
基于TMS320F28335的三相感应电机矢量控制系统的研究
2018-04-23 09:13杜庆楠
软件 2018年3期
李 拓,杜庆楠
(河南理工大学电气工程与自动化学院,河南 焦作 454000)
0 引言
世界上第一台交流电动机自1885年问世以来,在长达80多年的时间里,但凡是要求调速范围广、速度控制精度高和动态响应性能好的场合,几乎都采用直流电动机调速系统,而交流电动机仅仅被应用在一些不需要调速的拖动场合。主要原因是因为交流电动机是一个多变量、高阶、非线性、强耦合的复杂系统,其在调速性能、调速范围、起制动特性、过载能力方面无法与直流电动机相比拟。直到20世纪 70年代,随着电力电子技术、大规模集成电路和计算机控制技术的快速发展,以及变频技术、矢量控制等技术的出现和应用[1],使得交流调速性能有了突破性进展。而直流电动机自身在换向问题上的固有缺点又无法很好的得以解决,因此对高性能的交流调速系统的研究变得尤为重要,本文所研究的是一个完整的基于TMS320F28335的三相感应电机矢量控制系统[2],运用电流模型进行磁链观测,最终使电机的运行得到了高效的控制。
1 系统整体结构
整个系统以TMS320F28335DSP为核心,整个系统框架包括采样模块、ADC模块、CLARK变换模块、PARK变换模块、PID模块、I-PARK变换模块、SVPWM 模块、CUR-MOD模块以及光电编码器。TMS320C2000系列 DSP集微控制器和高性能DSP的特点于一身,具有强大的控制和信号处理能力[3],能够实现复杂的控制算法,片上整合了Flash存储器、快速的A/D转换器、增强的CAN模块、事件管理器、正交编码电路接口及多通道缓冲串口等外设,此种整合使用用户能够以很便宜的价格开发高性能数字控制系统。F283X系列的DSP更是在原来F28系列定点DSP的基础上增加了浮点运算内核[4],保持原有DSP芯片优点的同时,能够更高效地执行复杂的浮点运算,在处理速度、处理精度方面要求较高的领域,比原F28系列DSP有着更高的性价比。功率部件采用三菱公司的 IPM 模块PM15RSH120,整体结构采用类似变频器结构,所有功率电路和检测部件封装在机壳内部[5],使系统的安全性和可靠性更高[6]。监控部分也安装在机壳内部,可以控制电源通断。人机接口采用液晶显示屏和薄膜开关按键,操作界面更友好,观察信息更方便,和磁粉制动器以及其他辅助控制功能由一个单片机进行控制,不占用DSP的处理时间[7],液晶采用320X240的点阵式液晶显示模块,能显示电机运行的状态曲线。主电源采用单相交流 220V不控整流电源。整体功能结构框图如图1所示。
2 矢量控制的工作原理
由电机学可知,任何电动机产生电磁转矩的原理,在本质上都是电动机内部两个磁场相互作用的结果[8],因此各种电动机的电磁转矩具有统一的表达式,即:

式中, np为电机的极对数; Fs、 Fr为定、转子磁动势矢量的模值;Φm为气隙主磁通矢量的模值;θs、θr为定子磁势空间矢量FS、转子磁动势空间矢量 Fr分别与气隙合成磁势空间矢量 Fh之间的夹角[9](见图二所示),通常用电角度表示为θs=npθms,θr=npθmr,其中θms、θmr为机械角;Fh为气隙合成磁势空间矢量,当忽略铁损时与磁通矢量Φm同轴同向。
由公式(1)及图2 所示的感应电动机磁动势、磁通空间矢量图可以看出,通过控制定子磁动势 FS的模值或控制转子磁动势 Fr的模值及它们在空间的位置,就能达到控制电动机转矩的目的。要想控制 FS或 Fr模值的大小,可以通过控制各相电流的幅值大小来实现,而在空间上的位置角θs、θr,可以通过控制各相电流的瞬时相位来实现。因此,只要能实现对感应电动机定子各相电流(iA、iB、iC)的瞬时控制,就能实现对感应电动机转矩的有效控制。我们可以通过某种等效变换将交流电动机与直流电动机的控制统一起来,从而对交流电动机的控制就可以按照直流电动机转矩、转速规律来实现,这就是矢量控制的工作原理。

图1 整体功能结构框图Fig.1 Overall functional block diagram

图2 感应电动机的磁动势、磁通空间矢量图Fig.2 Induction motor magnetic to motive force, magnetic flux vector space
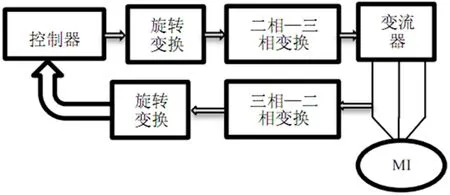
图3 矢量控制过程框图Fig.3 Vector control process diagram
3 系统设计与实现
3.1 硬件设计
该系统主要实现如下模块功能:采样模块、ADC模块、CLARK变换模块、PARK变换模块、PID模块、I-PARK变换模块[10]、SVPWM 模块、CUR-MOD模块以及光电编码器。系统硬件结构图如下图4所示。
①、主电源
主电源位于驱动器内部,为+300V单相不控整流电源[11],带有熔断器。主电源单元是为逆变器提供直流功率电源。
②、键盘控制及显示
此设备为实验系统的操作和监控部件[12],由一个单片机控制板实现。包含1个320*240的LCD点阵显示屏和10个按键的键盘;通过此人机界面可以实现电机转速、负载设定及显示、速度数字或曲线显示、主电源的选择及开关控制[13],通过SPI接口与DSPCPU进行数据交换。
③、功率器件
功率单元采用内部带有驱动和保护功能的 IPM模块。选用产品型号为 PM15RSH120,容量为 15安1200伏。
④、驱动电源
驱动电源采用 4路高隔离耐压的+15V隔离DC-DC模块,分别为功率模块的驱动电路供电。
⑤、脉冲隔离单元
为确保控制电路安全,本系统采用光电耦合器[14],将控制电路与主电路光电隔离。
⑥、脉冲电压保护单元
为了降低 IGBT管关闭瞬间造成的高脉冲电压对电路的影响,在功率模块的输入端使用了高压脉冲吸收电路。
⑦、检测单元
检测单元提供了两路光电隔离电流检测,隔离检测逆变器输出的 A、B两相电流。并将监测到的信号调理成峰-峰值在 0~3.3伏之间的信号,送给DSP的ADC输入端。
⑧、接口单元
前面板为本系统驱动器功率部分到DSPCPU组合板提供电路接口和电平匹配,包括 J1、J2、J3、J7、J8以及J9六个接口单元;后面板为电动机接口J4、磁粉制动器接口J5、异步电机风扇接口J6、三芯电源插座和开关。接口定义见表1,表2所示。

图4 硬件结构框图Fig.4 Hardw are block diagram

表1 接口定义Tab.1 I nterface definition

表2 接口定义Tab.2 I nterface definition
本系统所用的仿真器为USB接口的TDS510型。
⑩、中小功率机组介绍
本系统机组包括三相感应电机、1000线增量式旋转光电编码器,机组通过弹性联轴器使各部件组合,构成该系统需要的电机组,选配非常灵活方便。数控负载由一个磁粉制动器和一个配套的恒流源控制器组成,制动器连接到机组中,通过电缆与恒流源控制器相连。恒流源控制器集成在驱动器中[15],输出值大小通过键盘设置。
3.2 软件设计
程序流程图如图5所示。
子程序列表如表3所示。
部分程序如图6所示。
3.3 算法设计
矢量控制式如公式(2)所示:

式中 Tei为电磁转矩、 CIM=npLmd/Lrd为转矩系数、Ψr为转子磁链、iST为转矩电流、Lmd为互为转子时间常数、p为极对数、为励磁电流、 Lrd为转子电感、 Ws1为转差角频率。该式表明在同步旋转坐标系上,如果按照异步电动机转子磁链定向,且保持励磁电流不变那么转子磁链就不变,此时电磁转矩仅仅与转矩电流相关。此时异步电动机的电磁转矩模型就与直流电动机的电磁转矩模型完全一样了。

图5 程序流程图Fig.5 Pr ogram flow chart

表3 子程序列表Tab.3 Subr outine list

图6 部分程序Fig.6 Part of the program
CLARK变换公式如式(3)所示:

式中αsi为两相静止坐标系中α轴的电流、βsi为两相静止坐标系中β轴的电流、Ai为采样的A相电流、Bi为采样的B相电流。通过此式可将采样的三相静止坐标系的电流转换成两相静止坐标系的电流。
PARK变换公式如式(4)所示:

式中αri、βri为两相静止坐标系,rdi、rqi为两相旋转坐标系,rθ为磁通角度。通过此式便可以将两相静止坐标系转换成两相旋转坐标系。
I-PARK变换公式如式(5)所示:

式中αri、βri为两相静止坐标系,rdi、rqi为两相旋转坐标系,rθ为磁通角度。通过此式便可以将两相旋转坐标系转换成两相静止坐标系。
4 系统测试结果
在实验过程中,经过不断的对影响矢量控制系统控制性能参数的修改,来验证感应电机动态过程中个因素对其控制性能的影响。得到的实验结果如下图所示。
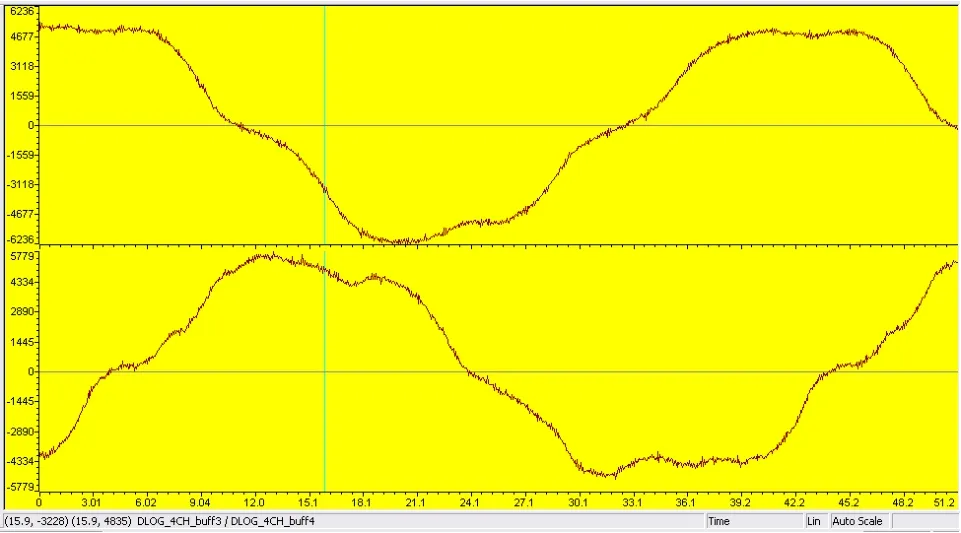
图7 两相采样电流iA、iBFig.7 T wo-phase sampling current iA、iB

图8 解耦后的转矩电流与励磁电流iq、idFig.8 Decoupled torque current and excitation current

图9 给定磁链与测量磁链之间的对比Fig.9 Shows the comparison between flux and flux measurement

图10 显示器上的速度曲线Fig.10 Shows the speed curve on the display
经分析,该系统通过一系列的矢量变换将采样的三相静止坐标系下的电流变换成两相旋转坐标系下的电流,较好的实现了定子电流的完全解耦。并通过电流模型法观测磁链,从而能够精准的进行磁场定向。并通过光电编码器实时估计转速信息与给定速度构成闭环反馈。在实验过程中发现磁链的周期计算结果随电机速度快慢变化而变化,当还没有实现沿转子磁场定向时随电机方向不同而呈现正向磁链和反向磁链,此时励磁电流会出现为负的现象,不过这一点并不会影响电流模型磁链的计算。该系统使得感应电机的转速与转矩电流之间几乎成线性关系,其控制性能完全可以与直流电机相媲美。
[1] 胡蝶, 赵璞, 陈明爽, 等. 多源空间矢量数据一致性处理技术探讨[J]. 软件, 2016, 37(4): 13-17
[2] 石俊杰, 童名文. 内容适配系统控制模型研究[J]. 软件,2013, 34(5): 53-55
[3] 邓月.X 光信号采集模块的设计与实现[J]. 软件, 2013,34(8): 88-91
[4] 董庆洲, 徐明伟, 杨芫.身份/ 位置分离映射表在Linux 内核中的实现[J].新型工业化, 2012, 2(2): 46-51.
[5] 林博, 徐明伟, 李琦.基于背景流量的故障检测研究[J].新型工业化, 2012, 2(2): 1-7.
[6] 耿志强, 杨科, 韩永明.基于数据驱动有向图和高阶统计的控制系统故障检测方法[J].新型工业化, 2013, 3(11): 1-11
[7] 何永勃, 夏文卿, 董玉珊.基于模糊自适应算法的异步电机矢量控制系统[J].中国民航大学学报, 2017, 35(01): 47-51.
[8] 陈华玉. 感应电机矢量控制系统的参数辨识研究[D].天津理工大学, 2017
[9] Wang Lei, Xiao Yun-shi} Wu Qi-di, Zhou Guo-xing.Neural ]network based parameter identification and adaptive speed control of ac drive system [C]. Proceedings of the IEEE International Conference on Industrial Technology 1996: 118-121.
[10] Kung Y S, Liaw C M, Ouyang M S. Adaptive speed control for induction motor drives using neural networks[J]. IEEE Transactions on Industrial Electronics, 1995, 42 (1): 25-32.
[11] Orlowska-Kowalska T, Kowalski C T. Neural network application for flux and speed estimation in the sensorless induction motor drive[C]. Proceedings of the IEEE International Symposium on Industrial Electronics, 1997(3): 1253-1258.
[12] Toh A K P, Nowicki E P, Ashrafzadeh F. Flux estimator for field oriented control of an induction motor using an artificial neural network[C]. Conference Record of the 1994 IEEE IndustryApplications SocietyAnnual Meeting, 1994(1): 585-592.
[13] Elloumi M} Ben-Brahim L} A1-Hamadi M A. Survey of speed sensorless controls for IMdrives[C]. Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics-Society. 1998(2): 1018-1023.
[14] Ohtani T, Takada N, Tanaka K .Vector control of induction motor without shaftencoder[J]. IEEE transactions on IndustryApplications} 1992 28 (1): 157-164.
[15] Tsuji M Shuo Chen Izumi K. Ohta T. et al. A speed sensorless induction motor vector control system using q-axis flux with parameter identification[C]. Proceedings of the 23rdInternational Conference on Industrial Electronics Control and Instrumentation 1997(2): 960-965.
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年10期)2016-04-12
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
出版与印刷(2013年3期)2013-01-31
