
运动声呐空时自适应处理中的多普勒影响分析
2018-04-25 07:05郝程鹏
海军航空大学学报 2018年1期
李 娜,施 博,郝程鹏
(1.中国科学院声学研究所,北京100190;2.中国科学院大学,北京100049)
混响是主动声呐工作时的一个主要干扰,严重影响主动声呐对信号的检测性能[1-3]。不同于普通噪声,当声呐波束触及海面或海底时,混响将从不同锥角入射引起多普勒扩展,这使得混响具有空时二维耦合的特性[4-5],即使采用常规波束形成加自身多普勒抑制这种级联处理的方法也难以有效消除由于旁瓣进入接收机的混响[6]。混响空时耦合特性与机载雷达的地物杂波特性非常相似。1973年,Brennan等[7]提出了空时自适应处理(Space Time Adaptive Processing,STAP),STAP联合应用回波的空时二维特性,将一维的空域滤波推广到空间和时间二维域中。研究人员首先将STAP技术应用于机载雷达中,获得了很好的杂波抑制效果[8-9]。由于混响与杂波特性的相似性,在水声信号处理中,STAP被认为是一种有研究前景的混响抑制算法[10]。
目前,国内外对于水声STAP的研究仅仅处于起步状态,可查的文献不多。赵申东研究了STAP算法在水下环境中的应用[11-13],文中对比雷达STAP,针对水下环境声呐工作方式进行了一些修改。吕维考虑了空时耦合项对STAP的影响[14-15],采用类比雷达接收信号的方式说明水声STAP的空时导向向量,并没有从数学上进行推导,也没有考虑信号脉冲的伸缩变化带来的影响,难以与水下环境相匹配。本文针对这一不足开展研究,综合考虑了空时导向向量修正项和信号脉宽变化对STAP的影响,具体分析了修正项对混响的抑制作用,以及信号脉宽变化对信号检测能力的影响。
1 STAP处理方法
1.1 STAP处理流程
声呐进行基于STAP的接收处理,要进行距离门采样,匹配滤波,数据加权处理等处理步骤。具体流程见图1。

图1 STAP接收机模型Fig.1 STAP receiver model
1)按距离门进行采样,由于声呐采用单脉冲的形式发射信号,在一个探测周期内,理论上目标回波会出现在与脉冲宽度等长的一段混响中。因此,按照图2所示进行采样。
2)为增大目标信号的信噪比,提高目标的检测性能,通常对接收回波进性匹配滤波,匹配滤波被认为是白噪声背景下的使输出信噪比达到最大的最佳线性滤波器。
3)STAP最优处理器采用了最大化信号干扰噪声比(Signal to Interference Plus Noise Ratio,SINR)的原则,及在噪声加干扰的条件下,使目标更容易被检测到,求取STAP最优加权向量,对数据进行加权处理。

图2 声呐数据结构Fig.2 Sonar data structure
1.2 声呐STAP原理
STAP实质上是将一维空域滤波技术推广到时间和空间二维域中,并在高斯杂波背景加确知信号(即目标的多普勒频率与空间角已知)的模型下,根据似然比检测理论导出的最优处理器[16]。STAP原理满足如下的约束条件:

式(1)中:R=E[rrH]为接收数据的协方差矩阵;r为接收数据;w为需计算求出的STAP处理器的权向量;a=as(ωs)⊗at(ωt)为空时二维导向向量,其中,as(ωs)为空域导向向量,at(ωt)为时域导向向量,ωs为空域角频率,ωt为时域角频率,⊗表示kronecker乘积运算。
求解方程可以求得最优加权向量为:

由阵列的指向性构成空域维度,由连续采样点之间的多普勒频率差异构成时域维度。
从接收目标回波入手,将其降到基带并重采样得到数字信号为:

式(3)中:Am为每个采样点的幅度。
由此,便可得到空域、时域导向向量,详细推导过程参考文献[17]。

空时导向向量为:


值得说明的是,多普勒效应会对接收回波的包络脉宽和信号频率造成影响,进而会影响匹配滤波输出信噪比,影响STAP权向量造成模型失配。对于水下环境,失配问题尤为突出。
2 多普勒对STAP的影响
由于水下声速较小,信号从发射到接收的时延较长,多脉冲积累效果不好,因而声呐发射信号多采用单脉冲信号[18]。长连续波(Continuous Wave,CW)适用低速运动目标的检测。由于水中声速c=1500 m/s,与某些高速运动目标速度vp存在可比性,不再满足c≫vp这个条件,所以多普勒效应对接收回波的影响不可忽略。
2.1 声呐目标回波

可见,多普勒效应导致接收回波脉宽发生了改变。t时刻发射的单脉冲信号s(t),经时间延迟τ(t)后,阵元n接收到的目标回波信号可以表示为:

2.2 多普勒脉宽变化
由于存在多普勒效应影响,接收机接收到的信号包络脉宽会发生变化,由式知由T变为T′,所以不能直接使用发射信号作为匹配滤波器的副本,需将副本信号包络脉宽修正为T′。
接收信号包络可以表示为:

将匹配副本修正为s͂ref(t)=r͂(t)。对一个距离门数据做匹配滤波,分别使用s͂ref(t)和s͂(t)作为匹配副本。为了分析时观察现象明显,分析中取多普勒系数β为-0.5(0.5),此 时 接 收 目 标 回 波 脉 宽 为T′=T/2(T′=3T/2),副本信号s͂ref(t)的脉宽相应的变为T′,而副本信号s͂(t)脉宽仍为T。
匹配滤波结果如图3所示,可以清楚看到多普勒脉宽变化对滤波结果的影响。

图3 距离门数据匹配滤波结果Fig.3 Result of cell data match filter
2.3 空域导向向量修正
由于声呐系统发射单脉冲,区别于雷达系统的多脉冲,所以声呐STAP与雷达STAP空时导向向量有差异。雷达STAP的空域、时域导向向量为[19]:
式(9)与式(3)相比,单脉冲空域导向向量有一个修正,可以看到这个修正是由 e-j2πfdnτn引起的,可将其变形为:

由式(11)可知,修正项是空域角频率与时域角频率的交叉项,被称为空时耦合项[14-15]。针对修正项的分析可以得到结论,单脉冲STAP空时导向向量中存在修正项,由于该修正项可以合并到空域导向向量中,所以有理由认为修正项的物理意义是对空域导向向量的修正。由于修正项的存在,可以对目标方位进行更精确的估计。
3 仿真及分析
3.1 脉宽变化影响
仿真中,发射频率为15 kHz,脉宽为32 ms的CW波,采样率为2 kHz,信混比SRR为-6dB,平台运动速度为10 m/s,接收阵列为16元等间距线列阵。
采用2.2节的处理方式,对目标回波所在距离门数据进行匹配滤波,匹配副本分别采用s͂ref(t)和s͂(t),得到输出结果后,计算2种方法的SRR差,称为SRR改善量。
图4给出了SRR改善量随目标速度v变化情况。由图4可以看出,当目标速度v=10 m/s(目标与声呐平台相对静止)时,信混比改善量为0,当v>10 m/s时,包络脉宽修正方法效果有一定改善,但是并不明显,因而在后续仿真中不再考虑。

图4 信混比改善量随目标速度变化情况Fig.4 SRR improvement with change of target speed
3.2 空时导向向量修正项影响
仿真目标运动速度5 m/s,方位30°(对应目标多普勒频率为114Hz),其余参数设置与3.1节相同。用主波束方向最大混响多普勒频率进行归一化,这样目标多普勒频率的归一化值为0.56。采用改善因子来衡量算法性能,改善因子定义为STAP输出信号SRR与输入SRR的比值[19]。图5、6给出了不考虑修正项方法和考虑修正项方法的空时图谱,图7为扫描方位谱,可看到考虑修正项方法的方位角估计值为30°,与真值一致,而传统方法角度估计为30.4°,有0.4°偏差。由图6看到,当归一化多普勒频率fdn=0.56时(目标多普勒),椭圆形混响脊对应的空间方位角为±55.4°。

图5 未考虑修正项时的空时谱Fig.5 Power spectrum without correction item

图6 考虑修正项时的空时谱Fig.6 Power spectrum with correction item

图7 扫描方位谱Fig.7 Scan azimuth spectrum
图8给出的是fdn=0.56时,改善因子与空间方位角的关系。从图8可以看出在2个对称方位存在凹陷,该位置是目标多普勒(fdn=0.56)对应的混响方位,与图6中混响脊对应的空间方位角相同。还可以看出,在混响脊附近考虑修正项的方法改善因子更大,混响抑制能力明显提高。
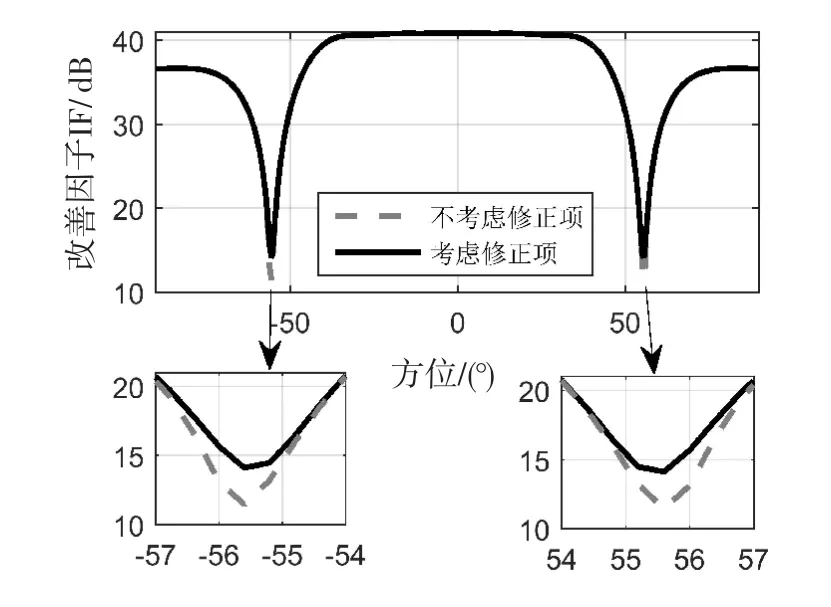
图8 空时耦合STAP改善因子Fig.8 Improvement factor of couple STAP
4 结论
本文系统分析了目标多普勒对运动声呐STAP的影响,得到的结论包括:①包络脉宽修正方法对于高速运动目标检测性能有一定改善,但改善效果不明显,因此实际应用中可不予考虑。②修正项实质上是对空域导向向量的一个修正,可以使目标方位估计更精确。③修正项为低速运动目标带来明显的混响抑制效果,有利于目标检测。
参考文献:
[1]刘贯领,凌国民,严琪.主动声纳检测技术的回顾和展望[J].声学技术,2007,26(2):335-340.LIU GUANLING,LING GUOMIN,YAN QI.Review and prospect of active sonar detection techniques[J].TechnicalAcoustics,2007,26(2):335-340.(in Chinese)
[2]刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,2010:200-234.LIU BOSHENG,LEI JIAYU.Water acoustics principle[M].Harbin:Harbin Engineering University Press,2010:200-234.(in Chinese)
[3]朱埜.主动声纳检测信息原理[M].3版.北京:科学出版社,2014:447-503.ZHU YE.Active sonar detection principle[M].3rded.Beijing:Science Press,2014:447-503.(in Chinese)
[4]赵申东,唐劲松,蔡志明.小快拍数的线阵空时自适应处理方法[J].系统工程与电子技术,2008,30(9):1616-1620.ZHAO SHENDONG,TANG JINSONG,CAI ZHIMING.Space-time adaptive processing for line array with a small number of snapshots[J].System Engineering and Electronics,2008,30(9):1616-1620.(in Chinese)
[5]詹昊可,蔡志明,苑秉成.浅海混响扩展的空时2D分布与混响抑制[J].鱼雷技术,2009,17(2):29-32.ZHAN HAOKE,CAI ZHIMING,YUAN BINGCHENG.Space-time two-dimensional distribution of reverberation in shallow water and anti-reverberation[J].Torpedo Technology,2009,17(2):29-32.(in Chinese)
[6]詹昊可,蔡志明,苑秉成.一种共形阵主动声纳空时自适应混响抑制方法[J].声学技术,2007,26(3):488-492.ZHAN HAOKE,CAI ZHIMING,YUAN BINGCHENG.Space-time adaptive re-verberation suppression in active conformal sonar of torpedo[J].Technical Acoustics,2007,26(3):488-492.(in Chinese)
[7]BRENNAN L E,REED L S.Theory of adaptive radar[J].IEEE Transactions on Aerospace and Electronic Systems,1973,9(2):237-252.
[8]保铮,廖桂生,吴仁彪,等.相控阵机载雷达杂波抑制的时- 空二维自适应滤波[J].电子学报,1993,21(9):1-7.BAO ZHENG,LIAO GUISHENG,WU RENBIAO,et al.2D tem-poral-spatial adaptive clutter suppression for phased array airborne radars[J].Acta Electronica Sinca,1993,21(9):1-7.(in Chinese)
[9]王永良,李天泉.机载雷达空时自适应信号处理技术回顾与展望[J].中国电子科学研究院学报,2008,13(3):271-275.WANG YONGLIANG,LI TIANQUAN.Overview and outlook of space time adaptive signal processing for airborne radar[J].Journal of China Adademy of Electronics and Information Technology,2008,13(3):271-275.(in Chinese)
[10]MIO K,CHOCHEYRAS Y,DOISY Y.Space time adaptive processing for low frequency sonar[C]//OCEANS 2000 MTS:IEEE Conference and Exhibition.New York:IEEE,2000:1315-1319.
[11]赵申东,唐劲松,蔡志明.声自导鱼雷空时自适应处理[J].鱼雷技术,2008,16(2):25-30.ZHAO SHENDONG,TANG JINSONG,CAI ZHIMING.Space time adaptive processing of acoustic homing torpedo[J].Torpedo Technology,2008,16(2):25-30.(in Chinese)
[12]詹昊可,蔡志明,苑秉成.鱼雷声纳空时自适应混响抑制方法[J].武汉理工大学学报:交通科学与工程版,2007,31(6):946-950.ZHAN HAOKE,CAI ZHIMING,YUAN BINGCHENG.Space-time adaptive reverberation suppression in active sonar of torpedo[J].Journal of Wuhan University of technology:Transportation Science&Engineering,2007,31(6):946-950.(in Chinese)
[13]夏雪,张明敏,王平波.PAMF处理的抗混响应用仿真研究[J].武汉理工大学学报:交通科学与工程版,2013,37(4):856-860.XIA XUE,ZHANGMINGMIN,WANG PINGBO.Study on the adhibition of reverberation suppressing for PAMF processor[J].Journal of Wuhan University of Technology:Transportation Science&Engineering,2013,37(4):856-860.(in Chinese)
[14]吕维,王志杰,李建辰.空时耦合项对空时自适应处理的影响[J].西安电子科技大学学报,2012,39(2):207-2121.LV WEI,WANG ZHIJIE,LI JIANCHEN.Influence of the space-time coupling term on STAP[J].Journal of Xidian University:Natural Science,2012,39(2):207-2121.(in Chinese)
[15]吕维,王志杰,李建辰,等.修正空时自适应处理在水下自导系统中的应用[J].兵工学报,2012,33(8):944-950.LV WEI,WANG ZHIJIE,LI JIANCHEN,et al.Application of modified space-time adaptive processing in sonar[J].Acta Armamentarii,2012,33(8):944-950.(in Chinese)
[16]王永良,彭应宁.空时自适应信号处理[M].北京:清华大学出版社,2000:46-51.WANG YONGLIANG,PENG YINGNING.Space-time adaptive processing[M].Beijing:Tsinghua University Press,2000:46-51.(in Chinese)
[17]郝程鹏,施博,闫晟,等.主动声纳混响抑制与目标检测技术[J].科技导报,2017,35(20):102-108.HAO CHENGPENG,SHI BO,YAN SHENG,et al.Reverberation suppression and target detection for active sonar[J].Science&Technology Review,2017,35(20):102-108.(in Chinese)
[18]KLEMM R.Principles of space-time adaptive processing[M].London:The Institution of Engineering and Technology,2002:545-546.
[19]WARD J.Space-time adaptive processing for airborne radar:TR-1015[R].Lexington,Massachusetts:Lincoln Liboratory,1994:71-72.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
北京航空航天大学学报(2021年9期)2021-11-02
昆明医科大学学报(2021年2期)2021-03-29
军民两用技术与产品(2021年10期)2021-03-16
环球时报(2021-02-01)2021-02-01
民用飞机设计与研究(2020年4期)2021-01-21
数字海洋与水下攻防(2020年5期)2021-01-04
科技视界(2020年8期)2020-05-18
海军航空大学学报(2019年1期)2019-04-29
现代兵器(2016年12期)2016-12-22
