软件对车辆进行仿真试验,选择四种典型工况进行仿真,采集车辆在四种工况下的运动参数,包括侧向加速度、侧倾角等,作为HMM的数据输入。然后建立四种典型工况下的HMM,预测车辆下一时间段的运动状态。最后将HMM预测出的车辆运动状态作为BP神经网络的输入,从而预测出车辆下一时间段的具体运动参数。

图4 HMM与BP神经网络结合流程框图
选取斜坡转向和双移线转向进行SUV运动参数预测,分别验证方向盘转角在下一时间段的数据。在HMM预测到下一个时间段的车辆运动状态后,将当前运动参数和以往试验获得的下一时间段车辆运动参数作为BP神经网络的训练样本。
图5所示为斜坡转向时方向盘转角的试验数据。图6所示为斜坡转向时使用BP神经网络预测的方向盘转角数据和试验数据对比。图7所示为双移线转向时方向盘转角的试验数据。图8所示为双移线转向时使用BP神经网络预测的方向盘转角数据和试验数据的对比。由图6和图8可知,在斜坡转向和双移线转向时方向盘转角的预测数据和试验数据基本吻合,可见,将HMM和BP神经网络相结合,可以有效预测车辆在下一时间段的运动参数。

图5 斜坡转向时方向盘转角试验数据

图6 斜坡转向时方向盘转角数据对比
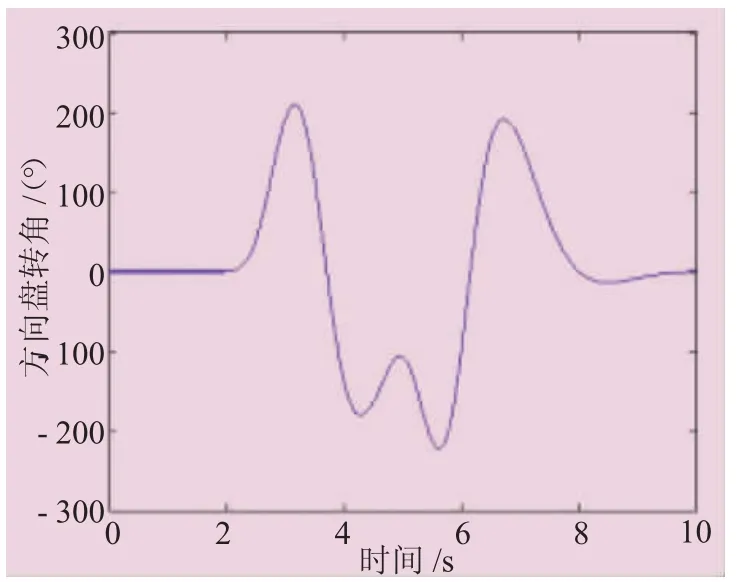
图7 双移线转向时方向盘转角试验数据
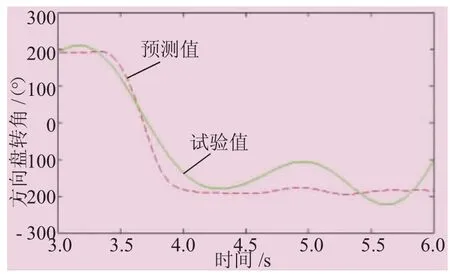
图8 双移线转向时方向盘转角数据对比
5 总结
笔者将HMM和BP神经网络相结合,对SUV运动参数进行预测,将HMM的初步辨识和预测结果作为BP神经网络的训练样本,对BP神经网络进行训练,这样可以准确预测出在下一时间段内车辆的运动参数,为驾驶员直观判断侧翻和电子控制提供依据。
[1]GADEPALLY V,KURT A,KRISHNAMURTHY A,et al.Driver/Vehicle State Estimation and Detection[C].Intelligent Transportation Systems(ITSC),2011 14th International IEEE Conference on,Washington DC,2011.
[2]LIN C C,WANG M S.Vehicle Speeding Early Warning Model Using Frame Feature Detection and HMM[C].Consumer Electronics(ISCE),2011 IEEE 15th International Symposiumon,Singapore,2011.
[3]MAGHSOOD R,JOHANNESSON P.Detection ofthe Curves Based on Lateral Acceleration Using Hidden Markov Models[J].Procedia Engineering,2013,66:425-434.
[4] 马晶晶.基于隐马尔可夫理论的驾驶意图辨识研究[D].长沙:长沙理工大学,2012.
[5] 朱天军,孔现伟,李彬.基于双层隐马尔可夫模型的重型车辆行驶状态辨识方法研究[J].兵工学报,2015,36(10):1832-1840.
[6] 杨川,于德介,徐亚军.基于EMD与BP神经网络的汽车关门声品质预测[J].汽车工程,2013,35(5):457-461,466.
[7] 杨励雅,邵春福.基于BP神经网络与马尔可夫链的城市轨道交通周边房地产价格的组合预测方法[J].吉林大学学报(工学版),2008,38(3):514-519.
[8] 王少然,刘文慧.基于GM(1,1)回归的需求预测优化模型研究[J].机械制造,2016,54(11):1-4.
[9] 吴昌友.神经网络的研究及应用[D].哈尔滨:东北农业大学,2007.
[10赵俊杰.基于模糊神经网络的汽车故障诊断方法研究[D].杭州:杭州电子科技大学,2011.
[11]韩雪.基于参数选取影响BP神经网络训练结果的分析[J].智能计算机与应用,2011(5):43-46.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
今日农业(2020年16期)2020-12-14
今日农业(2020年13期)2020-08-24
模具制造(2019年10期)2020-01-06
红土地(2019年10期)2019-10-30
意林(2017年8期)2017-05-02
新东方英语(2016年11期)2016-11-11
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07
汽车零部件(2014年5期)2014-11-11
